高斯背景距离走动扩展目标CFAR检测方法及系统
本发明涉及雷达自适应检测,具体为高斯背景距离走动扩展目标cfar检测方法及系统。
背景技术:
1、雷达通过发射电磁波并接收目标回波信号来实现目标的探测,由于目标与雷达之间的相对运动,雷达回波有不同的形式。为了提高雷达的探测能力,现代雷达系统常常使用多个脉冲的回波进行联合处理,一次联合处理需要的时间称为相参处理间隔。相较于单个脉冲单独处理,多个脉冲联合处理可以极大的提高目标回波的信噪比,从而提高发现目标的概率,提高雷达的探测能力。为了获取关于目标更多的信息,现代雷达通过增加发射信号的带宽来提高雷达的距离分辨率,目标在雷达回波中被分辨为几个离散的散射点,沿距离维上的分布反应了目标的散射点强度信息,单个脉冲的回波称为目标距离像。
2、早期雷达距离分辨率较低,目标可以认为只占据一个分辨单元,同时在相参处理间隔内可以认为在一个距离分辨单元内,目标在不同脉冲的回波可以认为只存在相位的差异,不存在回波包络的变化,即目标在不同脉冲间没有距离走动(rm)。自适应匹配滤波器(amf)检测器被提出,amf以自适应动目标检测(amtd)作为分子,同时分母中的归一化因子使得amf具有对高斯分布杂波参数的恒定虚警(cfar)特性。
3、然而,随着雷达距离分辨率的提高,目标的尺寸常常大于雷达的距离分辨率,从而在回波中占据多个距离单元,目标的能量分散在多个距离单元中,该现象称为距离扩展现象(rd)。此外,由于目标与雷达的相对运动,目标回波可能会出现距离走动现象,给多个脉冲的回波联合处理带来了困难。
4、针对目标距离扩展问题,最早n/m检测器被hughes提出,这是一种针对单个脉冲回波的非相参检测器,其提取距离像中较大的几个散射点作为目标散射点的估计值,针对这几个散射点进行检测。之后gerlach等人提出sdd-glrt检测器被提出,sdd-glrt检测器同样是针对单个脉冲回波的检测器,但是利用了目标散射点密度的先验信息。conte等人将amf扩展到了距离扩展目标的情况,从而提高了amf检测器的使用范围,该方法我们称之为rd-gamf检测器,rd-gamf检测器是一种cfar检测器。然而,上面提到的方法没有考虑目标的距离走动,因此这些方法在目标存在距离走动的情况下的性能将会出现严重的下降。
5、针对目标距离走动问题,hough变换(ht)最早被提出,ht是一种非相参积累的方法,其仅利用了目标回波的幅度信息,没有利用目标回波的相位信息。之后keystone变换(kt)被提出,kt是一种相参积累的方法,可以同时利用目标回波的幅度信息和相位信息,相较于ht方法能够有效提高雷达的检测性能,然而kt需要复杂的插值运算,同时存在多普勒模糊的问题。针对kt的问题,基于radon变换和傅里叶变换的radon-fourier变换(rft)被提出,这种方法可以看做一种广义的滤波器组,是动目标检测(mtd)在目标存在距离走动情况下的推广。然而,rft和mtd均假设背景是高斯白噪声,这限制了rft在实际场景下的使用。针对这个问题,自适应的rft(arft)被提出,arft可以看做自适应动目标检测(amtd)在距离走动情况下的推广,与amtd相同,该方法虽然可以进行有效的杂波抑制,但是输出依赖于杂波的参数,即该方法不是cfar的。最近我们提出了一种在高斯背景下针对距离走动点目标的cfar检测器,其可以看做amf在目标距离走动情况下的扩展,该方法我们称之为rm-gamf检测器,然而该方法仅仅针对点目标进行设计,无法有效积累距离扩展目标在距离维上的能量。
6、针对距离扩展和距离走动同时存在的问题,水鹏朗基于两个相邻回波的相关性提出了一种检测方法,然而该方法仅仅针对高斯白噪声,不具有对高斯分布的cfar特性。此外,一些针对非高斯分布背景的检测方法也被提出,如许述文针对复合高斯分布下的距离走动扩展目标检测问题提出了一种基于长脉冲串分段的检测方法,单个的子脉冲串内可以认为目标不存在距离走动而只存在距离扩展,从而将问题简化。
7、综上可知,现有技术中高斯背景距离走动点目标cfar检测方法只适用于点目标的检测,对于大型目标,现有方法会因为目标能量在距离上的分散,进而导致无法有效检测目标。
技术实现思路
1、本发明的目的是:针对现有技术中对于大型目标,现有方法会因为目标能量在距离上的分散,进而导致无法有效检测目标的问题,提出高斯背景距离走动扩展目标cfar检测方法及系统。
2、本发明为了解决上述技术问题采取的技术方案是:
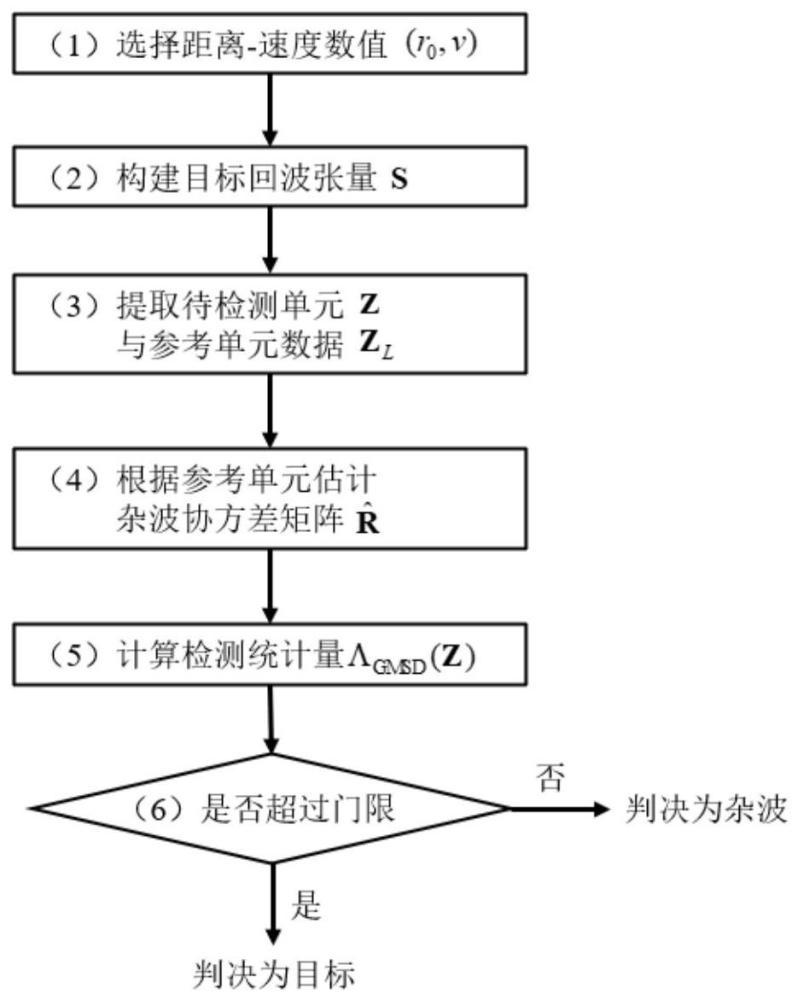
3、高斯背景距离走动扩展目标cfar检测方法,包括以下步骤:
4、步骤一:获取a/d采样后的雷达回波数据,所述雷达回波数据包括待检测单元数据和参考单元数据;
5、步骤二:给定感兴趣的目标匀速运动参数范围,并在目标匀速运动参数范围等间隔取值,每个值即为一个参数点;
6、步骤三:在目标匀速运动参数范围内选取第i个参数点,该参数点对应的值,即(ri,vi),ri表示目标相对雷达的初始距离,vi表示目标相对雷达的速度,并根据(ri,vi)构建目标回波矩阵,之后根据目标回波矩阵得到目标回波张量tr×m×k,其中,r表示散射点的个数,m表示脉冲数,k表示检测窗长度,目标回波张量tr×m×k满足:
7、t(j,:,:)=tj
8、其中,tj表示第j个散射点对应的检测窗内的回波矩阵,t即tensor,表示张量,j=1,...,r;
9、步骤四:根据待检测单元数据和参考单元数据分别得到待检测单元矩阵z和参考单元矩阵zl,并且满足zl=[z1,…,zl],其中z1表示第1个参考单元,zl表示第l个参考单元,待检测单元矩阵z和参考单元矩阵zl中,横向表示不同的距离单元,纵向表示不同的脉冲;
10、步骤五:利用参考单元矩阵zl估计杂波协方差矩阵并根据估计的杂波协方差矩阵结合目标回波张量tr×m×k以及待检测单元矩阵z,得到检测统计量,所述杂波协方差矩阵表示为:
11、
12、其中,l表示参考单元的个数,zi表示第i个参考单元,(·)h表示矩阵的共轭转置;
13、步骤六:将检测统计量与门限阈值进行比较,若检测统计量超过门限,则该参数点为目标;否则为杂波;
14、步骤七:将步骤三中选取的参数点在目标匀速运动参数范围内去除,并重复步骤三到步骤六,完成目标匀速运动参数范围内各个参数点的判断。
15、进一步的,所述检测统计量表示为:
16、λgmsd(z)=bha-1b
17、其中,a和b表示中间变量,tr(·)表示矩阵的迹,(·)h表示矩阵的共轭转置,(·)-1表示矩阵的逆,
18、
19、
20、进一步的,所述检测统计量表示为:
21、
22、其中,tr(·)表示矩阵的迹,(·)h表示矩阵的共轭转置,(·)-1表示矩阵的逆,|·|表示复数的模值。
23、进一步的,所述第j个散射点对应的检测窗内的回波矩阵tj表示为:
24、
25、其中,m表示第m个脉冲,n表示第n个采样点,α表示目标幅度,rj表示第j个散射点的初始距离,vj表示第j个散射点的速度,ρr表示雷达距离分辨率,fd表示目标的多普勒频率,tr表示脉冲重复周期,并且满足如下关系:
26、rj=ri+(j-1)ρr
27、vj=vi
28、其中,ri表示第i个参数点对应的初始距离,vi表示第i个参数点对应的速度;
29、所述雷达距离分辨率ρr表示为:
30、
31、其中,b表示带宽,c表示光速;
32、所述目标的多普勒频率fd表示为:
33、
34、其中,λ表示雷达发射的电磁波的波长,v表示目标相对于雷达的速度。
35、进一步的,所述门限阈值通过蒙特卡洛实验得到,所述蒙特卡洛实验中的杂波协方差矩阵c中的元素满足:
36、c(i,j)=σ2ρ|i-j|
37、其中,σ2表示杂波的平均功率,ρ表示一阶相关系数,i和j表示协方差矩阵c中的元素。
38、高斯背景距离走动扩展目标cfar检测系统,所述系统包括:雷达回波数据获取模块、参数点选取模块、检测统计量生成模块以及门限阈值比较模块;
39、所述雷达回波数据获取模块用于获取a/d采样后的雷达回波数据,所述雷达回波数据包括待检测单元数据和参考单元数据;
40、所述参数点选取模块用于给定感兴趣的目标匀速运动参数范围,并在目标匀速运动参数范围等间隔取值,每个值即为一个参数点,在目标匀速运动参数范围内选取第i个参数点,该参数点对应的值,即(ri,vi),ri表示目标相对雷达的初始距离,vi表示目标相对雷达的速度,并根据(ri,vi)构建目标回波矩阵,之后根据目标回波矩阵得到目标回波张量tr×m×k,其中,r表示散射点的个数,m表示脉冲数,k表示检测窗长度,目标回波张量tr×m×k满足:
41、t(j,:,:)=tj
42、其中,tj表示第j个散射点对应的检测窗内的回波矩阵,t即tensor,表示张量,j=1,...,r;
43、所述检测统计量生成模块用于根据待检测单元数据和参考单元数据分别得到待检测单元矩阵z和参考单元矩阵zl,并且满足zl=[z1,…,zl],其中z1表示第1个参考单元,zl表示第l个参考单元,待检测单元矩阵z和参考单元矩阵zl中,横向表示不同的距离单元,纵向表示不同的脉冲,利用参考单元矩阵zl估计杂波协方差矩阵并根据估计的杂波协方差矩阵结合目标回波张量tr×m×k以及待检测单元矩阵z,得到检测统计量,所述杂波协方差矩阵表示为:
44、
45、其中,l表示参考单元的个数,zi表示第i个参考单元,(·)h表示矩阵的共轭转置;
46、所述门限阈值比较模块用于将检测统计量与门限阈值进行比较,若检测统计量超过门限,则该参数点为目标;否则为杂波,将步骤三中选取的参数点在目标匀速运动参数范围内去除,并重复步骤三到步骤六,完成目标匀速运动参数范围内各个参数点的判断。
47、进一步的,所述检测统计量表示为:
48、λgmsd(z)=bha-1b
49、其中,a和b表示中间变量,tr(·)表示矩阵的迹,(·)h表示矩阵的共轭转置,(·)-1表示矩阵的逆,
50、
51、
52、进一步的,所述检测统计量表示为:
53、
54、其中,tr(·)表示矩阵的迹,(·)h表示矩阵的共轭转置,(·)-1表示矩阵的逆,|·|表示复数的模值。
55、进一步的,所述第j个散射点对应的检测窗内的回波矩阵tj表示为:
56、
57、其中,m表示第m个脉冲,n表示第n个采样点,α表示目标幅度,rj表示第j个散射点的初始距离,vj表示第j个散射点的速度,ρr表示雷达距离分辨率,fd表示目标的多普勒频率,tr表示脉冲重复周期,并且满足如下关系:
58、rj=ri+(j-1)ρr
59、vj=vi
60、其中,ri表示第i个参数点对应的初始距离,vi表示第i个参数点对应的速度;
61、所述雷达距离分辨率ρr表示为:
62、
63、其中,b表示带宽,c表示光速;
64、所述目标的多普勒频率fd表示为:
65、
66、其中,λ表示雷达发射的电磁波的波长,v表示目标相对于雷达的速度。
67、进一步的,所述门限阈值通过蒙特卡洛实验得到,所述蒙特卡洛实验中的杂波协方差矩阵c中的元素满足:
68、c(i,j)=σ2ρ|i-j|
69、其中,σ2表示杂波的平均功率,ρ表示一阶相关系数,i和j表示协方差矩阵c中的元素。
70、本发明的有益效果是:
71、本技术技术方案提出了一种广义匹配子空间检测器(gmsd),该检测器在高斯背景下具有对杂波的cfar特性,可以有效的补偿大型目标的距离走动效应,同时可以将大型目标在不同距离上分散的能量进行有效地积累,进而有效提高对大型目标的探测能力。
72、并且本技术技术方案还提出了一种快速计算的gmsd的方法,称之为简化的gmsd(sgmsd)检测器,该检测器通过近似简化计算gmsd过程中的矩阵运算,可以大大减少gmsd的运算量,实现gmsd的快速计算。
- 还没有人留言评论。精彩留言会获得点赞!