一种天基无源协同多目标观测数据关联定位方法
本发明涉及空间非合作目标态势感知,具体为一种天基无源协同多目标观测数据关联定位方法。
背景技术:
1、随着几十年来人类航天技术的蓬勃发展,轨道空间日益拥挤,近地轨道上运行着大量的空间碎片与卫星,轨道安全问题日益突出。为了避免现役卫星与空间碎片等空间非合作目标发生碰撞,发展包含识别、定轨、编目、监测、跟踪与预警等在内的空间态势感知技术成为了必然选项。
2、我国只在有限区域部署了地基观测平台,对于日益增多的近地轨道空间在轨编目目标,地面站的探测跟踪能力已捉襟见肘。天基无源光学探测由于其隐蔽性、传感器体积小等优势,在航天器初始轨道确定中被广泛使用。在天基无源协同多目标跟踪定轨中,每颗观测星均观测多颗目标星,如何将不同观测星检测到的同一目标测角数据关联起来,是实现协同跟踪定轨的前提。
3、目前国内外解决该问题主要有如下着手点:构建观测星两测角数据之间的某种特征相关性参数,以参数值描述两测角数据关联的可能性,并选取全局参数值最小的一组解作为正确的关联解。但受限于特殊的星间构型(比如geo轨道多星近乎共面时)、测角误差、轨道倾角等因素,仅选择全局参数值最小的关联序列,无法得到正确的关联。
技术实现思路
1、针对现有技术中存在的问题,本发明提供一种天基无源协同多目标观测,测角数据关联与轨道位置确定方法,能够在复杂环境下依旧保持相对良好的测角数据关联性能与定位能力。
2、一种天基无源协同多目标观测数据关联与定位方法,包括以下步骤:
3、步骤1,定义航天器数据发生器,并通过该数据发生器得到数据关联与定位方法的应用数据。步骤2,构建两视线矢量之间的最小距离模型和全局代价矩阵,应用murty算法得到代价值最小的k-best关联序列。步骤3,应用两种全局关联假设序列权重后处理方法,使关联假设权重个数保持在合理范围内。步骤4,根据权重满足要求的全局关联假设,建立以完成关联的数据作为输入,考虑了观测星测角精度因素的目标轨道位置加权计算模型。步骤5,将上述算法部署在感知卫星上,将相对测量角输入模型中,实现不同观测星对多个目标测角数据的正确关联与目标定位。
4、作为优选,步骤1具体为:步骤1.1,将光学相机安装在感知卫星的质心处,建立光学相机相对视线测量模型,并由此得到相对测量角;步骤1.2,建立考虑地球非球形j2项摄动与月球引力摄动的卫星绝对运动动力学模型。
5、作为优选,步骤1.2中的卫星绝对动力学模型为:其中,r为航天器的位置矢量,为卫星惯性加速度,r为航天器的地心距,表示j2项摄动引起的加速度,am表示多体引力摄动引起的加速度,μe为地球引力常数。
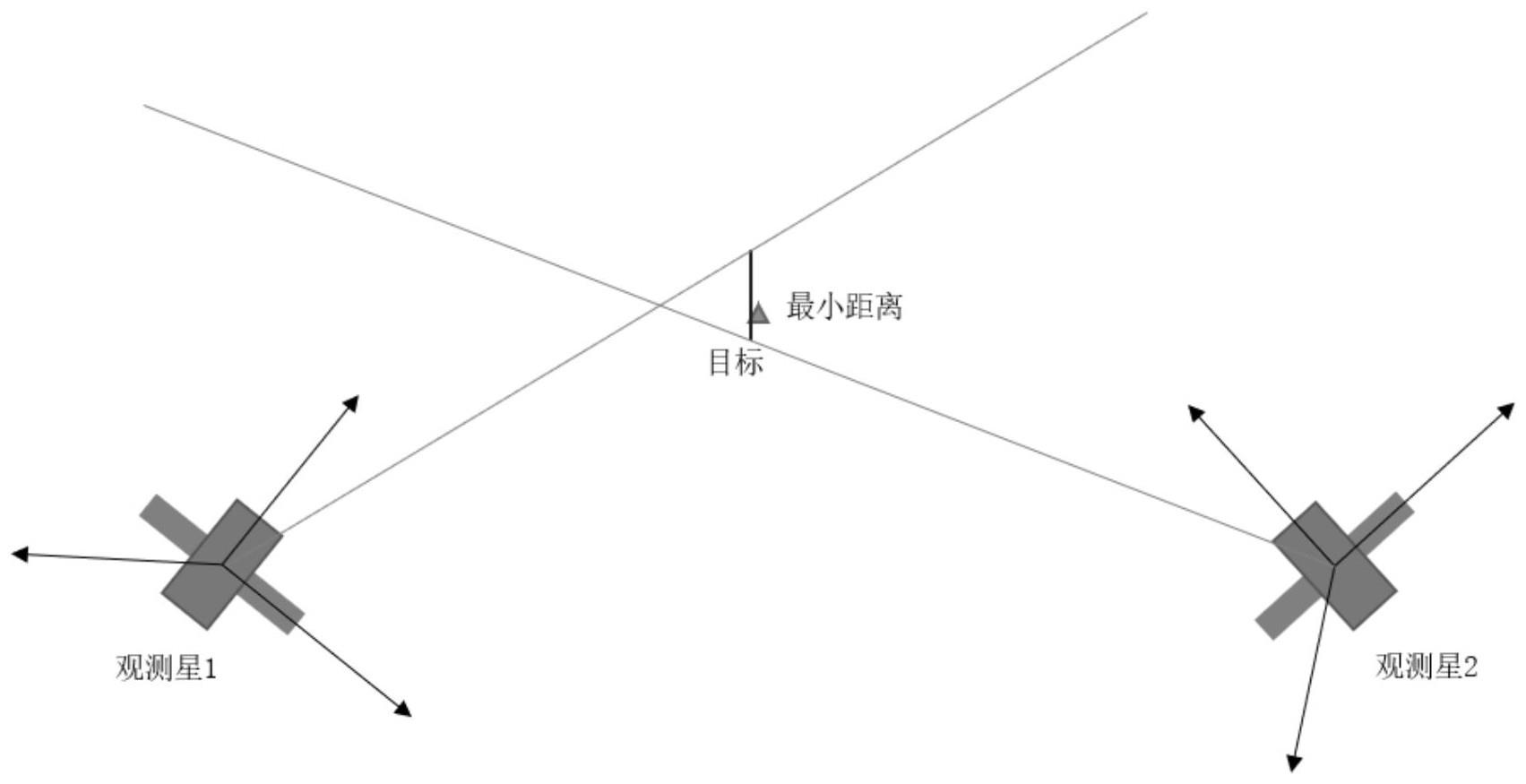
6、作为优选,步骤2具体为:步骤2.1,构建不同传感器视线矢量之间的最小距离模型,求解最小距离线段两个端点;步骤2.2,以视线矢量的最小距离作为元素构建代价矩阵;步骤2.3,应用murty关联分配算法计算代价值最小的k-best全局关联假设;步骤2.4,计算各个全局关联假设代价值所对应的权重并将权重归一化处理。
7、作为优选,步骤2.4中全局代价值与权重的转换公式为:其中zi是第i个全局代价值,zmax是最大的全局代价值,是第i个未归一化的权重值。
8、作为优选,权重值归一化公式为其中是未归一化的权重值,wi是归一化后的代价值。
9、作为优选,步骤3具体为:步骤3.1,设定全局关联假设修剪门限,对于权重值小于门限的全局关联假设,将其剔除;步骤3.2,应用全局关联假设限制算法,只输出有限数量的全局关联假设。
10、作为优选,步骤4中建立的以完成关联的数据作为输入,考虑了观测星测角精度因素的目标轨道位置加权计算模型为:其中,σ1,σ2分别为观测星1和观测星2的测角误差,和分别为最小距离线段的两端点坐标,x为目标的估计位置。
11、有益效果:
12、(1)本发明解决了双星协同多目标观测时,多组测角数据正确关联与多目标定位问题,通过构建模型与应用算法,从而实现正确关联不同观测星来源于同一目标的测角数据并正确计算目标位置;
13、(2)本发明通过算法的改进即可达到较高准度的测角数据关联与多目标定位,无需额外引进设备;
14、(3)本发明通过应用murty算法处理代价矩阵,获得代价值最小的前m个全局关联假设,在复杂环境下依旧能够保持良好的算法性能;
15、(4)本发明将全局关联假设进行后处理,确保输出的权重数量在合理范围内且保证程序运行速度加快;
16、(5)本发明在确定目标位置时,考虑观测星测角精度对目标定位的影响,使目标位置估计更加准确。
技术特征:
1.一种天基无源协同多目标观测数据关联定位方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的天基无源协同多目标观测数据关联定位方法,其特征在于,步骤1具体为:
3.根据权利要求1所述的天基无源协同多目标观测数据关联定位方法,其特征在于,步骤2具体为:
4.根据权利要求3所述的天基无源协同多目标观测数据关联定位方法,其特征在于,步骤2.1具体为:第i颗观测星在t时刻观测第j颗目标星获得的测角数据为,所对应的视线矢量表示为:
5.根据权利要求3所述的天基无源协同多目标观测数据关联定位方法,其特征在于,步骤2.2中,假设某一观测星产生的第i个视线线段与观测星产生的第j个视线线段之间的最小距离,构建代价矩阵如下:
6.根据权利要求5所述的天基无源协同多目标观测数据关联定位方法,其特征在于,步骤2.3中,运用murty分配算法得到对于代价矩阵c的全局代价值最小的前k个全局关联假设,以及k个全局关联假设所对应的全局代价值,即对代价矩阵按照矩阵x元素xij的约束条件进行分配,依次获得代价值最小的关联序列、代价值第二小的关联序列,…,直到共获得k个关联序列。
7.根据权利要求1所述的天基无源协同多目标观测数据关联定位方法,其特征在于,步骤3具体为:
8.根据权利要求7所述的天基无源协同多目标观测数据关联定位方法,其特征在于,步骤3.3具体为:输入和输出个数上限n,将输入降序排列,取其前n个作为输出的权重序列;对于剩余的全局关联权重值,进行归一化处理,使得所有全局关联权重的和为1。
9.根据权利要求1所述的天基无源协同多目标观测数据关联定位方法,其特征在于,步骤4中,建立目标轨道位置加权计算模型,该模型以步骤3完成关联的数据作为输入,考虑了观测星测角精度因素,输出每组关联假设中的目标位置,表示为:,其中,分别为观测星1和观测星2的测角误差,和分别为最小距离线段的两端点坐标,为目标的估计位置。
10.根据权利要求1所述的天基无源协同多目标观测数据关联定位方法,其特征在于,步骤4中,根据观测星的测角精度来分配权重,使得估计位置更偏向于高测角精度传感器所产生的最小距离线段的端点。
技术总结
本发明公开了一种天基无源协同多目标观测数据关联定位方法,包括如下的步骤:步骤1,定义航天器数据发生器,得到数据关联与定位方法的应用数据;步骤2,构建两视线矢量之间的最小距离模型和全局代价矩阵,应用Murty算法得到代价值最小的k‑best关联序列;步骤3,应用两种全局关联假设序列权重后处理方法,使关联假设权重个数保持在合理范围内;步骤4,考虑观测星测角精度因素,建立目标轨道位置加权计算模型;步骤5,将上述算法部署在感知卫星上,将相对测量角输入模型中,实现不同观测星对多个目标测角数据的正确关联与目标定位。本发明提供了一种测角数据关联与轨道位置确定方法,在复杂环境下依旧能保持良好的测角数据关联性能与定位能力。
技术研发人员:龚柏春,张洪源,杨世航,廖文和
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!