基于空频嵌套阵列移动的时延和二维角度联合估计方法
本发明涉及基于空频嵌套阵列移动的时延和二维角度联合估计方法,属于阵列信号处理。
背景技术:
1、信号源定位是无线通信、雷达系统和卫星导航等领域的一个重要问题。时延(time-of-arrival,简称toa)和二维角度(two-dimensional direction-of-arrival,简称2d-doa)提供了有关信号源位置的关键信息。
2、众所周知,传统的toa/2d-doa联合估计方法通常基于均匀排列的二维传感器阵列以及大量的快拍,存在显著的硬件成本、复杂的计算需求以及数据冗余等问题。稀疏阵列和稀疏采样方法结合形成空频稀疏阵列方法的提出缓解了这些问题所带来的压力。此外,随着合成孔径处理技术的引入,进一步增加了虚拟阵列的自由度。
3、然而,基于移动平台的合成稀疏阵列通常与原始阵列维数相同,同时,构造的空频稀疏阵列以互质阵列和互质采样方式为主,导致形成的虚拟空频阵列存在孔洞。因此,原始传感器阵列仍然要求满足二维排布,消耗的空间资源并未减少,并且利用空频互质阵列接收的信号不能完全利用,此外,toa/2d-doa联合估计的计算需求也未降低。
4、公开于该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域普通技术人员所公知的现有技术。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供基于空频嵌套阵列移动的时延和二维角度联合估计方法,通过线性嵌套传感器阵列的构建以及基于欧式距离的网格估计法,在提高估计精度的同时,实现物理成本、空间资源,以及计算资源的节约。
2、为达到上述目的,本发明是采用下述技术方案实现的:
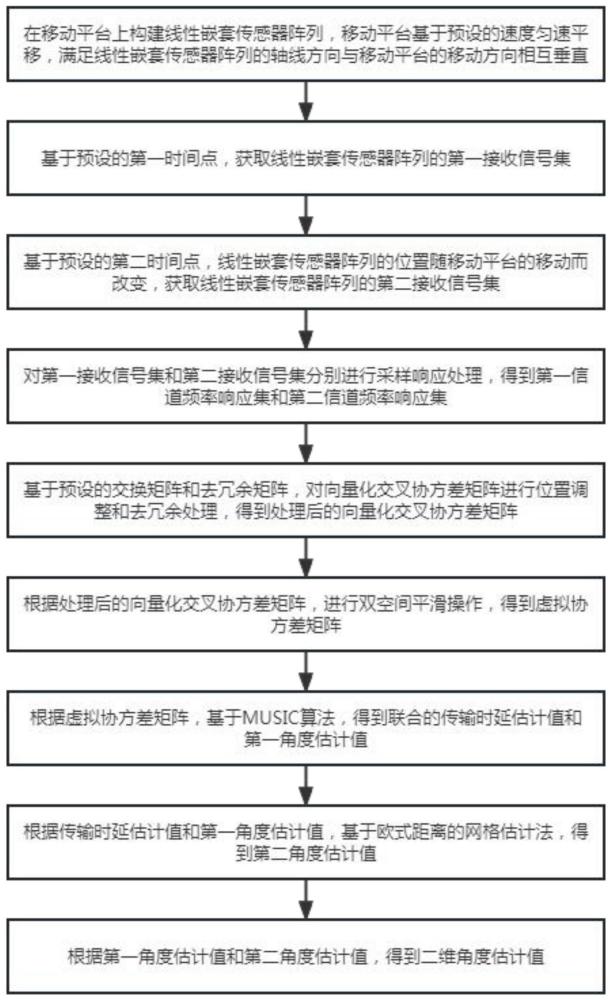
3、本发明公开了基于空频嵌套阵列移动的时延和二维角度联合估计方法,在移动平台上构建线性嵌套传感器阵列,所述移动平台基于预设的速度匀速平移,满足线性嵌套传感器阵列的轴线方向与移动平台的移动方向相互垂直,所述线性嵌套传感器阵列的位置随移动平台的移动而改变;所述联合估计方法包括如下步骤:
4、基于预设的第一时间点,获取所述线性嵌套传感器阵列的第一接收信号集;
5、基于预设的第二时间点,获取所述线性嵌套传感器阵列的第二接收信号集;
6、对所述第一接收信号集和第二接收信号集分别进行采样响应处理,得到第一信道频率响应集和第二信道频率响应集;
7、根据所述第一信道频率响应集和第二信道频率响应集,计算得到向量化交叉协方差矩阵;
8、基于预设的交换矩阵和去冗余矩阵,对所述向量化交叉协方差矩阵进行位置调整和去冗余处理,得到处理后的向量化交叉协方差矩阵;
9、根据所述处理后的向量化交叉协方差矩阵,进行双空间平滑操作,得到虚拟协方差矩阵;
10、根据所述虚拟协方差矩阵,基于music算法,得到联合的传输时延估计值和第一角度估计值;
11、根据所述传输时延估计值和第一角度估计值,基于欧式距离的网格估计法,得到第二角度估计值;根据所述第一角度估计值和第二角度估计值,得到二维角度估计值。
12、进一步的,所述线性嵌套传感器阵列包括子阵列一和子阵列二,所述子阵列一和子阵列二均为均匀线性阵列ula;
13、所述子阵列一的多个传感器呈密集排列;所述子阵列二的多个传感器呈稀疏排列;
14、基于预设的第一时间点和第二时间点,每一个传感器随移动平台的移动获取第一接收信号和第二接收信号;所述第一接收信号集包括所有传感器获取的第一接收信号,所述第二接收信号集包括所有传感器获取的第二接收信号;
15、所述线性嵌套阵列的传感器位置集合表示为:
16、sa={n1d,0≤n1≤n1-1}∪{[n2(n1+1)+n1]d,0≤n2≤n2-1}
17、式中,sa表示线性嵌套传感器阵列的传感器位置集合,包括n个传感器的位置,n=n1+n2;n1表示子阵列一的传感器的序引;d表示子阵列一的相邻传感器的间距;n1表示子阵列一的传感器的数量;n2表示子阵列二的传感器的序引;n2表示子阵列二的传感器的数量。
18、进一步的,所述采样响应处理包括如下步骤:
19、每一个传感器配置有第一采样器和第二采样器,所述第一采样器的采样频率为δf,采样次数为k1;第二采样器的采样频率为(k1+1)δf,采样次数为k2,进而构建嵌套类型的采样信号频率偏移集合,表达式如下:
20、st={k1δf,0≤k1≤k1-1}∪{[k2(k1+1)+k1]δf,0≤k2≤k2-1}
21、式中,st表示采样信号频率偏移集合,包括k个频率偏移量的数值,k=k1+k2;k1表示第一采样器采样的频率偏移量的序引;δf表示第一采样器的采样频率;k1表示第一采样器的采样次数;k2表示第二采样器采样的频率偏移量的序引;k2表示第二采样器的采样次数;
22、针对任一传感器获取的第一接收信号,输入至预设的第一采样器和第二采样器,得到第一原始采样信号和第二原始采样信号;对所述第一原始采样信号和第二原始采样信号分别进行频域转换后进行合并处理,基于采样信号频率偏移集合,得到第一采样信号集;合并所有传感器的第一采样信号集的信道频率响应,得到第一信道频率响应集;
23、针对任一传感器获取的第二接收信号,输入至预设的第一采样器和第二采样器,得到第三原始采样信号和第四原始采样信号;对所述第三原始采样信号和第四原始采样信号分别进行频域转换后进行合并处理,基于采样信号频率偏移集合,得到第二采样信号集;合并所有传感器的第二采样信号集的信道频率响应,得到第二信道频率响应集。
24、进一步的,所述第一信道频率响应集的表达式如下:
25、
26、式中,c表示第一信道频率响应集;a(τ,α)表示联合传输时延τ和第一角度α的阵列流形矩阵,
27、a(τ,α)=[a(τ1,α1),a(τ2,α2),…,a(τm,αm),…,a(τm,αm)],
28、其中,a(τm,αm)表示联合τm和αm的转向矢量;τm表示第m个入射信号的传输时延;αm表示第m个入射信号的第一角度;
29、a(τm)表示第m个入射信号的时延转向矢量,j表示虚数单位;表示采样信号频率偏移集合st中第k个频率偏移量的数值,f表示载波频率;
30、a(αm)表示第m个入射信号的角度转向矢量,表示线性嵌套传感器阵列的传感器位置集合sa中第n个传感器位置的数值;
31、r表示信号发射源的复衰减系数的集合,r=[r1,r2,…,rm,…,rm]t,rm表示第m个入射信号的复衰减系数;
32、w表示第一信道频率响应集的加性高斯白噪声分量;
33、表示复数域的nk×1维向量。
34、进一步的,所述第二信道频率响应集的表达式如下:
35、
36、表示第二信道频率响应集;p表示只包含第二角度β参数信息的对角矩阵,表示第二信道频率响应集的加性高斯白噪声分量。
37、进一步的,所述向量化交叉协方差矩阵的表达式如下:
38、
39、式中,z表示向量化交叉协方差矩阵;vec表示向量化;表示交叉协方差矩阵,e表示期望算子,c表示第一信道频率响应集,表示第二信道频率响应集;av表示虚拟联合阵列流形矩阵,
40、av=[av(τ1,α1),av(τ2,α2),…,av(τm,αm),…,av(τm,αm)],av(τm,αm)表示虚拟联合转向矢量,
41、g表示只包含第二角度β参数信息的对角矩阵与衰减系数的自协方差矩阵结合数据的向量化表示,
42、βm表示第m个入射信号的第二角度;rm表示第m个入射信号的复衰减系数。
43、进一步的,得到处理后的向量化交叉协方差矩阵,包括如下步骤:
44、基于预设的交换矩阵,对所述向量化交叉协方差矩阵进行位置调整,得到交换后的向量化交叉协方差矩阵;
45、基于预设的去冗余矩阵,对所述交换后的向量化交叉协方差矩阵进行去冗余处理,得到处理后的向量化交叉协方差矩阵;
46、其中,所述交换后的向量化交叉协方差矩阵的表达式如下:
47、
48、式中,表示交换后的向量化交叉协方差矩阵;π表示预设的交换矩阵;z表示向量化交叉协方差矩阵;表示位置交换后的虚拟联合阵列流形矩阵;
49、所述处理后的向量化交叉协方差矩阵的表达式如下:
50、
51、式中,表示处理后的向量化交叉协方差矩阵;tt表示时延阵列流行矩阵的去冗余矩阵;ta表示角度阵列流行矩阵的去冗余矩阵;at表示虚拟时延阵列流行矩阵;⊙表示khatri-rao乘积算子;aa表示虚拟角度联合阵列流行矩阵;表示复数域的ltla×1维向量。
52、进一步的,所述双空间平滑操作的步骤如下:
53、将所述处理后的向量化交叉协方差矩阵内对的元素按照排列顺序分成lt组元素向量,每组元素向量包含la个元素;
54、针对任一组元素向量,对元素向量中的元素进行第一类空间平滑,依次选择(la+1)/2个元素作为第一矩阵的列,再对所述第一矩阵进行上下翻转处理,得到对应的目标矩阵;
55、根据所有组元素向量对应的目标矩阵,生成一个目标矩阵向量,所述目标矩阵向量包括lt个目标矩阵;
56、针对目标矩阵向量进行第二类空间平滑,依次选择(lt+1)/2个目标矩阵作为第二矩阵的列,再对所述第二矩阵进行上下翻转处理,得到虚拟协方差矩阵rv。
57、进一步的,所述music算法包括如下步骤:
58、对虚拟协方差矩阵rv进行特征分解,进而得到music算法的二维功率谱;所述二维功率谱的表达式如下:
59、
60、式中,pmusic(τ,α)表示二维功率谱;bv(τ,α)表示传输时延τ和第一角度α的联合转向矢量,表示为:bv(τ)表示任意网格值对应的时延转向矢量,bv(α)表示任意网格值对应的第一角度转向矢量,un表示噪声子空间;
61、在二维功率谱中进行峰值搜索,第m个峰值对应的传输时延和第一角度分别为第m个入射信号的传输时延估计值和第一角度估计值
62、进一步的,所述基于欧式距离的网格估计法,包括:
63、根据music算法中的二维功率谱设置的角度网格,生成一个估计角度网格;
64、将所述估计角度网格的每个网格点的数值与传输时延估计值和第一角度估计值相结合,构造网格协方差矩阵;
65、计算每一个网格点的网格协方差矩阵与交叉协方差矩阵的欧式距离,取最小的欧式距离值对应的网格点值为第二角度估计值。
66、与现有技术相比,本发明所达到的有益效果:
67、本发明的基于空频嵌套阵列移动的时延和二维角度联合估计方法,在移动平台上构建线性嵌套传感器阵列,不仅能够以一维阵列实现二维角度的估计,节约了空间资源,而且将时延/二维角度的联合估计分解为两次低维估计,使得计算复杂度大大降低,并且所有的估计参数自动配对。空频嵌套阵列的选择不仅能够节约物理成本和计算资源,还保证所有非冗余数据都能够被利用。同时,基于欧式距离的网格估计法进一步保证二维角度估计精度。
- 还没有人留言评论。精彩留言会获得点赞!