一种管道直线度测量方法及测量系统与流程
本发明涉及管道直线度测量领域,尤其涉及一种管道直线度测量方法及测量系统。
背景技术:
1、目前管道直线度测量方法主要有:1、机械接触式,例如量规法和杠杆法,缺点是精度不高,自动化程度较低。2、光轴法,例如准直望远镜法,激光束加面阵相机法等,光轴法的优点是测量原理符合直线度定义,精度较高,缺点是安装调整不方便,易引入人为误差,精度低。
技术实现思路
1、本发明为一种管道直线度测量方法及测量系统,能够解决现有技术中对管道的直线度进行测量时的精度低的技术问题。
2、为实现上述的目的,本发明第一方面提供了一种管道直线度测量方法,包括:
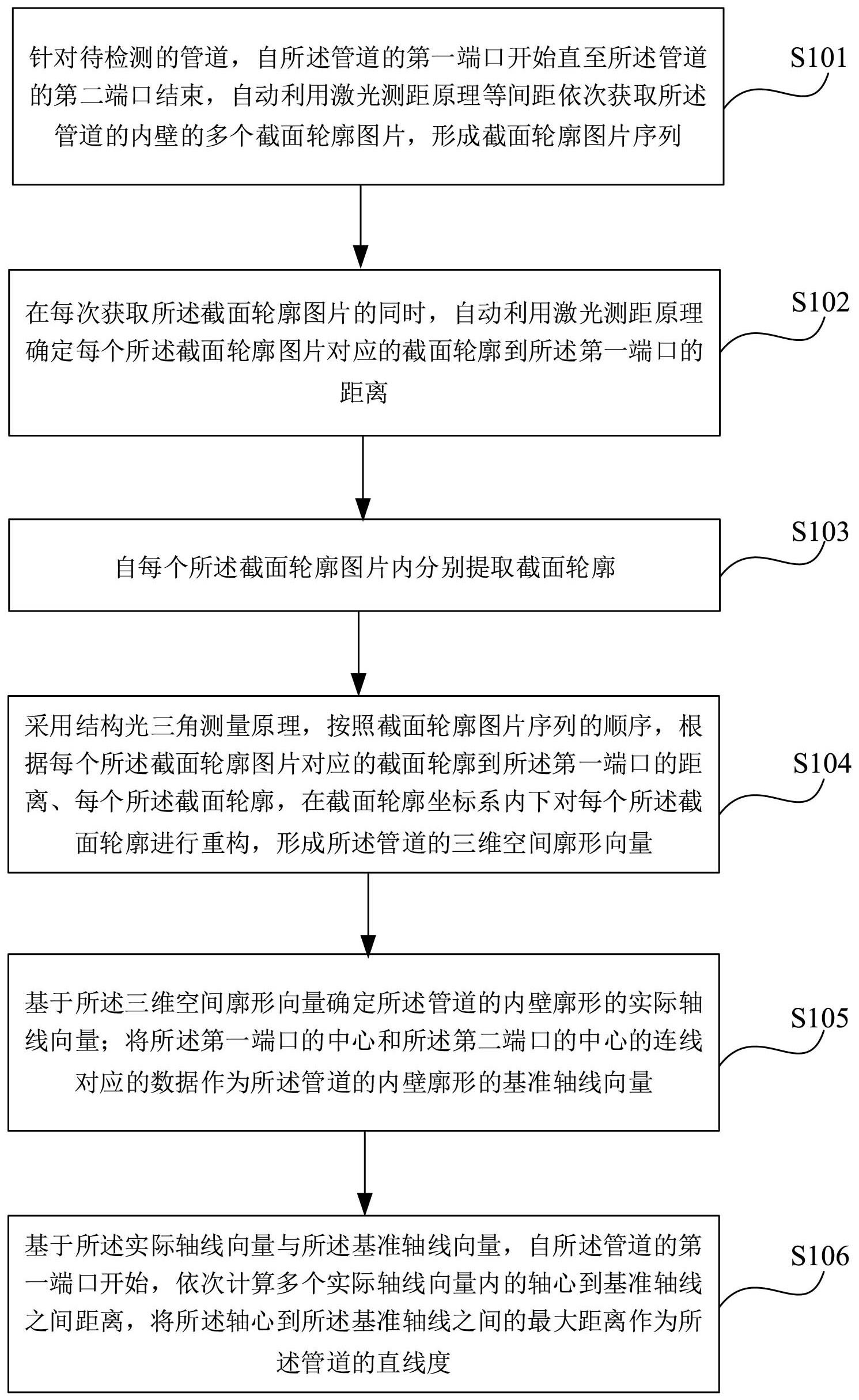
3、针对待检测的管道,自管道的第一端口开始直至管道的第二端口结束,自动利用激光测距原理等间距依次获取管道的内壁的多个截面轮廓图片,形成截面轮廓图片序列;其中,多个截面轮廓图片包括第一端口的截面轮廓图片和第二端口截面轮廓图片;
4、在每次获取截面轮廓图片的同时,自动利用激光测距原理确定每个截面轮廓图片对应的截面轮廓到第一端口的距离;
5、自每个截面轮廓图片内分别提取截面轮廓;
6、采用结构光三角测量原理,按照截面轮廓图片序列的顺序,根据每个截面轮廓图片对应的截面轮廓到第一端口的距离、每个截面轮廓,在截面轮廓坐标系内下对每个截面轮廓进行重构,形成管道的三维空间廓形向量;
7、基于三维空间廓形向量确定管道的内壁廓形的实际轴线向量;将第一端口的中心和第二端口的中心的连线对应的数据作为管道的内壁廓形的基准轴线向量;
8、基于实际轴线向量与基准轴线向量,自管道的第一端口开始,依次计算多个轴心到基准轴线之间距离,将实际轴线向量内的轴心到基准轴线之间的最大距离作为管道的直线度;其中,相邻的轴心等间距设置。
9、作为本发明的第二个方面,本发明提供了一种管道直线度测量系统,包括运行于管道内壁的行走机构以及驱动行走机构的动力装置,动力装置连接于行走控制器;
10、还包括:相机,相机固定于行走机构上;
11、还包括:用于向管道的内壁发射环形激光线9的圆环形激光器,圆环形激光器连接于行走机构且处于相机的镜头与管道的第一端口之间,圆环形激光器与镜头保持固定距离;
12、还包括:用于数据处理的计算机,计算机电连接于相机;行走控制器还连接于计算机;
13、还包括:激光测距仪,激光测距仪设于管道外,且对准第一端口。
14、本发明的优势效果:利用激光测距原理分别获取管道的内壁的多个截面轮廓图片,以及截面轮廓图片对应的截面轮廓到所述第一端口的距离;采用结构光三角测量原理,按照所述截面轮廓图片序列的顺序,根据每个所述截面轮廓图片对应的截面轮廓到所述第一端口的距离、每个所述截面轮廓,形成所述管道的三维空间廓形向量;根据三维空间廓形向量能够确定管道15的内壁廓形的实际轴线向量;基于实际轴线向量与基准轴线向量就能够确定轴心到所述基准轴线之间的最大距离作为所述管道的直线度。利用结构光三角测量原理进行测量,三维空间廓形向量的数值精度高,可达0.1mm,则最终的直线度精度也非常高,可达0.1mm。
技术特征:
1.一种管道直线度测量方法,其特征在于,包括:
2.根据权利要求1所述的管道直线度测量方法,其特征在于,所述自所述管道(15)的第一端口(151)开始直至所述管道(15)的第二端口(152)结束,自动利用激光测距原理等间距依次获取所述管道(15)的内壁的多个截面轮廓图片,形成截面轮廓图片序列,具体包括:
3.根据权利要求2所述的管道直线度测量方法,其特征在于,所述在每次获取所述截面轮廓图片的同时,自动利用激光测距原理确定每个所述截面轮廓图片对应的截面轮廓到所述第一端口(151)的距离,具体包括:
4.根据权利要求3所述的管道直线度测量方法,其特征在于,所述采用结构光三角测量原理,按照所述截面轮廓图片序列的顺序,根据每个所述截面轮廓图片对应的截面轮廓到所述第一端口(151)的距离、每个所述截面轮廓,在截面轮廓坐标系内对每个所述截面轮廓进行重构,形成所述管道(15)的三维空间廓形向量,具体包括:
5.根据权利要求4所述的管道直线度测量方法,其特征在于,还包括:
6.根据权利要求5所述的管道直线度测量方法,其特征在于,还包括:
7.一种管道直线度测量系统,其特征在于,包括运行于管道(15)内壁的行走机构(2)以及驱动所述行走机构(2)的动力装置(14),所述动力装置(14)连接于行走控制器(17);
8.根据权利要求7所述的管道直线度测量系统,其特征在于,还包括点激光器(11)和反射所述点激光器(11)发射的点激光线(10)的半透明的反射板(8),所述点激光器(11)设于所述管道(15)外,且所述点激光器(11)对准所述第一端口(151);所述反射板(8)设于所述镜头(4)与发射在所述管道(15)内壁上的所述环形激光线(9)之间。
9.根据权利要求8所述的管道直线度测量系统,其特征在于,还包括沿所述管道(15)轴向设置的支撑玻璃板(5),所述支撑玻璃板(5)连接于所述行走机构(2),所述圆环形激光器(7)和所述反射板(8)分别支撑于所述支撑玻璃板(5)上。
技术总结
本发明提供一种管道直线度测量方法及测量系统,涉及管道直线度测量领域,测量方法包括:自第一端口直至管道的第二端口,利用激光测距原理等间距依次获取管道的内壁的多个截面轮廓图片,提取截面轮廓;利用激光测距原理确定每个截面轮廓到第一端口的距离;采用结构光三角测量原理,形成管道的三维空间廓形向量;确定管道的内壁廓形的实际轴线向量;将第一端口的中心和第二端口的中心的连线作为管道的内壁廓形的基准轴线向量;将实际轴线向量内的轴心到基准轴线之间的最大距离作为管道的直线度。利用激光测距原理进行测量,采用结构光三角测量原理进行重构截面轮廓,得到高精度的直线度。
技术研发人员:胡柳,胡新洲,杨寰宇,王正强,蔡光海,张建南,曹动
受保护的技术使用者:湖南科天健光电技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!