物位测量方法、装置、存储介质及电子设备与流程
本公开涉及测量,具体地,涉及物位测量方法、装置、存储介质及电子设备。
背景技术:
1、物位测量,主要是用于测量容器内或存储设备中物料或液体的物位。广泛应用于煤场、煤斗、灰库、水泥、石膏库、渣仓、粮仓等需要精确控制工艺过程的容器内。
2、相关技术中,当测量容器内的待检测物料的物位时,通常通过获取容器底部的图像,之后采用边缘识别算法对获取的图像进行处理,得到待检测物料在容器内的物位。但是采用这种方法对待检测物料的物位进行测量时,当出现容器内待检测物料的颜色与容器侧壁的颜色色差比较小、容器内光线比较弱、待检测物料颗粒度交底和容器内灰尘较大中的至少一种情况时,增加了对待检测物料的边缘识别难度,且降低测量待检测物料物位的准确性。
技术实现思路
1、本公开的目的是提供物位测量方法、装置、存储介质及电子设备,以解决上述相关技术问题。
2、为了实现上述目的,本公开提供一种物位测量方法,所述方法包括:
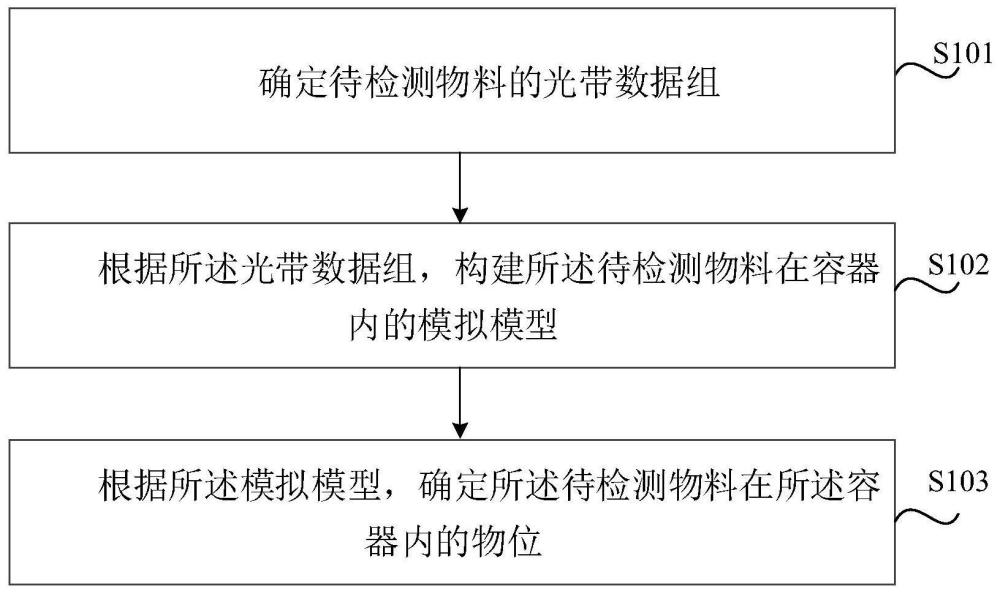
3、确定待检测物料的光带数据组,所述光带数据组为激光光带上的多个三维坐标数据,所述激光光带是激光光源照射到所述待检测物料的表面后与所述待检测物料的表面形成的,所述激光光源为面激光光源;
4、根据所述光带数据组,构建所述待检测物料在容器内的模拟模型;
5、根据所述模拟模型,确定所述待检测物料在所述容器内的物位。
6、可选地,所述确定待检测物料的光带数据组,包括:
7、确定所述激光光源的入射角度;
8、将所述激光光源照射到未装有待检测物料的所述容器内,确定所述容器底部的第一图像;
9、将所述激光光源照射到装有待检测物料的所述容器内,确定所述容器底部的第二图像;
10、根据所述入射角度、所述第一图像以及所述第二图像,确定所述光带数据组。
11、可选地,所述根据所述入射角度、所述第一图像以及所述第二图像,确定所述光带数据组,包括:
12、根据所述第一图像,确定第一激光光带,所述第一激光光带为所述激光光源照射到所述容器底部并在所述容器底部形成的光带;
13、根据所述第二图像,确定第二激光光带,所述第二激光光带为所述激光光源照射到所述待检测物料并在所述待检测物料表面形成的光带;
14、根据所述第一激光光带、所述第二激光光带以及所述入射角度,确定所述光带数据组。
15、可选地,所述根据所述第一激光光带、所述第二激光光带以及所述入射角度,确定所述光带数据组,包括:
16、根据预设数量个第一采样点对所述第一激光光带进行随机采样,并确定每个所述第一采样点在所述第二激光光带上对应的第二采样点;
17、计算每个所述第一采样点与所述第二采样点之间的像素距离,并根据所述像素距离与所述入射角度,确定多个三维坐标数据;
18、将多个三维坐标数据组合为所述光带数据组。
19、可选地,所述容器顶部的侧壁设置有多个用于发射所述激光光源的激光器,且相邻两个所述激光器之间的间隔角度大于预设角度。
20、可选地,所述容器顶部设有图像采集器,所述容器顶部侧壁设有用于发射所述激光光源的激光器;
21、当所述容器顶部侧壁设有一个激光器时,所述图像采集器设置在所述激光器的对侧或所述容器顶部的中心区域;
22、当所述容器顶部侧壁设有多个激光器时,所述图像采集器设置在所述容器顶部的中心区域,且相邻两个所述激光器之间的间隔角度大于预设角度。
23、可选地,所述激光光源的颜色与所述待检测物料的颜色之间的对比度大于预设对比度。
24、第二方面,本公开提供一种物位测量装置,包括数据确定模块、模型构建模块以及确定模块;
25、所述数据确定模块,用于确定待检测物料的光带数据组,所述光带数据组为激光光带上的多个三维坐标数据,所述激光光带是激光光源照射到所述待检测物料的表面后与所述待检测物料的表面形成的,所述激光光源为面激光光源;
26、所述模型构建模块,用于根据所述光带数据组,构建所述待检测物料在容器内的模拟模型;
27、所述确定模块,用于根据所述模拟模型,确定所述待检测物料在所述容器内的物位。
28、可选地,所述数据确定模块包括:
29、第一确定模块,用于确定所述激光光源的入射角度;
30、第二确定模块,用于将所述激光光源照射到未装有待检测物料的所述容器内,确定所述容器底部的第一图像;
31、第三确定模块,用于将所述激光光源照射到装有待检测物料的所述容器内,确定所述容器底部的第二图像;
32、第四确定模块,用于根据所述入射角度、所述第一图像以及所述第二图像,确定所述光带数据组。
33、可选地,所述第四确定模块包括:
34、第一确定子模块,用于根据所述第一图像,确定第一激光光带,所述第一激光光带为所述激光光源照射到所述容器底部并在所述容器底部形成的光带;
35、第二确定子模块,用于根据所述第二图像,确定第二激光光带,所述第二激光光带为所述激光光源照射到所述待检测物料并在所述待检测物料表面形成的光带;
36、第三确定子模块,用于根据所述第一激光光带、所述第二激光光带以及所述入射角度,确定所述光带数据组。
37、可选地,所述第三确定子模块包括:
38、第四确定子模块,用于根据预设数量个第一采样点对所述第一激光光带进行随机采样,并确定每个所述第一采样点在所述第二激光光带上对应的第二采样点;
39、计算模块,用于计算每个所述第一采样点与所述第二采样点之间的像素距离,并根据所述像素距离与所述入射角度,确定多个三维坐标数据;
40、组合模块,用于将多个三维坐标数据组合为所述光带数据组。
41、可选地,所述装置中,在所述容器顶部的侧壁设置有多个用于发射所述激光光源的激光器,且相邻两个所述激光器之间的间隔角度大于预设角度。
42、可选地,所述装置中,在所述容器顶部设有图像采集器,所述容器顶部侧壁设有用于发射所述激光光源的激光器;
43、当所述容器顶部侧壁设有一个激光器时,所述图像采集器设置在所述激光器的对侧或所述容器顶部的中心区域;
44、当所述容器顶部侧壁设有多个激光器时,所述图像采集器设置在所述容器顶部的中心区域,且相邻两个所述激光器之间的间隔角度大于预设角度。
45、可选地,所述激光光源的颜色与所述待检测物料的颜色之间的对比度大于预设对比度。
46、第三方面,本公开提供一种非临时性计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现本公开第一方面提供的任一项所述方法的步骤。
47、第四方面,本公开提供一种电子设备,包括:
48、存储器,其上存储有计算机程序;
49、处理器,用于执行所述存储器中的所述计算机程序,以实现本公开第一方面提供的任一项所述方法的步骤。
50、通过上述技术方案,首先,确定待检测物料的光带数据组,光带数据组为激光光带上的多个三维坐标数据,激光光带是激光光源照射到待检测物料的表面后与待检测物料的表面形成的,激光光源为面激光光源。之后根据所述光带数据组,构建待检测物料在容器内的模拟模型;并根据模拟模型,确定待检测物料在容器内的物位。可以降低识别待检测物料的难度,进而可以提高对待检测物料表面识别的准确性,以及可以提高测量待检测物料物位的准确性。
51、本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!