目标姿态测量方法、系统、电子设备和介质与流程
本发明涉及导航测量技术与卫星导航应用,尤其涉及一种目标姿态测量方法、系统、电子设备和介质。
背景技术:
1、利用导航卫星进行载体姿态测量是卫星导航领域的一个重要技术分支。与惯导系统相比,利用导航卫星进行姿态测量具有无误差积累、成本低的优点,同时也能够保证较高的测量精度。
2、目前,利用导航卫星进行姿态测量主要包括长基线和短基线两种,各自存在明显的优缺点。对于长基线来说,姿态测量精度更高,但是长基线存在整周期模糊,对于安装环境要求较高,需要较大的安装空间,受环境影响较大。对于短基线来说,不存在整周期模糊,但是测量精度偏低。因此,关于导航卫星姿态测量技术还需在整周模糊度快速解算、算法改进、接收天线布局等方面进行进一步研究。
3、为了解决上述问题,亟需提供一种目标姿态测量方法、系统、电子设备和介质,能够利用导航卫星高精度距离测量的优点,将导航星到测量天线的距离测量量转化为测量基线相对于导航星的角度,从而避免了长基线利用载波相位求角度存在相位模糊的问题,有效缩减了测量基线长度,可以应用于较小目标、较短基线的姿态测量。
4、在所述背景技术部分公开的上述信息仅用于加强对本技术的背景的理解,因此它可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本发明主要目的是克服目标载体姿态测量中长基线需解算整周模糊度、短基线测量精度低的问题,提供一种目标姿态测量方法、系统、电子设备和介质,能够利用导航卫星高精度距离测量的优点,将导航星到测量天线的距离测量量转化为测量基线相对于导航星的角度,从而避免了长基线利用载波相位求角度存在相位模糊的问题,有效缩减了测量基线长度,可以应用于较小目标、较短基线的姿态测量。
2、为实现上述的目的,本发明第一方面提供了一种目标姿态测量方法,包括以下步骤:
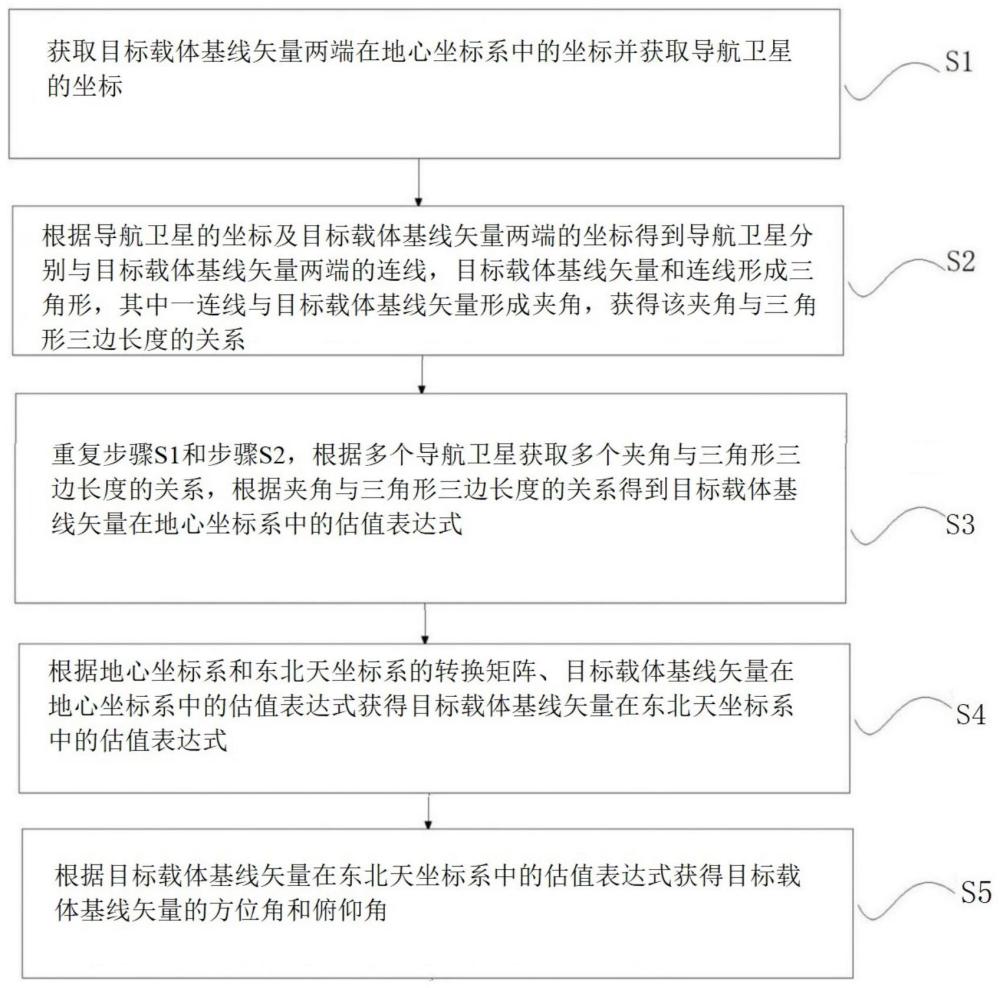
3、s1:通过导航卫星获取目标载体基线矢量两端在地心坐标系中的坐标并获取导航卫星的坐标;
4、s2:根据导航卫星的坐标及目标载体基线矢量两端的坐标得到导航卫星分别与目标载体基线矢量两端的连线,目标载体基线矢量和连线形成三角形,其中一连线与目标载体基线矢量形成夹角,获得该夹角与三角形三边长度的关系;
5、s3:重复步骤s1和步骤s2,根据多个导航卫星获取多个夹角与三角形三边长度的关系,根据夹角与三角形三边长度的关系得到目标载体基线矢量在地心坐标系中的估值表达式;
6、s4:根据地心坐标系和东北天坐标系的转换矩阵、目标载体基线矢量在地心坐标系中的估值表达式获得目标载体基线矢量在东北天坐标系中的估值表达式;
7、s5:根据目标载体基线矢量在东北天坐标系中的估值表达式获得目标载体基线矢量的方位角和俯仰角。
8、根据本发明一示例实施方式,步骤s1中,载体包括导航卫星接收机和设置在载体两端的卫星信号接收天线,目标载体基线矢量由一个卫星信号接收天线指向另一个卫星信号接收天线,导航卫星接收机通过卫星信号接收天线获取目标载体基线矢量两端在地心坐标系中的坐标和导航卫星的坐标。
9、根据本发明一示例实施方式,步骤s2中,所述夹角与三角形三边长度的关系采用公式2:
10、
11、其中,ri1表示导航卫星和目标载体基线矢量一端的距离,ri2表示导航卫星和目标载体基线矢量另一端的距离,d表示目标载体基线矢量的长度,β表示导航卫星与目标载体基线矢量一端的连线和目标载体基线矢量的夹角,β为锐角。
12、根据本发明一示例实施方式,导航卫星和目标载体基线矢量两端的距离通过导航卫星的坐标及目标载体基线矢量两端的坐标得到;
13、
14、
15、其中,ri1表示导航卫星和目标载体基线矢量一端的距离,ri2表示导航卫星和目标载体基线矢量另一端的距离,目标载体基线矢量一端的坐标为(x1,y1,z1),目标载体基线矢量的另一端的坐标为(x2,y2,z2),导航卫星的坐标为(xi,yi,zi)。
16、根据本发明一示例实施方式,步骤s3中,所述根据夹角与三角形三边长度的关系得到目标载体基线矢量在地心坐标系中的估值表达式的方法包括:
17、获取误差项,根据夹角、目标载体基线矢量、目标载体基线矢量的一端指向导航卫星的距离矢量和误差项的关系、夹角和三角形三边长度的关系得到距离矢量和误差项的关系式;
18、将距离矢量和误差项的关系式转换成矩阵形式;
19、利用马尔可夫估计法得到目标载体基线矢量在地心坐标系中的估值表达式。
20、根据本发明一示例实施方式,所述距离矢量和误差项的关系式为公式3:
21、
22、其中,ri1表示导航卫星和目标载体基线矢量一端的距离,ri2表示导航卫星和目标载体基线矢量另一端的距离,d表示目标载体基线矢量的长度,表示目标载体基线矢量,表示导航卫星和目标载体基线矢量一端的矢量形式,εi表示误差项。
23、根据本发明一示例实施方式,距离矢量和误差项的关系式转换成的矩阵形式为公式4:
24、
25、其中,表示目标载体基线矢量的矩阵形式,△xi1表示x1-xi,△yi1表示y1-yi,△zi1表示z1-zi,d表示目标载体基线矢量的长度,△ri表示ri1-ri2,εi表示误差项。
26、根据本发明一示例实施方式,所述目标载体基线矢量在地心坐标系中的估计表达式为公式5:
27、
28、其中,表示目标载体基线矢量的矩阵形式,i表示第i颗导航卫星,l表示观测到目标载体基线矢量的导航卫星的数量,△xi1表示x1-xi,△yi1表示y1-yi,△zi1表示z1-zi,d表示目标载体基线矢量的长度,△ri表示ri1-ri2,εi表示误差项,为误差项εi的方差。
29、根据本发明一示例实施方式,步骤s4中,所述地心坐标系和东北天坐标系转换矩阵采用公式6:
30、
31、其中,m表示地心坐标系和东北天坐标系的转换矩阵,γ表示目标载体基线矢量所在的地理经度,φ表示目标载体基线矢量所在的地理纬度。
32、根据本发明一示例实施方式,步骤s4中,所述根据地心坐标系和东北天坐标系的转换矩阵、目标载体基线矢量在地心坐标系中的估值表达式获得目标载体基线矢量在东北天坐标系中的估值表达式采用公式7:
33、
34、其中,表示目标载体基线矢量在地心坐标系中的矩阵形式,m表示地心坐标系和东北天坐标系的转换矩阵,表示目标载体基线矢量在东北天坐标系中的估值表达式。
35、根据本发明一示例实施方式,步骤s5中,所述根据目标载体基线矢量在东北天坐标系中的估值表达式获得目标载体基线矢量的方位角和俯仰角采用公式8:
36、
37、其中,a表示方位角,e表示俯仰角,表示目标载体基线矢量在东北天坐标系中的估值表达式,atan表示反三角函数。
38、作为本发明的第二个方面,提供一种目标姿态测量系统,包括:
39、坐标获取模块,用于通过导航卫星获取目标载体基线矢量两端在地心坐标系中的坐标并获取导航卫星的坐标;
40、夹角与三边长度关系计算模块,用于根据导航卫星的坐标及目标载体基线矢量两端的坐标得到导航卫星分别与目标载体基线矢量两端的连线,目标载体基线矢量和连线形成三角形,其中一连线与目标载体基线矢量形成夹角,获得该夹角与三角形三边长度的关系;
41、地心坐标系估值表达式计算模块,用于获取多个导航卫星的夹角与三角形三边长度的关系,根据夹角与三角形三边长度的关系得到目标载体基线矢量在地心坐标系中的估值表达式;
42、东北天坐标系估值表达式计算模块,用于根据地心坐标系和东北天坐标系的转换矩阵、目标载体基线矢量在地心坐标系中的估值表达式获得目标载体基线矢量在东北天坐标系中的估值表达式;和
43、姿态计算模块,用于根据目标载体基线矢量在东北天坐标系中的估值表达式获得目标载体基线矢量的方位角和俯仰角。
44、作为本发明的第三个方面,本发明提供一种电子设备,包括:
45、一个或多个处理器;
46、存储装置,用于存储一个或多个程序;
47、当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现所述基于导航卫星测距的目标姿态测量方法。
48、作为本发明的第四个方面,本发明提供一种计算机可读介质,其上存储有计算机程序,所述程序被处理器执行时实现所述基于导航卫星测距的目标姿态测量方法。
49、本发明的优势效果是,本发明利用导航卫星高精度距离测量的优点,将导航星到测量天线的距离测量量转化为测量基线相对于导航星的角度,从而避免了长基线利用载波相位求角度存在相位模糊的问题,有效缩减了测量基线长度,可以应用于较小目标、较短基线的姿态测量。
- 还没有人留言评论。精彩留言会获得点赞!