一种可控制角度的往复扭转疲劳加载系统
本发明涉及加工机械制造,具体为一种可控制角度的往复扭转疲劳加载系统。
背景技术:
1、随着现代工业社会的快速发展,机械的应力越来越高,使用条件越来越恶劣,其中扭转疲劳破坏是很多工业设备中的零部件破坏的主要形式。目前常用的扭转疲劳试验机大多采用步进电机来为实验提供驱动力。步进电机每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。因此,步进电动机又称脉冲电动机。步进电机作为一种开关控制的系统,和现代数字控制技术有着本质的联系。
2、在目前国内的数字控制系统中,步进电机也存在一些劣势。首先,在低速运转的时候容易出现低频振动,所以当步进电机在低速工作时候,通常还需采用阻尼技术来克服低频振动现象。其次,疲劳寿命低,操作系统复杂,不可进行长时间的疲劳加载。最后,几乎所有的扭转试验机都是通过两端固定的方式来夹紧试样,夹持端不对中的问题也普遍存在,这对样品的扭转疲劳实验造成了很多不确定的因素。因此,本文发明提供一种可控制角度的往复扭转疲劳加载系统。
技术实现思路
1、针对现有技术存在的不足,本发明目的是提供一种可控制角度的往复扭转疲劳加载系统,以解决上述背景技术中提出的问题,本发明操作简单,可实现完全对中的往复扭转的疲劳实验,具有同轴度好、单相电机操作简单、性价比高、易于维护的优点。
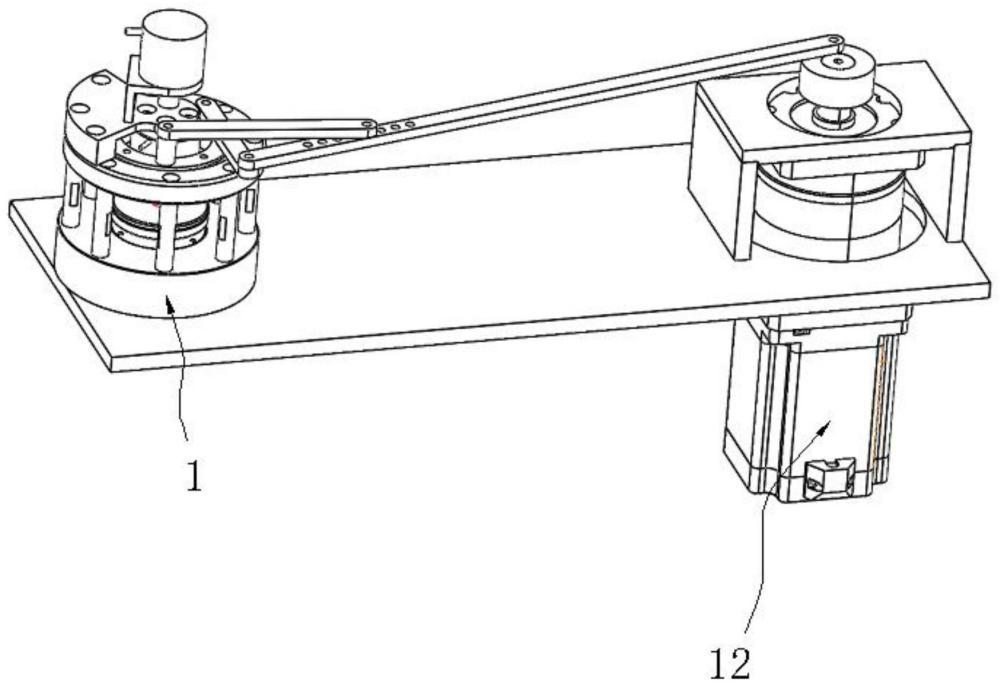
2、为了实现上述目的,本发明是通过如下的技术方案来实现:一种可控制角度的往复扭转疲劳加载系统,所述加载系统包括扭转加载单元和电机驱动单元,且扭转加载单元和电机驱动单元之间设置有连接机构,所述扭转加载单元的底部安装有圆形法兰盘底座,所述电机驱动单元包括单相步进电机、减速机和偏心轮,所述连接机构包括连接杆a、连接杆b、连接杆c,扭转加载单元和电机驱动单元的底部均固定在加载平台上,所述单相步进电机、减速机均通过外部的数控程序控制器进行调节控制。
3、进一步的,所述圆形法兰盘底座的中间安装有压力传感器,且压力传感器的表面设置有扭转夹具底座,所述圆形法兰盘底座的表面侧边安装有多个轴向导柱。
4、进一步的,所述扭转夹具底座的顶部中间嵌装有待测样品,所述待测样品的顶部设置有法兰盘压盘,所述轴向导柱的顶部设置有交叉圆柱滚子轴承。
5、进一步的,所述交叉圆柱滚子轴承的中间安装有扭力传感器,所述交叉圆柱滚子轴承的顶部安装有角度连接器,所述角度连接器的顶部设置有安装板,且安装板的侧边设置有第二扭力传感器。
6、进一步的,所述交叉圆柱滚子轴承包括内圈和外圈,且内圈和外圈相互配合,外圈通过轴向导柱与圆形法兰盘底座连接。
7、进一步的,所述轴向导柱设置有八个,且加载过程中外圈固定不动,内圈在连接机构的作用下进行往复扭转。
8、进一步的,所述减速机安装在单相步进电机的顶部,且减速机的输出轴上安装有偏心轮。
9、进一步的,所述单相步进电机通过中间的减速机将扭矩传递到最上端的偏心轮上,所述减速机的减速比为10。
10、进一步的,所述连接杆c的表面开设有多个角度调节孔,且连接杆c通过角度调节孔与连接杆b进行组合连接。
11、进一步的,所述连接杆c的末端与连接杆a进行连接,且连接杆a、连接杆b均与扭转加载单元进行联动。
12、本发明的有益效果:
13、1.本发明具有更好的同轴度,加载时,样品同轴度好,样品上下两端放置于两个对称设计的法兰盘之间,通过螺纹连接固定。通过调整螺纹锁紧的高度来改变样品的轴向压缩应变的大小。螺纹刻有类似于千分尺的精确尺度。
14、2.该可控制角度的往复扭转疲劳加载系统通过单相电机控制加载,只需设定好偏转角度和往复循环次数即可。单相电机在启动过程中非常顺畅,降低了由剧烈启动引起的机械振动。此外,由于单相电机不需要用到高压电源,这使得单相电机的温度非常低。因此,在适当的维护下,它可以在更长的时间内运行。
15、3.该可控制角度的往复扭转疲劳加载系统所采用的单相电机相比于多相步进电机而言,单相电机在设计和制造上非常简单,因此价格相对较低。与三相电机相比,它对于小型机器和设备来说是一种更经济实惠且可靠的解决方案;与三相电机相比,单相电机安装和维护非常容易。由于单相电机具有与家庭用电相似的220v电源,因此无需进行专业的电气安装。此外,如果一个部分需要替换,单相电机的结构相对简单,这使得更换零件比三相电机更容易。
技术特征:
1.一种可控制角度的往复扭转疲劳加载系统,其特征在于:所述加载系统包括扭转加载单元和电机驱动单元,且扭转加载单元和电机驱动单元之间设置有连接机构,所述扭转加载单元的底部安装有圆形法兰盘底座(1),所述电机驱动单元包括单相步进电机(12)、减速机(13)和偏心轮(14),所述连接机构包括连接杆a(15)、连接杆b(16)、连接杆c(18),扭转加载单元和电机驱动单元的底部均固定在加载平台(19)上,所述单相步进电机(12)、减速机(13)均通过外部的数控程序控制器进行调节控制。
2.根据权利要求1所述的一种可控制角度的往复扭转疲劳加载系统,其特征在于:所述圆形法兰盘底座(1)的中间安装有压力传感器(2),且压力传感器(2)的表面设置有扭转夹具底座(3),所述圆形法兰盘底座(1)的表面侧边安装有多个轴向导柱(4)。
3.根据权利要求2所述的一种可控制角度的往复扭转疲劳加载系统,其特征在于:所述扭转夹具底座(3)的顶部中间嵌装有待测样品(5),所述待测样品(5)的顶部设置有法兰盘压盘(6),所述轴向导柱(4)的顶部设置有交叉圆柱滚子轴承(7)。
4.根据权利要求3所述的一种可控制角度的往复扭转疲劳加载系统,其特征在于:所述交叉圆柱滚子轴承(7)的中间安装有第一扭力传感器(8),所述交叉圆柱滚子轴承(7)的顶部安装有角度连接器(9),所述角度连接器(9)的顶部设置有安装板(10),且安装板(10)的侧边设置有第二扭力传感器(11)。
5.根据权利要求3所述的一种可控制角度的往复扭转疲劳加载系统,其特征在于:所述交叉圆柱滚子轴承(7)包括内圈和外圈,且内圈和外圈相互配合,外圈通过轴向导柱(4)与圆形法兰盘底座(1)连接。
6.根据权利要求5所述的一种可控制角度的往复扭转疲劳加载系统,其特征在于:所述轴向导柱(4)设置有八个,且加载过程中外圈固定不动,内圈在连接机构的作用下进行往复扭转。
7.根据权利要求1所述的一种可控制角度的往复扭转疲劳加载系统,其特征在于:所述减速机(13)安装在单相步进电机(12)的顶部,且减速机(13)的输出轴上安装有偏心轮(14)。
8.根据权利要求7所述的一种可控制角度的往复扭转疲劳加载系统,其特征在于:所述单相步进电机(12)通过中间的减速机(13)将扭矩传递到最上端的偏心轮(14)上,所述减速机(13)的减速比为10。
9.根据权利要求1所述的一种可控制角度的往复扭转疲劳加载系统,其特征在于:所述连接杆c(18)的表面开设有多个角度调节孔(17),且连接杆c(18)通过角度调节孔(17)与连接杆b(16)进行组合连接。
10.根据权利要求9所述的一种可控制角度的往复扭转疲劳加载系统,其特征在于:所述连接杆c(18)的末端与连接杆a(15)进行连接,且连接杆a(15)、连接杆b(16)均与扭转加载单元进行联动。
技术总结
本发明提供一种可控制角度的往复扭转疲劳加载系统,该加载系统在扭转加载单元和电机驱动单元之间设置有连接机构,所述扭转加载单元的底部安装有圆形法兰盘底座,所述电机驱动单元包括单相步进电机、减速机和偏心轮,所述连接机构包括连接杆A、连接杆B、连接杆C,扭转加载单元和电机驱动单元的底部均固定在加载平台上,该往复扭转疲劳加载系统具有更好的同轴度,样品上下两端放置于两个对称设计的法兰盘之间,通过螺纹连接固定,操作简单,可实现完全对中的往复扭转的疲劳实验,通过单相电机控制加载,只需设定好偏转角度和往复循环次数即可,同时单相电机在启动过程中非常顺畅,降低了由剧烈起动引起的机械振动。
技术研发人员:汪秋红,尹颢,李逸帆,陈文章
受保护的技术使用者:武汉大学
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!