一种基于FMCW激光雷达检测离散介质的方法、系统及介质与流程
本发明涉及激光雷达,尤其是涉及一种基于fmcw激光雷达检测离散介质的方法、系统及介质。
背景技术:
1、随着自主开发技术日趋成熟,基于激光雷达的自动驾驶技术逐渐成为现实,并且已经开始搭载应用到实车产品上。基于当前自动驾驶领域覆盖场景逐渐增多的情况下,针对矿区、雨季较长等地区下的场景中产生的灰尘、雨雾等离散状态障碍物对于激光雷达的检测产生不可避免的影响。
2、基于目前使用到比较多的雷达多为tof工作原理, 即通过测量发射波脉冲与目标回波脉冲之间的时间间隔,需要通过多重算法推算来获取目标距离并结合前后帧障碍物移动距离得到速度信息。仅靠三维坐标与强度信息来识别离散障碍物无法完全明确整体识别效果。
3、基于目前使用到比较多的雷达多为tof制式激光雷达,fmcw激光雷达将调频连续波测距与激光探测技术相结合,拥有测距范围远、多普勒测速、距离分辨率高,采用线性调频的信号来对激光发射器的激光进行线性频率调制,利用频率与距离之间的对应关系得出障碍物的距离与速度信息,通过其获取障碍物多普勒速度信息的能力,针对车辆行驶过程中遇到的雨雾以及灰尘等离散介质可通过检测其离散程度以及速度状态来区分此类障碍物是否可直接穿行。大幅提升对周边障碍物的敏感性。
技术实现思路
1、鉴于以上问题,本发明提供了一种基于fmcw激光雷达检测离散介质的方法、系统及介质,不仅能够对车辆行驶过程中的雨雾以及灰尘等离散介质进行准确的检测,而且进一步保证了车辆行驶过程的安全性。
2、为了实现上述目的及其他相关目的,本发明提供的技术方案如下:
3、一种基于fmcw激光雷达检测离散介质的方法,所述方法包括:
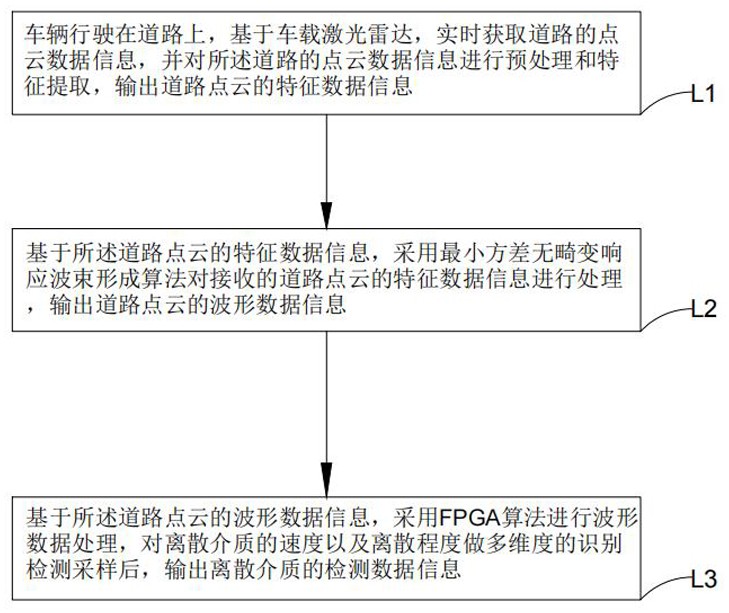
4、l1.车辆行驶在道路上,基于车载激光雷达,实时获取道路的点云数据信息,并对所述道路的点云数据信息进行预处理和特征提取,输出道路点云的特征数据信息;
5、l2.基于所述道路点云的特征数据信息,采用最小方差无畸变响应波束形成算法对接收的道路点云的特征数据信息进行处理,输出道路点云的波形数据信息;
6、l3.基于所述道路点云的波形数据信息,采用fpga算法进行波形数据处理,对离散介质的速度以及离散程度做多维度的识别检测采样后,输出离散介质的检测数据信息。
7、进一步的,所述预处理包括去除噪音、填补缺失数据和移除异常点,所述填补缺失数据为对离散点云进行采样和插值,点云数据在空间上连续,并采用曲面拟合算法得到离散点云的三维模型的形状。
8、进一步的,所述特征提取为采用边缘检测算法对道路的点云数据信息进行处理。
9、进一步的,在步骤l2中,所述采用最小方差无畸变响应波束形成算法对接收的道路点云的特征数据信息进行处理包括:
10、l21.基于所述道路点云的特征数据信息,建立道路点云的特征矩阵函数j,
11、,
12、其中,t为不同时刻,ɑ(t)为道路点云特征x向函数,βi(t)为道路点云的第i个z向特征函数,γ(t)为道路点云特征y向函数,n为采样样本总数;
13、l22.基于所述道路点云的特征矩阵函数j,建立道路点云的波束形成函数h,
14、,
15、其中,w为权重矩阵,wt为权重矩阵的转置矩阵,λj为第j个波束因子矩阵,e为单位矩阵,n为正整数;
16、l23.基于所述道路点云的波束形成函数h,得到道路点云的波形数据信息。
17、进一步的,在步骤l22中,所述权重矩阵w的约束条件为
18、,
19、其中,j为道路点云的特征矩阵函数,w为权重矩阵,e为单位矩阵。
20、进一步的,在步骤l3中,所述采用fpga算法进行波形数据处理包括:
21、l31.基于所述道路点云的波形数据信息,进行复数化处理,并采用傅里叶变换fft处理,得到道路点云的目标峰值数据信息;
22、l32.基于所述道路点云的目标峰值数据信息,采用振幅阈值滤波算法预滤波处理,消除原始噪声后,获取上升沿/下降沿的中频信息,输出离散介质的点云信息;
23、l33.基于所述离散介质的点云信息,采用速度聚类滤波预滤波处理后消除离散截止产生的点云,结合障碍物速度信息,输出离散介质的检测数据信息。
24、进一步的,所述障碍物速度信息为所述离散介质中各离散点的速度数据信息。
25、进一步的,所述采用fpga算法进行波形数据处理还包括:利用调频连续波以及傅里叶变换针对离散介质的速度以及离散程度做多维度的识别检测采样后,从硬件端对于识别检测做初次识别过滤反馈到系统做二次识别过滤。
26、为了实现上述目的及其他相关目的,本发明还提供了一种基于fmcw激光雷达检测离散介质的系统,包括计算机设备,该计算机设备被编程或配置以执行任意一项所述的基于fmcw激光雷达检测离散介质的方法的步骤。
27、为了实现上述目的及其他相关目的,本发明还提供了一种计算机可读存储介质,该计算机可读存储介质上存储有被编程或配置以执行任意一项所述的基于fmcw激光雷达检测离散介质的方法的计算机程序。
28、本发明具有以下积极效果:
29、1.本发明对所述道路的点云数据信息进行预处理和特征提取,并采用最小方差无畸变响应波束形成算法对接收的道路点云的特征数据信息进行处理,不仅能够对车辆行驶过程中的雨雾以及灰尘等离散介质进行准确的检测,而且进一步保证了车辆行驶过程的安全性。
30、2.本发明采用fpga算法进行波形数据处理,对离散介质的速度以及离散程度做多维度的识别检测采样后,不仅能够获取目标的实时距离信息和障碍物离散程度信息,而且优化感知系统对于实际场景的全量化覆盖。
技术特征:
1.一种基于fmcw激光雷达检测离散介质的方法,其特征在于,所述方法包括:
2.根据权利要求1所述的基于fmcw激光雷达检测离散介质的方法,其特征在于:所述预处理包括去除噪音、填补缺失数据和移除异常点,所述填补缺失数据为对离散点云进行采样和插值,点云数据在空间上连续,并采用曲面拟合算法得到离散点云的三维模型的形状。
3.根据权利要求1所述的基于fmcw激光雷达检测离散介质的方法,其特征在于:所述特征提取为采用边缘检测算法对道路的点云数据信息进行处理。
4.根据权利要求1所述的基于fmcw激光雷达检测离散介质的方法,其特征在于,在步骤l2中,所述采用最小方差无畸变响应波束形成算法对接收的道路点云的特征数据信息进行处理包括:
5.根据权利要求4所述的基于fmcw激光雷达检测离散介质的方法,其特征在于,在步骤l22中,所述权重矩阵w的约束条件为
6.根据权利要求1所述的基于fmcw激光雷达检测离散介质的方法,其特征在于,在步骤l3中,所述采用fpga算法进行波形数据处理包括:
7.根据权利要求6所述的基于fmcw激光雷达检测离散介质的方法,其特征在于:所述障碍物速度信息为所述离散介质中各离散点的速度数据信息。
8.根据权利要求6所述的基于fmcw激光雷达检测离散介质的方法,其特征在于,所述采用fpga算法进行波形数据处理还包括:利用调频连续波以及傅里叶变换针对离散介质的速度以及离散程度做多维度的识别检测采样后,从硬件端对于识别检测做初次识别过滤反馈到系统做二次识别过滤。
9.一种基于fmcw激光雷达检测离散介质的系统,包括计算机设备,其特征在于,该计算机设备被编程或配置以执行权利要求1~8中任意一项所述的基于fmcw激光雷达检测离散介质的方法的步骤。
10.一种计算机可读存储介质,其特征在于,该计算机可读存储介质上存储有被编程或配置以执行权利要求1~8中任意一项所述的基于fmcw激光雷达检测离散介质的方法的计算机程序。
技术总结
本发明涉及一种基于FMCW激光雷达检测离散介质的方法、系统及介质,所述方法包括:L1.车辆行驶在道路上,基于车载激光雷达,实时获取道路的点云数据信息,并对所述道路的点云数据信息进行预处理和特征提取,输出道路点云的特征数据信息;L2.基于所述道路点云的特征数据信息,采用最小方差无畸变响应波束形成算法对接收的道路点云的特征数据信息进行处理,输出道路点云的波形数据信息。本发明不仅能够对车辆行驶过程中的雨雾以及灰尘等离散介质进行准确的检测,而且进一步保证了车辆行驶过程的安全性。
技术研发人员:徐子晶,郭铮,石英剑,刘西,王月,黄少文
受保护的技术使用者:东风悦享科技有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!