一种基于深度学习的波前测量系统和方法与流程
本发明属于波前测量,具体涉及一种基于深度学习的波前测量系统和方法。
背景技术:
1、大气中的湍流效应会导致光在大气中传输时出现光强起伏、光斑漂移等。这些效应会导致激光远场传输时激光传输能量集中度下降,导致光学成像系统分辨力下降。提高激光系统的光束质量、改善光学成像系统的分辨能力需要对大气湍流导致的像差畸变进行校正。在大气传输波前进行校正的前提是获得精确的波前信息。
2、现有技术主要是利用shack-hartmann波前探测器波前重建算法,来获取波前信息,然而这种技术需要利用光学信标和波前传感器实现,其成本高,且得到的波前信息有限。
3、现有技术还有基于深度学习的波前测量技术,其仅仅是对shack-hartmann波前重构算法进行改进,仍然需要借助于光学信标和波前传感器实现。
技术实现思路
1、针对现有技术需要借助于光学信标和波前传感器来实现波前信息测量的问题,本发明提供了一种基于深度学习的波前测量系统,本发明通过训练好的深度学习模型,仅需要利用图像传感器即可实现波前信息的测量,无需依赖于光学信标和波前传感器实现,节约了成本,同时能够获得更多的波前信息。
2、本发明通过下述技术方案实现:
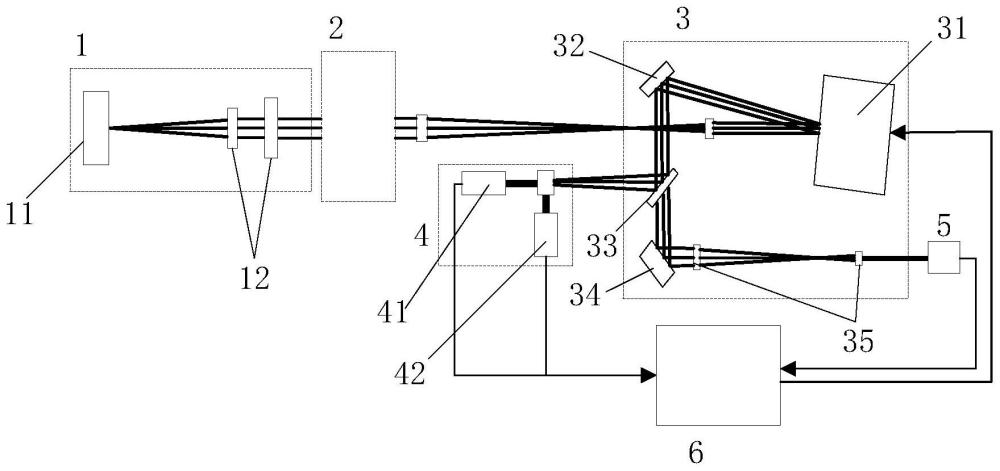
3、一种基于深度学习的波前测量系统,包括扩展目标模拟区、像差模拟区、中继光学镜组、图像传感器组、波前传感器和数据处理装置;
4、其中,所述扩展目标模拟区用于模拟物体,其发出的光束经过所述像差模拟区;
5、所述像差模拟区用于为所述扩展目标模拟区发出的光束产生随机像差;
6、所述中继光学镜组用于对携带像差的畸变波前进行调节之后分别送入所述图像传感器组和所述波前传感器;
7、所述图像传感器组用于接收所述中继光学镜组传输来的畸变波前,得到畸变后的图像信息;
8、所述波前传感器用于接收所述中继光学镜组传输来的畸变波前,解算得到所述像差模拟区产生的像差;
9、所述数据处理装置用于获取所述图像传感器组和所述波前传感器的输出信息以进行深度学习模型训练,并基于训练好的深度学习模型进行波前信息实时测量。
10、作为优选实施方式,本发明的扩展目标模拟区包括dmd和扩束系统;
11、所述dmd用于模拟物体;
12、所述扩束系统用于将所述dmd模拟的物体发出的光进行扩束之后传输至所述像差模拟区。
13、作为优选实施方式,本发明的中继光学镜组包括变形反射镜、第一反射镜、分光棱镜、第二反射镜和缩束镜;
14、所述变形反射镜将入射的所述畸变波前反射输入至所述第一反射镜;
15、所述第一反射镜将入射的畸变波前反射输入至所述分光棱镜;
16、所述分光棱镜将入射光分为两路,一路输入至所述图像传感器组;另一路依次经过第二反射镜、缩束镜输入至所述波前传感器。
17、作为优选实施方式,本发明的图像传感器组包括两路cmos相机;
18、一路cmos相机用于获取畸变后的聚焦面图像信息,另一路cmos相机用于获取畸变后的离焦面图像信息。
19、作为优选实施方式,本发明的波前探测器采用扩展目标哈特曼波前传感器。
20、作为优选实施方式,本发明的数据处理装置包括图像采集卡和计算机。
21、作为优选实施方式,本发明的深度学习模型采用深度卷积神经网络架构。
22、第二方面,本发明提出了基于上述波前测量系统的模型训练方法,包括:
23、通过扩展目标模拟区模拟物体发出的光束经所述像差模拟区,由所述像差模拟区产生随机像差;
24、携带像差的畸变波前输入至所述中继光学镜组进行调节并分为两路信号输出;
25、一路信号由所述图像传感器组采集得到畸变后的图像信息,另一路信号由所述波前传感器采集并解算得到所述像差模拟区的像差;
26、所述图像传感器组将得到的图像信息和所述波前传感器将得到的像差输入至所述数据处理装置,图像信息和像差构成训练数据对,其中,图像信息作为深度神经网络模型的输入,像差作为深度神经网络模型的输出;
27、通过改变所述扩展目标模拟区加载的目标图像和所述像差模拟区产生的随机像差,获得多个训练数据对作为训练数据集;
28、采用所述训练数据集训练所述深度神经网络模型,得到深度学习模型,用于波前信息实时测量。
29、第三方面,本发明提出了基于上述波前测量系统的波前信息测量方法,包括:
30、通过扩展目标模拟区模拟物体发出的光束经所述像差模拟区,由所述像差模拟区产生随机像差;
31、携带像差的畸变波前输入至所述中继光学镜组进行调节之后输入至所述图像传感器组;
32、由所述图像传感器组实时采集得到畸变后的图像信息并将其输入到所述数据处理装置;
33、所述畸变后的图像信息作为训练好的深度学习模型的输入,则所述深度学习模型输出波前信息,即实现波前信息测量。
34、作为优选实施方式,本发明的图像传感器组得到的图像信息包括聚焦面图像信息和离焦面图像信息。
35、本发明具有如下的优点和有益效果:
36、本发明提供的测量系统仅需要在训练深度学习模型时使用波前传感器解算数据作为训练数据,在实际测量过程中,不依赖于光学信标和波前传感器,即可快速准确的实现波前信息的测量。
37、本发明提供的测量系统能够获得更多的波前信息,且便于实现,结构简单,成本低。
技术特征:
1.一种基于深度学习的波前测量系统,其特征在于,包括扩展目标模拟区(1)、像差模拟区(2)、中继光学镜组(3)、图像传感器组(4)、波前传感器(5)和数据处理装置(6);
2.根据权利要求1所述的一种基于深度学习的波前测量系统,其特征在于,所述扩展目标模拟区(1)包括dmd(11)和扩束系统(12);
3.根据权利要求1所述的一种基于深度学习的波前测量系统,其特征在于,所述中继光学镜组(3)包括变形反射镜(31)、第一反射镜(32)、分光棱镜(33)、第二反射镜(34)和缩束镜(35);
4.根据权利要求1所述的一种基于深度学习的波前测量系统,其特征在于,所述图像传感器组(4)包括两路cmos相机;
5.根据权利要求1-4任一项所述的一种基于深度学习的波前测量系统,其特征在于,所述波前探测器(5)采用扩展目标哈特曼波前传感器。
6.根据权利要求1-4任一项所述的一种基于深度学习的波前测量系统,其特征在于,所述数据处理装置(6)包括图像采集卡和计算机。
7.根据权利要求1-4任一项所述的一种基于深度学习的波前测量系统,其特征在于,所述深度学习模型采用深度卷积神经网络架构。
8.基于权利要求1-7任一项所述的一种基于深度学习的波前测量系统的模型训练方法,其特征在于,包括:
9.基于权利要求1-7任一项所述的一种基于深度学习的波前测量系统的波前信息测量方法,其特征在于,包括:
10.根据权利要求9所述的波前信息测量方法,其特征在于,所述图像传感器组(4)得到的图像信息包括聚焦面图像信息和离焦面图像信息。
技术总结
本发明公开了一种基于深度学习的波前测量系统和方法,系统包括扩展目标模拟区、像差模拟区、中继光学镜组、图像传感器组、波前传感器和数据处理装置;扩展目标模拟区用于模拟物体;像差模拟区用于为扩展目标模拟区发出的光束产生随机像差;中继光学镜组用于对携带像差的畸变波前进行调节之后分别送入图像传感器组和波前传感器;图像传感器组用于得到畸变后的图像信息;波前传感器用于解算得到像差;数据处理装置用于获取图像传感器组和波前传感器的输出信息进行深度学习模型训练,并基于训练好的深度学习模型进行波前信息实时测量。本发明通过训练好的深度学习模型,利用图像传感器即可实现波前信息的测量,无需依赖于光学信标和波前传感器实现。
技术研发人员:胡流森,刘国栋,景亚曼,吴小龑,袁红
受保护的技术使用者:中国工程物理研究院流体物理研究所
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!