挡墙检测方法和挡墙检测装置、存储介质与流程
本申请涉及智慧矿山、自动驾驶以及无人车,具体涉及一种挡墙检测方法和挡墙检测装置、存储介质。
背景技术:
1、近年来,随着智能科技的迅速发展,智慧矿山日益受到更多关注。智慧矿山是以矿山数字化、信息化为基础,实现以无人值守采矿技术为代表的安全矿山、无人矿山。众所周知,矿区作业环境恶劣,且需要全天候的运作,因此,自动驾驶技术成为智慧矿山的重点支撑技术,利用自动驾驶车辆执行排土任务成为智慧矿山的重要作业任务。
2、在执行排土任务时,自动驾驶车辆需要驶入排土位,并精确地停靠至挡墙附近。然而,矿区地形具有非结构化、以及动态变化等特点,且大多数情况下,排土位局部地形变化较大且土堆较多,因此,传统的挡墙检测方法难以精准检测矿区的挡墙的位置,进而存在安全隐患。
技术实现思路
1、有鉴于此,本申请提供一种挡墙检测方法和挡墙检测装置、存储介质。
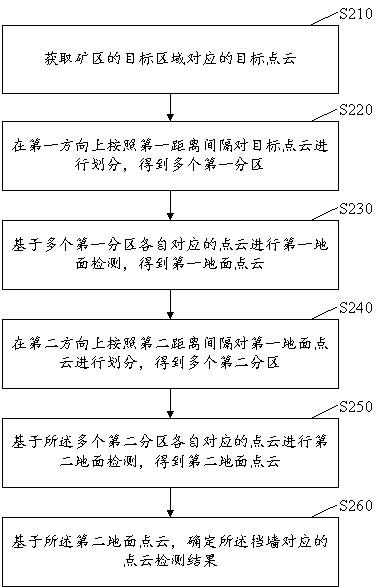
2、第一方面,提供一种挡墙检测方法,包括:获取矿区的目标区域对应的目标点云;在第一方向上按照第一距离间隔对目标点云进行划分,得到多个第一分区,第一方向为目标区域内挡墙纵向延伸的方向;基于多个第一分区各自对应的点云进行第一地面检测,得到第一地面点云;在第二方向上按照第二距离间隔对第一地面点云进行划分,得到多个第二分区,第二方向为目标区域内挡墙横向延伸的方向;基于多个第二分区各自对应的点云进行第二地面检测,得到第二地面点云;基于第二地面点云,确定挡墙对应的点云检测结果。
3、结合第一方面,在第一方面的某些实现方式中,基于多个第二分区各自对应的点云进行第二地面检测,得到第二地面点云,包括:基于多个第二分区各自对应的点云,确定多个第二分区各自对应的点云在第二方向上的最大值和最小值之间的差值;确定差值达到差值阈值的第二分区,并根据差值达到差值阈值的第二分区对应的点云确定第二地面点云。
4、结合第一方面,在第一方面的某些实现方式中,根据差值达到差值阈值的第二分区对应的点云确定第二地面点云,包括:确定差值达到差值阈值的第二分区的数量;根据数量,计算得到差值达到差值阈值的第二分区沿第一方向的总长度;根据沿第一方向的总长度,对超出目标地面长度的第二分区对应的点云进行过滤,并确定目标地面长度内的第二分区对应的点云为第二地面点云。
5、结合第一方面,在第一方面的某些实现方式中,基于第二地面点云,确定挡墙对应的点云检测结果,包括:根据第二地面点云获取地面方程;根据地面方程确定地面以上目标高度处的点云,并根据地面以上目标高度处的点云确定挡墙对应的点云检测结果。
6、结合第一方面,在第一方面的某些实现方式中,根据地面以上目标高度处的点云确定挡墙对应的点云检测结果,包括:对地面以上目标高度处的点云进行欧式聚类,得到多个聚类点云;删除多个聚类点云中点云数量小于目标数量的聚类点云,得到挡墙对应的点云检测结果。
7、结合第一方面,在第一方面的某些实现方式中,获取矿区的目标区域对应的目标点云,包括:将目标区域对应的原始点云注册到多个栅格;基于多个栅格各自对应的点云,确定多个栅格各自的高程值;基于多个栅格各自的高程值,生成目标区域对应的目标点云。
8、结合第一方面,在第一方面的某些实现方式中,基于多个栅格各自对应的点云,确定多个栅格各自的高程值,包括:确定每个栅格对应的点云中高度最低的多个点;将多个点的均值确定为栅格的高程值。
9、结合第一方面,在第一方面的某些实现方式中,基于多个栅格各自的高程值,生成目标区域对应的目标点云,包括:基于多个栅格各自的高程值,生成目标区域对应的中间点云;对中间点云依次执行表面重建、体素滤波和离群点滤波中的至少一项,得到目标区域对应的目标点云。
10、第二方面,提供一种挡墙检测装置,包括:获取模块,配置为获取矿区的目标区域对应的目标点云;第一划分模块,配置为在第一方向上按照第一距离间隔对目标点云进行划分,得到多个第一分区,第一方向为目标区域内挡墙纵向延伸的方向;第一检测模块,配置为基于多个第一分区各自对应的点云进行第一地面检测,得到第一地面点云;第二划分模块,配置为在第二方向上按照第二距离间隔对第一地面点云进行划分,得到多个第二分区,第二方向为目标区域内挡墙横向延伸的方向;第二检测模块,配置为基于多个第二分区各自对应的点云进行第二地面检测,得到第二地面点云;确定模块,配置为基于第二地面点云,确定挡墙对应的点云检测结果。
11、第三方面,提供一种计算机可读存储介质,其上存储有计算机程序,其特征在于,计算机程序被处理器执行时实现上述第一方面提供的挡墙检测方法。
12、第四方面,提供一种自动驾驶车辆,其特征在于,包括:车体;处理器,置于车体中;以及存储器,亦置于车体中,用于存储处理器的可执行指令;其中,处理器配置为经由执行可执行指令来执行上述第一方面提供的挡墙检测方法。
13、结合第四方面,在第四方面的某些实现方式中,自动驾驶车辆还包括多个激光雷达,分别置于车体的前进方向的左侧、右侧、前侧和后侧,用于采集点云数据。优选地,自动驾驶车辆还包括定位装置,定位装置设置于车体的上方,用于获取自动驾驶车辆的位姿数据,以便自动驾驶车辆基于位姿数据停靠至挡墙的挡墙线。
14、本申请实施例提供的挡墙检测方法,通过在第一方向上按照第一距离间隔对目标点云进行划分,得到多个第一分区,基于多个第一分区各自对应的点云进行第一地面检测,得到第一地面点云,然后在第二方向上按照第二距离间隔对第一地面点云进行划分,得到多个第二分区,然后基于多个第二分区各自对应的点云进行第二地面检测,得到第二地面点云,最终基于第二地面点云确定挡墙对应的点云检测结果,实现了识别目标区域中的挡墙的目的。其中,第一方向为目标区域内挡墙纵向延伸的方向,第二方向为目标区域内挡墙横向延伸的方向。
15、本申请通过在第一方向(即挡墙纵向延伸的方向)上按照第一距离间隔进行划分形成多个纵向分区(即第一分区),能够缩小每个第一分区对应的点云的分布变化,以提高第一地面检测的精确性,从而得到更准确的第一地面点云。接着,在第二方向(即挡墙横向延伸的方向)上按照第二距离间隔对第一地面点云进行划分和地面检测,能够进一步地缩小每个第二分区对应的点云的分布变化,得到更加精确的第二地面点云,进而基于更加准确的第二地面点云提高挡墙对应的点云检测结果的精度。再者,对目标点云进行划分也能够降低在排土位附近地形局部坡度变化剧烈和/或存在较多土堆导致的挡墙难以被识别的几率,从而提高鲁棒性。由此可见,本申请实施例能够降低甚至避免复杂地形对识别结果的干扰,从而有效提升挡墙的识别精度和算法鲁棒性。
技术特征:
1.一种挡墙检测方法,其特征在于,包括:
2.根据权利要求1所述的挡墙检测方法,其特征在于,所述基于所述多个第二分区各自对应的点云进行第二地面检测,得到第二地面点云,包括:
3.根据权利要求2所述的挡墙检测方法,其特征在于,所述根据所述差值达到差值阈值的第二分区对应的点云确定所述第二地面点云,包括:
4.根据权利要求1至3任一项所述的挡墙检测方法,其特征在于,所述基于所述第二地面点云,确定所述挡墙对应的点云检测结果,包括:
5.根据权利要求4所述的挡墙检测方法,其特征在于,所述根据所述地面以上目标高度处的点云确定所述挡墙对应的点云检测结果,包括:
6.根据权利要求1至3任一项所述的挡墙检测方法,其特征在于,所述获取矿区的目标区域对应的目标点云,包括:
7.根据权利要求6所述的挡墙检测方法,其特征在于,所述基于所述多个栅格各自对应的点云,确定所述多个栅格各自的高程值,包括:
8.根据权利要求6所述的挡墙检测方法,其特征在于,所述基于所述多个栅格各自的高程值,生成所述目标区域对应的目标点云,包括:
9.一种挡墙检测装置,其特征在于,包括:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至8任一项所述的挡墙检测方法。
技术总结
本申请提供一种挡墙检测方法和挡墙检测装置、存储介质,涉及智慧矿山、自动驾驶以及无人车技术领域。该方法包括:获取矿区的目标区域对应的目标点云;在第一方向上按照第一距离间隔对目标点云进行划分,得到多个第一分区;基于多个第一分区各自对应的点云进行第一地面检测,得到第一地面点云;在第二方向上按照第二距离间隔对第一地面点云进行划分,得到多个第二分区;基于多个第二分区各自对应的点云进行第二地面检测,得到第二地面点云;基于第二地面点云,确定挡墙对应的点云检测结果。本申请能够降低甚至避免复杂地形对识别结果的干扰,从而有效提升挡墙的识别精度和算法鲁棒性。
技术研发人员:程鹏,李机智
受保护的技术使用者:北京易控智驾科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!