基于数学启发式的道路积尘走航监测车辆路线规划方法与流程
本发明涉及道路积尘走航监测,具体涉及一种基于数学启发式的道路积尘走航监测车辆路线规划方法。
背景技术:
1、为了进一步规范道路清洁作业,强化道路扬尘污染的源头追溯,有效抑制城市道路扬尘污染,各地逐步采用道路积尘走航监测系统代替了过去的手工检测,在节约人力成本的同时,可以进一步提高监测效果。
2、道路积尘走航监测系统由专用车辆搭载监测传感器,利用传感器对大气信息进行采集并实时传输至在线平台。该道路积尘移动监测车可以在车辆运行过程中快速和实时地对不同类型道路和不同路段进行监控。然而,该监测车辆的购买和运行成本非常高,那么如何在给定成本下根据不同的监测需求合理规划不同车次的运行路线是一个亟待解决的问题。
技术实现思路
1、针对现有技术中的上述不足,本发明提供了一种基于数学启发式的道路积尘走航监测车辆路线规划方法,通过结合道路扬尘污染的监测需求合理规划道路积尘走航监测车辆不同车次的运行方案,提高道路积尘走航车辆调度效率。
2、为了达到上述发明目的,本发明采用的技术方案为:
3、一种基于数学启发式的道路积尘走航监测车辆路线规划方法,包括以下步骤:
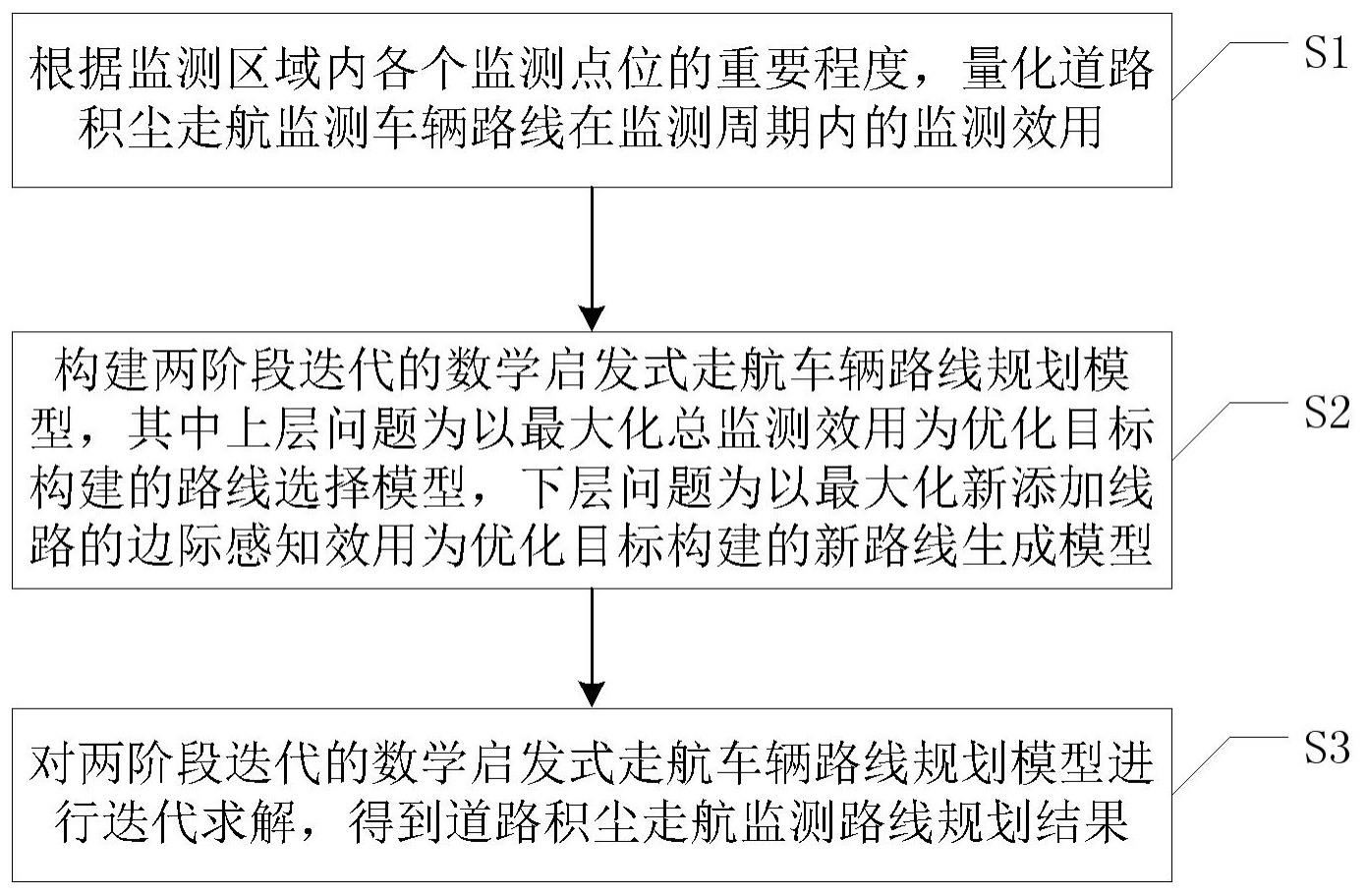
4、s1、根据监测区域内各个监测点位的重要程度,量化道路积尘走航监测车辆路线在监测周期内的监测效用;
5、s2、构建两阶段迭代的数学启发式走航车辆路线规划模型,其中上层问题为以最大化总监测效用为优化目标构建的路线选择模型,下层问题为以最大化新添加线路的边际感知效用为优化目标构建的新路线生成模型;
6、s3、对两阶段迭代的数学启发式走航车辆路线规划模型进行迭代求解,得到道路积尘走航监测路线规划结果。
7、进一步地,步骤s1具体包括以下步骤:
8、s11、根据监测区域内各个监测点位的重要程度,设定各个监测点位的监测权重;
9、s12、根据各个监测点位的监测权重和各个监测点位在监测周期内被访问的次数,量化道路积尘走航监测车辆路线在监测周期内的监测效用。
10、进一步地,量化道路积尘走航监测车辆路线在监测周期内的监测效用的方法为:
11、
12、其中,表示路线在监测周期内的监测效用,表示监测点位 i的监测权重, i表示监测点位集合, qi表示监测点位 i在监测周期内被访问的次数, β表示约束参数。
13、进一步地,步骤s2中以最大化总监测效用为优化目标构建的路线选择模型具体包括以下步骤:
14、s21、采用贪心策略初始化道路积尘走航监测车辆的候选路线列表;
15、s22、以最大化道路积尘走航监测车辆在监测周期内的总监测效用作为路线选择优化目标,以车辆数或者车次数作为路线选择约束条件,构建路线选择模型。
16、进一步地,所述路线选择优化目标具体为:
17、
18、其中,max表示最大化函数,表示路线在监测周期内的监测效用,表示监测点位 i的监测权重, i表示监测点位集合, qi表示监测点位 i在监测周期内被访问的次数, β表示约束参数,表示道路积尘走航监测车辆 k是否选择路线 r的0-1变量, k表示道路积尘走航监测车辆集合, r表示路线集合。
19、进一步地,所述路线选择约束条件具体为:
20、
21、
22、
23、其中,表示路线 r是否覆盖监测点位 i的0-1变量,表示候选路线列表中的路线数量。
24、进一步地,步骤s2中以最大化新添加线路的边际感知效用为优化目标构建的新路线生成模型具体包括以下步骤:
25、s23、生成一条新路线,添加到路线选择模型中道路积尘走航监测车辆的候选路线列表;
26、s24、确定道路积尘走航监测车辆选择新路线对所覆盖监测点位的边际增益;
27、s25、以最大化新路线覆盖监测点位的边际增益作为新线路生成优化目标,以每个监测点位最多被覆盖一次作为新线路生成约束条件,构建新路线生成模型。
28、进一步地,所述新线路生成优化目标具体为:
29、
30、其中,表示道路积尘走航监测车辆选择新路线对所覆盖监测点位 i的边际增益,表示新路线是否覆盖监测点位 i的0-1变量, i表示监测点位集合,表示新路线是否从监测点位 i运行到监测点位 j的0-1变量。
31、进一步地,所述新线路生成约束条件具体为:
32、
33、
34、
35、
36、
37、其中,表示新线路从起点出发后经过的第一个监测点位是否为监测点位 i的0-1变量,表示新线路经过监测点位 i后是否返回终点的0-1变量,表示新路线是否从监测点位 i运行到监测点位 l的0-1变量,表示新路线是否从监测点位 l运行到监测点位 j的0-1变量,表示从监测点位 i运行到监测点位 j的时间成本,表示设定的时间预算,表示监测点位 i在新线路中的次序,表示监测点位 j在新线路中的次序, n表示有效监测点位的数量。
38、进一步地,步骤s3具体包括以下步骤:
39、s31、随机初始化路线选择模型的候选路线列表、最优目标值、未改进的迭代次数和迭代终止参数;
40、s32、对路线选择模型进行求解,根据路线选择结果对各个道路积尘走航监测车辆分配路线,并记录当前的优化目标值;
41、s33、根据各个道路积尘走航监测车辆分配路线更新每个监测点位的边际增益;
42、s34、根据每个监测点位的边际增益对新路线生成模型进行求解,根据新线路生成结果将新路线添加到候选路线列表中;
43、s35、判断当前的优化目标值是否大于最优目标值;若是,则根据当前的优化目标值更新最优目标值,并重置未改进的迭代次数;否则将未改进的迭代次数递增;
44、s36、判断未改进的迭代次数是否小于迭代终止参数;若是,则跳转至步骤s32;否则流程结束。
45、本发明具有以下有益效果:
46、(1)本发明可以在较短时间内快速规划一个监测周期内道路积尘走航监测车辆不同车次的运行路线,提高了道路积尘走航监测车辆路线规划效率和有效性,从而能够更好地满足监测需求;
47、(2)本发明可以适用于不同监测需求场景下的道路积尘走航监测车辆的路线规划解决方案,应用前景和应用范围均十分广阔。
- 还没有人留言评论。精彩留言会获得点赞!