一种半球谐振陀螺仪的正交误差控制方法与流程
本发明涉及半球谐振陀螺仪的,具体涉及一种半球谐振陀螺仪的正交误差控制方法。
背景技术:
1、半球谐振陀螺仪是一种常用的惯性导航器件,用于测量和控制飞行器、船舶等的姿态;它是利用谐振共振的特性来感知旋转运动。当陀螺仪受到旋转运动时,球体内部的质量会受到离心力的作用而发生微小的位移。这个位移会引起球体的共振频率发生变化,通过测量共振频率的变化,可以计算出陀螺仪所受到的旋转速度。但在使用过程中,会存在一些误差,其中正交误差是指陀螺仪输出信号中由于姿态变化引起的误差。
2、正交误差是指陀螺仪在理想情况下应该输出为零的信号,在实际测量中产生的非零误差。这种误差可能是由陀螺仪内部的装配误差、材料不均匀性等因素引起的。正交误差会导致陀螺仪输出的信号与实际旋转轴不对齐,进而影响测量结果的准确性。
3、在测量领域中,温度变化是导致测量仪器输出数据产生正交误差的主要原因之一,这种误差会影响测量结果的准确性和可信度,尤其在高精度测量和关键应用领域更为突出。这是因为温度变化会引起陀螺仪内部元件的物理性质发生变化,从而导致输出信号的偏移,并且当温度补偿错误时,补偿算法可能无法准确地校正温度引起的偏移,这会导致陀螺仪的输出信号与实际的旋转轴发生偏差。这种轴向错位可能会导致测量误差的增加,从而影响陀螺仪的准确性和稳定性。
4、在飞机在穿越云层时,则会出现从高温区域飞行到低温区域,或者低温区域飞行到高温区域的情况,这是由于云层内的辐射作用、大气层结和湿度的相变等因素共同作用下,使得温差较大,则温度变化速度快。例如,当飞机从炎热的地面上升到高空时,温度会迅速下降。在这种情况下,温度传感器需要一定的时间来感知和测量温度的变化。如果温度变化速度非常快,传感器的响应时间可能变得相对较慢,无法实时准确地反映温度的变化,温度补偿算法可能无法及时跟踪温度的变化,从而导致温度补偿不准确。特别是如果陀螺仪的响应速度相对较慢,或者温度变化幅度较大,就更容易出现温度补偿错误。
技术实现思路
1、本发明目的在于提供一种半球谐振陀螺仪的正交误差控制方法,用于解决飞机在飞行时,飞机在穿越云层的过程中,由于云层内的辐射作用、大气层结和湿度的相变等因素共同作用下,使得温差较大,则温度变化速度快,从而导致温度补偿不准确的问题。
2、本发明通过下述技术方案实现:
3、一种半球谐振陀螺仪的正交误差控制方法,包括以下步骤:
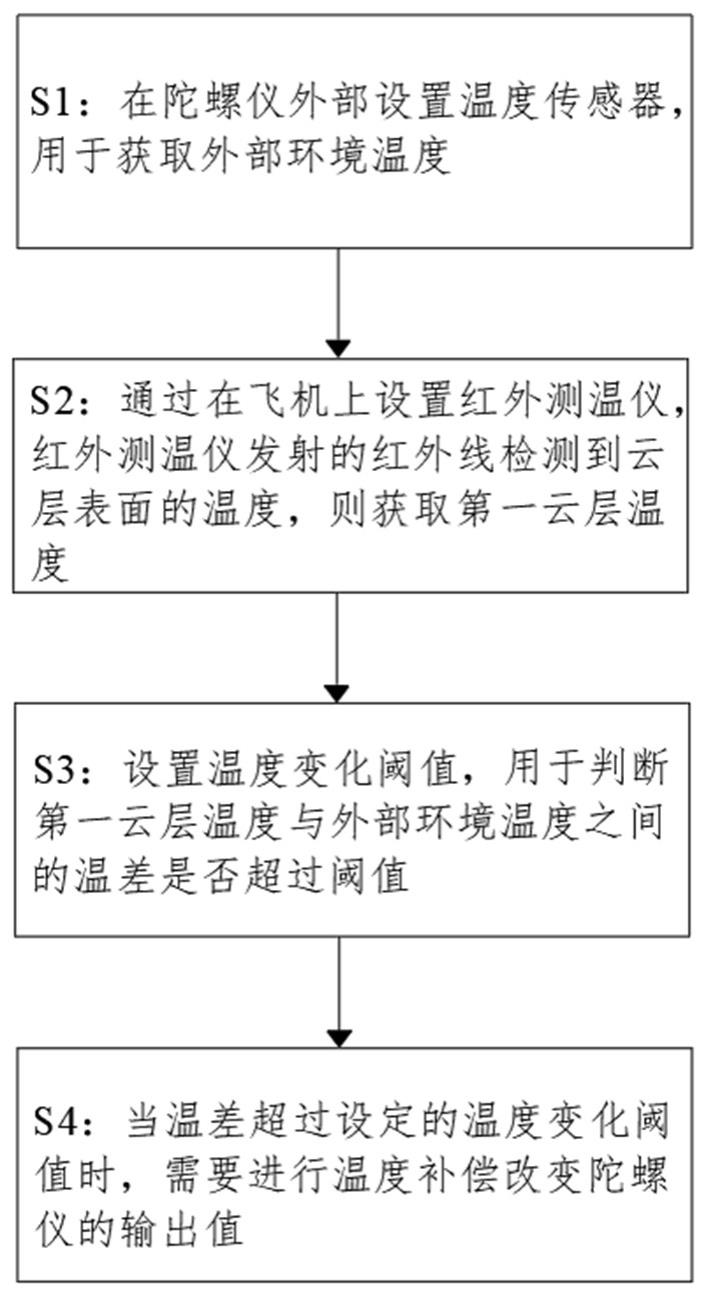
4、s1:在陀螺仪外部设置温度传感器,用于获取外部环境温度;
5、s2:通过在飞机上设置红外测温仪,红外测温仪发射的红外线检测到云层表面的温度,则获取第一云层温度;
6、s3:设置温度变化阈值,用于判断第一云层温度与外部环境温度之间的温差是否超过阈值;
7、s4:当温差超过设定的温度变化阈值时,需要进行温度补偿改变陀螺仪的输出值。
8、进一步地,步骤s4还包括以下子步骤:
9、s4.1:当温差超过设定的温度变化阈值时,通过加权平均算法算出外部环境温度与第一云层温度之间的平均温度;
10、s4.2:通过温度补偿算法将陀螺仪的输出值补偿至平均温度值。
11、进一步地,步骤s4.2还包括以下步骤:
12、s4.2.1:通过飞机上设置雷达,运用雷达的高度计算方法发送射频信号并接收反射信号,计算陀螺仪与云层之间的距离,获取距离数据;
13、s4.2.2:获取飞机此时的速度值,将距离数据除以飞机的速度值,得到飞机到云层所需要的总时间;
14、s4.2.3:将总时间均分为若干时间段,将平均温度值均分到每个时间段上,使得温度补偿算法将在每个时间段上补偿相应的平均温度值。
15、进一步地,还包括以下步骤:
16、s5:通过飞机上设置的雷达系统发射无线电波脉冲来检测云层内部的温度;
17、s6:选择飞机在航线上需要经过的云层区域的温度,则获取第二云层温度,通过加权平均算法算出第一云层温度和第二云层温温度的平均温度值;
18、s7:计算出云层表面到云层内部之间的距离,通过获取飞机此时的速度值,将距离数据除以飞机的速度值,得到飞机到云层内部所需要的总时间;
19、s8:将总时间均分为若干时间段,将平均温度值均分到每个时间段上,使得温度补偿算法将在每个时间段上补偿相应的平均温度值。
20、本发明与现有技术相比,具有如下的优点和有益效果:
21、本申请通过设置温度变化阈值,判定温差变化大小,若温差较小,则正常进行工作,若温差较大,则超过设定的温度变化阈值,需要提前进行温度补偿来改变陀螺仪的输出,从而解决由于飞机飞行速度较快,若飞机根据航线飞行至已检测的云层位置,则温度变化速度非常快,传感器的响应时间可能变得相对较慢,无法实时准确地反映温度的变化,温度补偿算法可能无法及时跟踪温度的变化,从而导致温度补偿不准确的问题;通过计算外部环境温度与第一云层温度之间的平均温度值,温度补偿算法可以更准确地根据实际温度变化对陀螺仪的输出值进行补偿。这有助于减小因为提前进行补偿而基于错误温度值进行补偿带来的偏差,提高飞机的姿态和运动状态的准确度;并且引入平均温度值进行补偿,可以减小温度变化对陀螺仪的影响,并避免过度修正引起的不稳定性。这有助于提高飞行控制系统的稳定性,确保飞机的控制和导航在云层条件下的稳定性。
技术特征:
1.一种半球谐振陀螺仪的正交误差控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种半球谐振陀螺仪的正交误差控制方法,其特征在于,步骤s4还包括以下子步骤:
3.根据权利要求2所述的一种半球谐振陀螺仪的正交误差控制方法,其特征在于,步骤s4.2还包括以下步骤:
4.根据权利要求3所述的一种半球谐振陀螺仪的正交误差控制方法,其特征在于,还包括以下步骤:
技术总结
本发明涉及半球谐振陀螺仪的技术领域,具体涉及一种半球谐振陀螺仪的正交误差控制方法,包括以下步骤:S1:在陀螺仪外部设置温度传感器,用于获取外部环境温度;S2:通过在飞机上设置红外测温仪,红外测温仪发射的红外线检测到云层表面的温度,则获取第一云层温度;S3:设置温度变化阈值,用于判断第一云层温度与外部环境温度之间的温差是否超过阈值;S4:当温差超过设定的温度变化阈值时,需要进行温度补偿改变陀螺仪的输出值;解决了由于飞机飞行速度较快,若根据航线飞行至已检测的云层位置时,则温度变化速度非常快,传感器的响应时间可能变得相对较慢,无法实时准确地反映温度的变化的问题。
技术研发人员:李永德
受保护的技术使用者:四川图林科技有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!