控制参数设计引入积分系数的飞行姿态控制方法与流程
本发明涉及飞行姿态控制,具体涉及一种控制参数设计引入积分系数的飞行姿态控制方法。
背景技术:
1、飞行器姿态控制的闭环系统的性能受限于最内环的性能,最内环的性能又受限于饱和限制(最大舵偏值)。例如,在设计驾驶仪时,舵偏角度存在物理限制,飞行器的角速度因此而受限。现有技术在设计内环时,没有考虑饱和限制对系统带宽的约束,通常采用增加增益的方式来设计内环,但一味增加增益可能反而会降低系统裕度,不能使系统更快地消除外加扰动,无法进一步提升系统性能。所以在饱和限制的条件约束下,如何设计出带宽尽可能大的内环,以提高系统相应速度和稳定性是本发明需要解决的技术问题。
2、另外,现有方案对飞行姿态的控制计算中,通常将系统简化为二阶系统来设计控制参数,在首先计算得到外环的比例系数(该比例系数为外环姿态回路的比例控制参数)后,使得积分系数(该积分系数为外环姿态回路的积分控制参数)与比例系数呈合适比例即可,并未考虑积分系数本身对控制参数动态调整精准性的影响,建模不够精准,进而使得对飞行姿态的控制精度不够理想。
技术实现思路
1、本发明以提高对飞行器的姿态控制精度为目的,提供了一种控制参数设计引入积分系数的飞行姿态控制方法。
2、为达此目的,本发明采用以下技术方案:
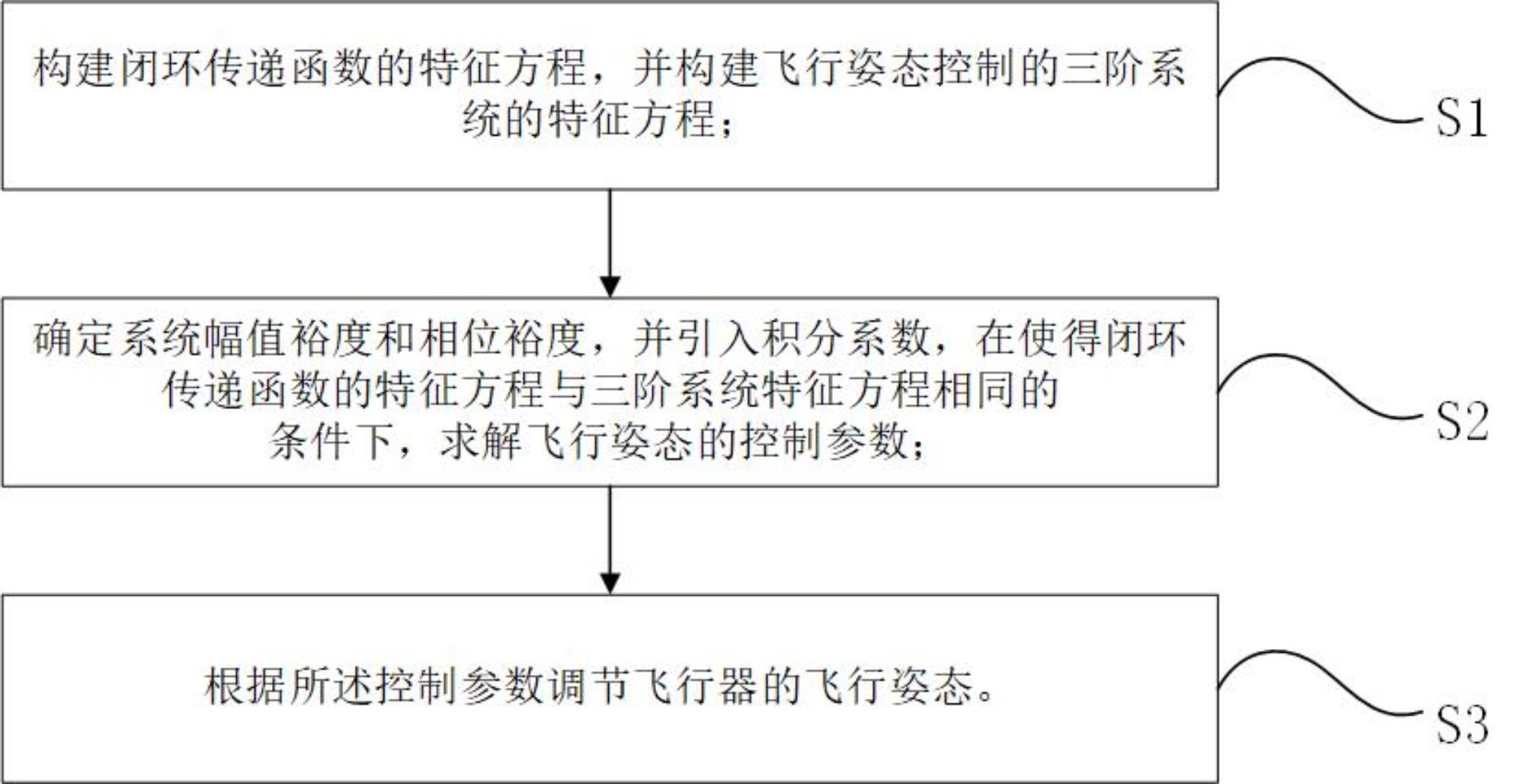
3、提供一种控制参数设计引入积分系数的飞行姿态控制方法,包括步骤:
4、s1,构建闭环传递函数的特征方程,并构建飞行姿态控制的三阶系统的特征方程;
5、s2,确定系统幅值裕度和相位裕度,并引入积分系数,在使得的条件下,求解飞行姿态的控制参数;
6、s3,根据所述控制参数调节飞行器的飞行姿态。
7、作为优选,,其中,为算子;、分别为空气动力阻尼和舵的效率;为微分系数;为比例系数。
8、作为优选,,其中表示飞行器允许的最大舵偏角;表示飞行器允许的最大姿态角偏差。
9、作为优选,,其中,表示极点,表示阻尼比,表示带宽。
10、作为优选,步骤s2中,确定系统的所述幅值裕度和所述相位裕度的方法为:在系统的开环传递函数和闭环传递函数的bode图中,调节和的值,使得取得所需的所述幅值裕度和所述相位裕度。
11、作为优选,。
12、作为优选,,其中,为算子;表示极点,表示阻尼比,表示带宽。
13、作为优选,,为比例系数。
14、作为优选,使得的条件为:,0。
15、作为优选,系统的所述闭环传递函数,系统的开环传递函数。
16、本发明具有以下有益效果:
17、1、采用三阶系统设计飞行姿态的控制参数,并在设计控制参数时引入了积分系数,将积分系数作为影响飞行器姿态调整的重要因素,使得控制模型建模更加精准,提高了对飞行器姿态的控制精度。
18、2、在引入积分系数的基础上,以最大舵偏值作为输出的饱和限制来确定合适带宽,相比较现有方案一味增加增益来设计内环的方式,不会降低系统裕度,能够使得系统能够更快速地消除外加扰动,进而提高系统响应的快速性和稳定性。
技术特征:
1.一种控制参数设计引入积分系数的飞行姿态控制方法,其特征在于,包括步骤:
2.根据权利要求1所述的控制参数设计引入积分系数的飞行姿态控制方法,其特征在于,,其中,为算子;、分别为空气动力阻尼和空气舵效;为微分系数;为比例系数。
3.根据权利要求2所述的控制参数设计引入积分系数的飞行姿态控制方法,其特征在于,,其中表示飞行器允许的最大舵偏角;表示飞行器允许的最大姿态角偏差。
4.根据权利要求2所述的控制参数设计引入积分系数的飞行姿态控制方法,其特征在于,,其中,表示极点,表示阻尼比,表示带宽。
5.根据权利要求4所述的控制参数设计引入积分系数的飞行姿态控制方法,其特征在于,步骤s2中,确定系统的所述幅值裕度和所述相位裕度的方法为:在系统的开环传递函数和闭环传递函数的bode图中,调节和的值,使得取得所需的所述幅值裕度和所述相位裕度。
6.根据权利要求4所述的控制参数设计引入积分系数的飞行姿态控制方法,其特征在于,。
7.根据权利要求1所述的控制参数设计引入积分系数的飞行姿态控制方法,其特征在于,,其中,为算子;表示极点,表示阻尼比,表示带宽。
8.根据权利要求2或7所述的控制参数设计引入积分系数的飞行姿态控制方法,其特征在于,,为比例系数。
9.根据权利要求4-7任意一项所述的控制参数设计引入积分系数的飞行姿态控制方法,其特征在于,使得的条件为:,0。
10.根据权利要求2所述的控制参数设计引入积分系数的飞行姿态控制方法,其特征在于,系统的所述闭环传递函数,系统的开环传递函数。
技术总结
本发明公开了一种控制参数设计引入积分系数的飞行姿态控制方法,采用三阶系统设计飞行姿态的控制参数,并在设计控制参数时引入了积分系数,将积分系数作为影响飞行器姿态调整的重要因素,使得控制模型建模更加精准,提高了对飞行器姿态的控制精度。在引入积分系数的基础上,以最大舵偏值作为输出的饱和限制来确定合适带宽,相比较现有方案一味增加增益来设计内环的方式,不会降低系统裕度,能够使得系统能够更快速地消除外加扰动,进而提高系统响应的快速性和稳定性。
技术研发人员:李洪威,王莹,姜明
受保护的技术使用者:北京中星时代科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!