扰动抑制系统
本发明涉及空间激光通信及伺服控制,尤其涉及一种扰动抑制系统。
背景技术:
1、随着光电技术的发展,光电跟瞄系统在武器装备、天文观测、靶场测量中得到了广泛应用,并逐步发展至动载体平台上工作。惯性参考单元、快速反射镜、ccd等组成的复合轴视轴稳定系统,在光电跟瞄(atp)系统中起着重要作用。其中,惯性参考单元可以为系统提供相对于惯性空间的稳定参考光束,这个参考光束以最小抖动离开惯性参考单元,成为atp系统稳定的“虚拟”星。
2、在惯性参考单元的控制系统中,电涡流环主要完成初始角位置的校准工作,其在动载体平台上工作时面临的扰动是影响校准精度和参考光束稳定度的重要因素。为了提高系统的扰动抑制能力,许多控制算法被应用于惯性参考单元稳定控制的研究中。其中,pi、pid控制器因其可以根据历史数据和差别的出现率来调整输入值、原理简单等优点而被广泛应用。
3、然而,在实际应用中系统所受扰动是随机的,设定不变的控制器不能保证系统对所有扰动的抑制效果。因此,能够根据扰动在不同时段的特性而改变的控制器设计成为惯性参考单元稳定控制领域的一个重要问题。
技术实现思路
1、鉴于上述技术问题,本发明提供了一种扰动抑制系统,能够根据扰动信号的特性而改变的变增益pi控制器的输出,提高惯性参考单元的扰动抑制能力。
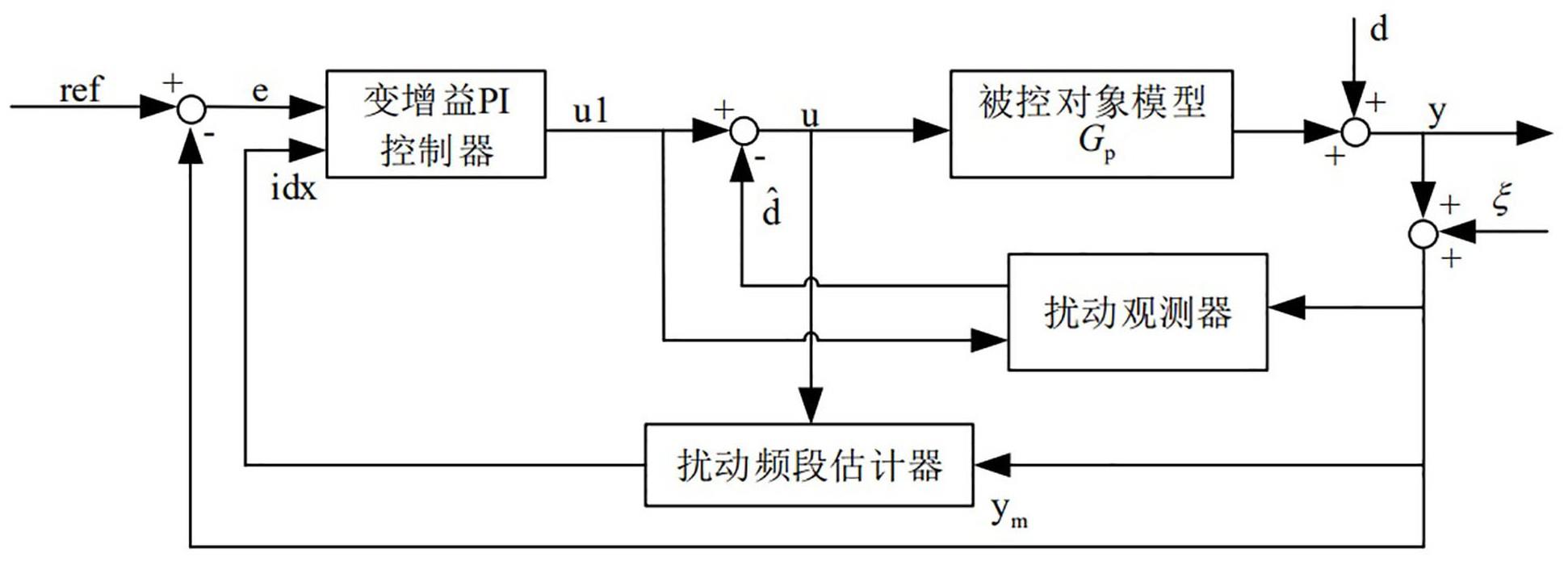
2、作为本发明的一个方面,提供了一种扰动抑制系统,包括惯性参考单元、位移传感器、控制单元和执行器。惯性参考单元包括基座和与所述基座连接的平台,所述平台适用于支撑激光器,所述激光器发出的激光被配置为对准目标,其中,在扰动信号的作用下,所述平台相对于所述基座发生相对运动,所述扰动信号包括来自外部环境的干扰信号。位移传感器适用于测量所述相对运动的第一位移。控制单元包括扰动频段估计器、变增益pi控制器、扰动观测器和处理器。扰动频段估计器适用于生成频段指示信号,变增益pi控制器适用于根据所述频段指示信号,生成与所述频段指示信号匹配的补偿电压。扰动观测器适用于根据所述第一位移和所述补偿电压,对所述扰动信号进行估计,得到估计扰动。处理器适用于根据所述估计扰动和所述补偿电压得到驱动电压。执行器安装在所述基座与所述平台之间,适用于接收并响应于所述驱动电压,使所述平台发生第二位移以抵消所述第一位移,避免位于所述平台上的所述激光器相对于所述基座偏转,使所述激光始终对准所述目标。其中,所述扰动频段估计器根据所述第一位移和反馈的第二位移的偏差生成所述频段指示信号。
3、根据本发明的实施例,所述扰动频段估计器包括多个带通滤波模块、多个滑动求均方根窗口和频段选择模块。多个带通滤波模块被配置为具有不同的中心频率,多个所述带通滤波模块适用于放大所述偏差对应的所述带通滤波模块频段的增益,输出幅值不同的增益扰动信号。多个滑动求均方根窗口分别适用于接收所述增益扰动信号,并求取每个所述增益扰动信号的第一均方根值,以量化所述增益扰动信号,得到多个增益扰动值。频段选择模块适用于比较多个所述增益扰动值,输出所述频段指示信号。
4、根据本发明的实施例,其中一个所述滑动求均方根窗口,适用于对所述偏差求取第二均方根值,频段选择模块将第二均方根值与设定扰动值进行比较,小于设定扰动值的情况下,所述频段指示信号为0;大于设定扰动值的情况下,所述频段指示信号为扰动值最大的一路信号的序号。
5、根据本发明的实施例,所述增益扰动值为:去除在所述惯性参考单元没有扰动信号作用下、所述滑动求均方根窗口的偏置值后的所述第一均方根值。
6、根据本发明的实施例,所述扰动频段估计器还包括二阶低通滤波模块,二阶低通滤波模块设置在所述带通滤波模块的输入端,适用于将所述位移传感器携带的噪声信号滤除。
7、根据本发明的实施例,所述变增益pi控制器包括pi控制模块、多个非对称带通滤波模块以及增益选择模块。pi控制模块适用于对所述第一位移构成的差值进行pi调节,得到调节信号。多个非对称带通滤波模块被配置为具有不同的中心频率,分别适用于将所述调节信号对应的所述非对称带通滤波模块频段的增益放大,以提高所述pi控制模块的增益。增益选择模块适用于根据所述频段指示信号选择非对称带通滤波模块,将所选择的非对称带通滤波模块的调节电压输出,作为所述补偿电压,实现变增益pi控制。
8、根据本发明的实施例,在所述差值小于预设扰动值的情况下,所述增益选择模块将所述调节信号作为所述补偿电压输出。
9、根据本发明的实施例,所述扰动观测器包括扰动观测模块和低通滤波模块。扰动观测模块适用于根据所述第一位移和所述补偿电压得到所述扰动信号的估计值,低通滤波模块适用于对所述扰动信号的估计值进行滤波,得到所述估计扰动。
10、根据本发明的实施例,所述执行器包括音圈电机,所述音圈电机安装于所述基座与所述平台之间,并与所述位移传感器间隔设置。其中,所述平台和所述基座之间通过柔性铰链连接,所述扰动信号自所述基座向所述平台传递,使所述平台与所述基座发生所述第一位移。
11、根据本发明的实施例,所述扰动抑制系统还包括外部输入至所述变增益pi控制器的参考信号,所述参考信号为非0的情况下,能够判断所述扰动抑制系统的正弦跟踪能力;所述参考信号为0的情况下,能够判断所述扰动抑制系统的扰动抑制能力。
12、根据本发明实施例的扰动抑制系统,通过改变扰动观测器的输出点的位置,提升了系统对低频噪声的抑制能力。通过扰动频段估计器根据第一位移和反馈的第二位移的偏差生成频段指示信号,变增益pi控制器生成与频段指示信号匹配的补偿电压,进而处理器驱动执行器,使执行器驱动平台发生第二位移以抵消第一位移,使激光器发出的光束不受基座扰动的影响,提高了扰动抑制系统的跟踪能力,提升了惯性参考单元对扰动的抑制效果,提高了激光的稳定精度,从而提了光电跟瞄系统的指向精度与跟踪能力。
技术特征:
1.一种扰动抑制系统,其特征在于,包括:
2.根据权利要求1所述的扰动抑制系统,其特征在于,所述扰动频段估计器包括:
3.根据权利要求2所述的扰动抑制系统,其特征在于,其中一个所述滑动求均方根窗口,适用于对所述偏差求取第二均方根值,频段选择模块将第二均方根值与设定扰动值进行比较,小于设定扰动值的情况下,所述频段指示信号为0;大于设定扰动值的情况下,所述频段指示信号为扰动值最大的一路信号的序号。
4.根据权利要求3所述的扰动抑制系统,其特征在于,所述增益扰动值为:去除在所述惯性参考单元没有扰动信号作用下、所述滑动求均方根窗口的偏置值后的所述第一均方根值。
5.根据权利要求2所述的扰动抑制系统,其特征在于,所述扰动频段估计器还包括:
6.根据权利要求2所述的扰动抑制系统,其特征在于,所述变增益pi控制器包括:
7.根据权利要求6所述的扰动抑制系统,其特征在于,在所述差值小于预设扰动值的情况下,所述增益选择模块将所述调节信号作为所述补偿电压输出。
8.根据权利要求1所述的扰动抑制系统,其特征在于,所述扰动观测器包括:
9.根据权利要求8所述的扰动抑制系统,其特征在于,所述执行器(13)包括:音圈电机,所述音圈电机安装于所述基座(11)与所述平台(12)之间,并与所述位移传感器(2)间隔设置;
10.根据权利要求9所述的扰动抑制系统,其特征在于,还包括外部输入至所述变增益pi控制器的参考信号,所述参考信号为非0的情况下,能够判断所述扰动抑制系统的正弦跟踪能力;所述参考信号为0的情况下,能够判断所述扰动抑制系统的扰动抑制能力。
技术总结
本发明提供了一种扰动抑制系统,包括:惯性参考单元,包括基座和与基座连接的平台,在扰动信号的作用下,平台相对于基座发生相对运动;位移传感器,适用于测量相对运动的第一位移;控制单元包括:变增益PI控制器,适用于根据频段指示信号,生成与频段指示信号匹配的补偿电压;扰动观测器,适用于根据第一位移和补偿电压,对扰动信号进行估计,得到估计扰动;处理器,适用于根据估计扰动和补偿电压得到驱动电压;执行器,安装在基座与平台之间,适用于接收并响应于驱动电压,使平台发生第二位移以抵消第一位移,避免位于平台上的激光器相对于基座偏转,使激光始终对准目标;扰动频段估计器根据第一位移和反馈的第二位移的偏差生成频段指示信号。
技术研发人员:拓卫晓,刘雅琪,李醒飞,何梦洁,王天宇,王信用
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!