一种基于复数理论的激光点云描述符构建方法及系统
本发明属于自动驾驶高精度定位领域,具体涉及一种基于复数理论的激光点云描述符构建方法及系统。
背景技术:
1、智能化,信息化,数字化是未来交通领域的重要演化方向,不仅能从根本上改善人类出行方式,更拥有着巨大的社会效益。作为感知和定位的关键传感器-激光雷达,可以获取丰富的环境信息。这些环境信息不仅可以用来快速识别当前位置,更能轻松地辨别周围的环境状态。但在实际使用中,由于激光雷的低分辨率,获取的一帧信息存在不同程度的误差。此外,由于大量的激光雷达数据,从中寻找到相似的扫描也需要较多的时间成本。
2、现有的解决方案多将一帧点云数据表示为一个紧凑的结构,通过比较当前扫描点云的结构与数据库中点云结构的相似性来进行快速查找。但由于激光雷达的低分辨率,所获取的紧凑结构总存在不同程度的误差。此外,现有的紧凑结构多使用激光雷达的单一信息,无疑降低了对原始测量的表示程度,从而降低了对真实世界的环境表达能力。在面对大规模的点云数据时,由于传统结构的不充分表示,可能会导致检测失败或错误检测等一系列问题,从而降低激光雷达的效果,最终导致无法满足激光雷达的定位需求。
技术实现思路
1、本发明的目的在于提供一种基于复数理论的激光点云描述符构建方法及系统,以克服现有技术会导致检测失败或错误检测等一系列问题,从而降低激光雷达的效果,最终导致无法满足激光雷达的定位需求。
2、一种基于复数理论的激光点云描述符构建方法,包括以下步骤:
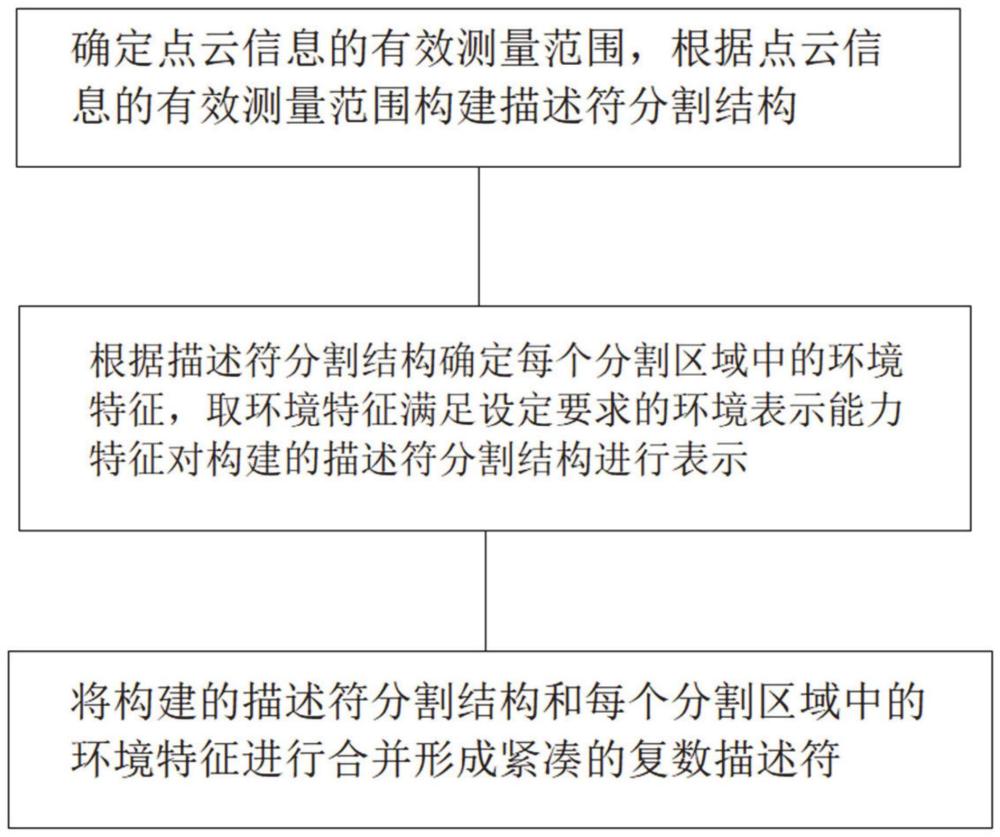
3、s1,确定点云信息的有效测量范围,根据点云信息的有效测量范围构建描述符分割结构;
4、s2,根据描述符分割结构确定每个分割区域中的环境特征,取环境特征满足设定要求的环境表示能力特征对构建的描述符分割结构进行表示;
5、s3,将构建的描述符分割结构和每个分割区域中的环境特征进行合并形成紧凑的复数描述符。
6、优选的,根据载体大小和传感器的型号确定点云信息的有效测量范围。
7、优选的,确定有效测量范围点云空间的分割结构,并将点云空间进行分割表示,构建点云描述符结构;针对已经确定的分割结构确定描述符的分辨率和分割参数,形成最终描述符空间结构。
8、优选的,采用以下公式确定点云信息的有效测量范围:
9、
10、d=max(plength,pwidth) (2)
11、max(tan(λi)-tan(λi-1))*d≤δe (3)
12、
13、其中d是有效测量范围的内边界,d是有效测量范围的外边界;plength和pwidth分别时激光雷达载体的宽和高,取较大的取值作为内边界的范围,防止将载体信息误判为环境的测量;λi和λi-1分别是激光雷达第i和i-1激光扫描线的纵向角分辨率;δe是环境表示能接受的误差大小。
14、优选的,根据点云信息的有效测量范围构建描述符分割结构:
15、将激光点云空间划分为若干个子空间区域:
16、
17、
18、其中ρi是极坐标的极径,θi是对应的极角。
19、优选的,根据描述符分割结构确定每个分割区域中的环境特征包括:每个分割空间的最大高度信息,每个分割空间的最大强度信息,每个分割空间的激光点个数信息,和每个分割空间的最大距离信息。
20、一种基于复数理论的激光点云描述符构建系统,包括描述符分割模块,描述符分割结构模块和描述符构建模块;
21、描述符分割模块,确定点云信息的有效测量范围,根据点云信息的有效测量范围构建描述符分割结构;
22、描述符分割结构模块,根据描述符分割结构确定每个分割区域中的环境特征,取环境特征满足设定要求的环境表示能力特征对构建的描述符分割结构进行表示;
23、描述符构建模块,将构建的描述符分割结构和每个分割区域中的环境特征进行合并形成紧凑的复数描述符。
24、优选的,根据载体大小和传感器的型号确定点云信息的有效测量范围。
25、优选的,确定有效测量范围点云空间的分割结构,并将点云空间进行分割表示,构建点云描述符结构;针对已经确定的分割结构确定描述符的分辨率和分割参数,形成最终描述符空间结构。
26、优选的,采用以下公式确定点云信息的有效测量范围:
27、
28、d=max(plength,pwidth) (2)
29、max(tan(λi)-tan(λi-1))*d≤δe (3)
30、
31、其中d是有效测量范围的内边界,d是有效测量范围的外边界;plength和pwidth分别时激光雷达载体的宽和高,取较大的取值作为内边界的范围,防止将载体信息误判为环境的测量;λi和λi-1分别是激光雷达第i和i-1激光扫描线的纵向角分辨率;δe是环境表示能接受的误差大小。
32、与现有技术相比,本发明具有以下有益的技术效果:
33、本发明提供一种基于复数理论的激光点云描述符构建方法,确定点云信息的有效测量范围,根据点云信息的有效测量范围构建描述符分割结构:根据描述符分割结构确定每个分割区域中的环境特征,取环境特征满足设定要求的环境表示能力特征对构建的描述符分割结构进行表示;最后将构建的描述符分割结构和每个分割区域中的环境特征进行合并形成紧凑的复数描述符,通过本方法提出的合并策略映射到紧凑的复数结构中,形成一个紧凑的激光雷达描述,考虑激光雷达低分辨率导致的测量误差,对原始点云空间进行不规则分割,提高分割每部分所提取信息的可靠性。本发明考虑单一信息环境表达能力较差的问题,提取任意每一区域两种具有代表性的特征,提高了环境表达能力。
34、本发明考虑点云描述符的紧凑性和信息优先级,提出多种合并策略,提高了描述符的环境表示能力和信息鲁棒性。
技术特征:
1.一种基于复数理论的激光点云描述符构建方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于复数理论的激光点云描述符构建方法,其特征在于,根据载体大小和传感器的型号确定点云信息的有效测量范围。
3.根据权利要求1所述的一种基于复数理论的激光点云描述符构建方法,其特征在于,确定有效测量范围点云空间的分割结构,并将点云空间进行分割表示,构建点云描述符结构;针对已经确定的分割结构确定描述符的分辨率和分割参数,形成最终描述符空间结构。
4.根据权利要求1所述的一种基于复数理论的激光点云描述符构建方法,其特征在于,采用以下公式确定点云信息的有效测量范围:
5.根据权利要求1所述的一种基于复数理论的激光点云描述符构建方法,其特征在于,根据点云信息的有效测量范围构建描述符分割结构:
6.根据权利要求1所述的一种基于复数理论的激光点云描述符构建方法,其特征在于,根据描述符分割结构确定每个分割区域中的环境特征包括:每个分割空间的最大高度信息,每个分割空间的最大强度信息,每个分割空间的激光点个数信息,和每个分割空间的最大距离信息。
7.一种基于复数理论的激光点云描述符构建系统,其特征在于,包括描述符分割模块,描述符分割结构模块和描述符构建模块;
8.根据权利要求7所述的一种基于复数理论的激光点云描述符构建系统,其特征在于,根据载体大小和传感器的型号确定点云信息的有效测量范围。
9.根据权利要求7所述的一种基于复数理论的激光点云描述符构建系统,其特征在于,确定有效测量范围点云空间的分割结构,并将点云空间进行分割表示,构建点云描述符结构;针对已经确定的分割结构确定描述符的分辨率和分割参数,形成最终描述符空间结构。
10.根据权利要求7所述的一种基于复数理论的激光点云描述符构建系统,其特征在于,采用以下公式确定点云信息的有效测量范围:
技术总结
本发明公开了一种基于复数理论的激光点云描述符构建方法及系统,确定点云信息的有效测量范围,根据点云信息的有效测量范围构建描述符分割结构:根据描述符分割结构确定每个分割区域中的环境特征,取环境特征满足设定要求的环境表示能力特征对构建的描述符分割结构进行表示;将构建的描述符分割结构和每个分割区域中的环境特征进行合并形成紧凑的复数描述符,本发明考虑激光雷达低分辨率导致的测量误差,对原始点云空间进行不规则分割,提高分割每部分所提取信息的可靠性。本发明考虑单一信息环境表达能力较差的问题,提取任意每一区域两种具有代表性的特征,提高了环境表达能力。
技术研发人员:赵祥模,王武祺,闵海根,吴霞,徐志刚,尚旭明,刘占文,王润民,方煜坤,夏森,雷小平,李尧,延昌磊,杨龙
受保护的技术使用者:长安大学
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!