用于激光雷达系统的旋转单元和激光雷达系统的制作方法
本发明涉及一种用于激光雷达系统的旋转单元以及一种激光雷达系统。
背景技术:
1、在公开文献jp2017107085a中描述了一种用于激光雷达系统的旋转单元和一种激光雷达系统。该转单元具有多棱镜、无刷外转子电机和带有轴向轴承的旋转轴,其中,旋转轴相对于多棱镜进行运动。
技术实现思路
1、本发明的任务是,给出一种用于激光雷达系统的旋转单元以及相应的激光雷达系统。
2、该任务由独立权利要求的特征来解决。本发明的其他有益实施方式在从属权利要求中给出。
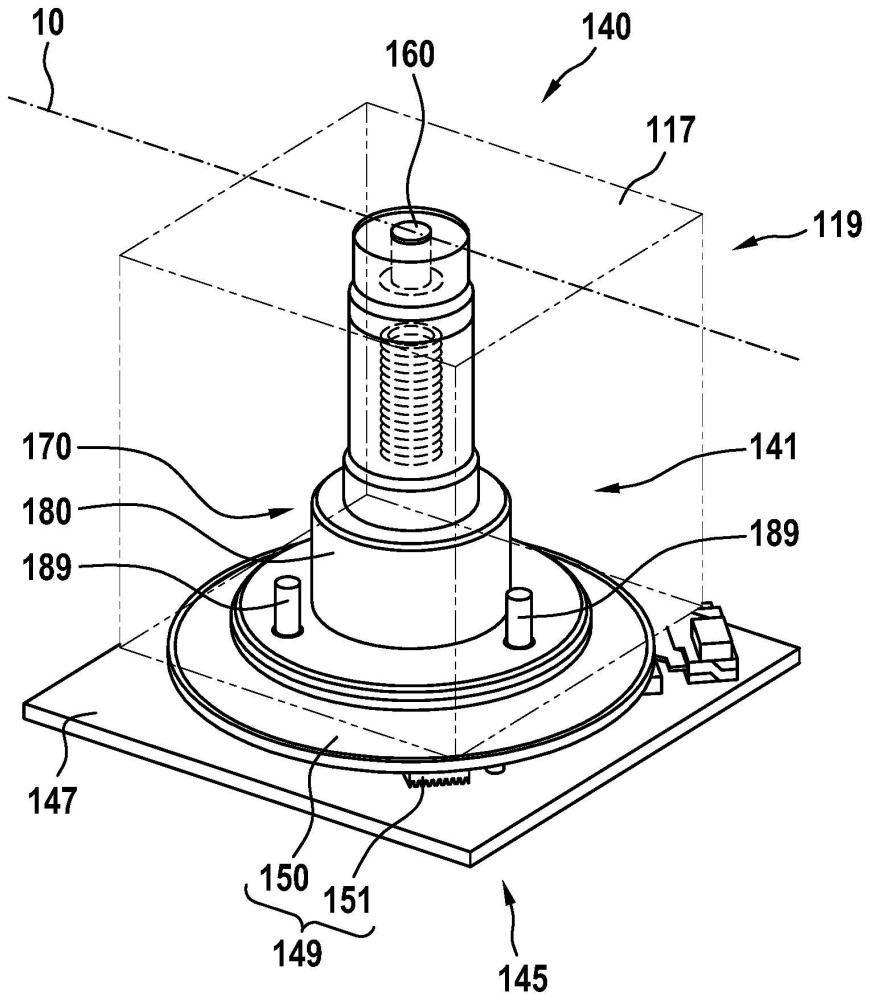
3、提出一种用于激光雷达系统的旋转单元,该旋转单元包括:
4、用于使激光束偏转的多棱镜,其中,所述多棱镜具有空腔,
5、无刷外转子电机,具有定子和转子,其中,定子和转子至少部分地布置在多棱镜的空腔内并且转子至少部分地与多棱镜连接;和
6、固定轴,所述固定轴布置在多棱镜的空腔内,其中,所述固定轴的第一区段与定子刚性连接,以使多棱镜相对于固定轴运动,例如围绕居中地穿过所述固定轴延伸的轴线。
7、从现有技术中已知在激光扫描仪(例如条形码阅读器,激光复印机/打印机和激光雷达系统)中的旋转单元,其中,旋转多棱镜(层式地)固定在平面微型电动机上,通常用螺钉或螺母固定。这种众所周知的旋转单元布置(其中通常附加地还使用旋转轴,使得旋转轴相对于多棱镜运动)的缺点是,在旋转镜的径向跳动方面精度低并且激光扫描装置或激光雷达系统的箱体高度显著,这是由部件、即镜在电机上的堆叠布置产生的。
8、而所提出的旋转单元允许更紧凑的构造形式,因为多棱镜的大小(宽度和深度)与电机部件(bldc电机)的大小协调,使得转子和定子可以至少部分地嵌入旋转的多棱镜中。这与使用固定轴相结合是有利的。
9、在另一实施方式中,旋转单元具有轴承单元,轴承单元具有第一轴承元件和第二轴承元件,这些轴承元件分别在无刷外转子电机的上方在多棱镜的空腔中在周侧布置在固定轴的第二区段和/或第三区段上。第一轴承元件是固定的而第二轴承元件是松动地构造的。第一轴承元件和第二轴承元件尤其形成球轴承。
10、为了能够提供尽可能紧凑但精确的旋转单元,如上所述,提出一种与轴承单元一起的固定轴,其中,轴承单元有利地定位在电机之外,但在多棱镜之内(在现有技术中轴承单元典型地是电机的一部分并且因此总体上导致较大的旋转单元尺寸)。所建议的第一和第二轴承元件有利地构造得坚固并且低磨损,并且可以有助于改善力承受,以使旋转单元能够稳定和精确地运动。
11、在另一实施方式中,在第一轴承元件和第二轴承元件之间在周侧在固定轴的第二区段和第三区段之间布置有弹簧单元,特别是螺旋弹簧,以便对轴承单元的第一轴承元件和/或第二轴承元件施加轴向预紧力。由此能够有利地实现部件的安全连接,以便旋转单元能够稳定和精确地运动。
12、在另一实施方式中,定子具有定子槽口,以便至少将固定轴的第一区段和/或固定轴的第二区段至少部分地接收在其中。这有利地能够实现旋转单元的紧凑结构形式,因为上述部件可以至少部分地嵌入多棱镜的空腔内。
13、在另一实施方式中,转子具有转子槽口,以便至少将固定轴的第一区段连同刚性连接的定子和/或将固定轴的第二区段接收到其中。转子槽口在此可以相当于转子空腔。这使得能够有利地实现旋转单元的紧凑结构形式,因为上述部件可以层式地彼此嵌套并且可以有利地相对彼此在中心布置,以便以这种方式减少多棱镜的径向跳动。
14、在另一实施方式中,外转子电机的电接触通过接触单元来进行。这使得能够简化旋转单元的运行。
15、在另一实施方式中,接触单元由一个换向器和多个接触元件、特别是弹簧触头形成。换向器布置在外转子电机和旋转单元的控制单元之间,并且具有换向器槽口,用于将固定轴的第一区段至少部分地接收在其中。换向器的第一端部具有多个在周侧布置的定子连接元件,特别是钩,这些定子连接元件分别与定子的绕组连接。所述多个接触元件分别与换向器的极区段在侧面连接。控制单元有电路板,电路板包括槽口。该槽口设计为用于将换向器的第二端部配合精确地接收到其中。
16、由此能够有利地实现“即插即用”式意义上的简单且成本有利的接触,因为所述部件可以被简单地组装并直接投入运行,而不必事先还要考虑例如呈扁平带状线缆形式的接触单元的取向。因此可以降低(工艺)成本并提高制造质量,因为不再需要定子和接触单元或电路板之间的手钎焊部位。因此还可以有利地提高生产中的自动化程度。
17、在另一实施方式中,换向器具有6个具有60°极宽的极区段。换向器的每个极区段分别配属有一个定子连接元件并且极区段分别与一个接触元件理解。这些接触元件分别在周侧在电路板上沿着槽口布置并与电路板连接。
18、bldc电机的定子通常具有3个电相,因此得到极数为6。每个极区段通过一个接触元件与电路板连接。在所示出的布置中,定子的绕组或定子的相线在电路板上星形(英语:wye)地或三角形(英语:delta)地通过电路板的或电路板印刷电路的适当布局而相互连接。这种布置的优点尤其是,相电流的星形接点位于电路板内部(而不是难以接近的定子中心)并且为了控制和/或维护目的而特别容易接近,或者可以直接在星形接点上连接电机控制装置。
19、在另一实施方式中,换向器具有3个具有120°极宽度的极区段。换向器的每个极区段分别配属有一个定子连接元件,极区段分别与一个接触元件连接。这些接触元件分别在周侧沿槽口布置在电路板上并与电路板连接。定子绕组或定子相线的星形或三角形连接可以直接在绕制过程中在定子绕组中建立。
20、在另一实施方式中,接触单元具有连接元件和插接元件。连接元件具有第一连接区段、第二连接区段和第三连接区段,这些连接区段分别连续地构造。第一连接区段与定子电连接,第三连接区段与插接元件电连接。连接元件例如可以以扁平带状电缆(或fpc电路)的形式构造而插接元件可以以zif插头或zif插接器的形式构造。因此可以有利地使用已知的允许简单和安全的电接触的部件。
21、在另一实施方式中,接触单元至少部分地布置在旋转单元的控制单元上。控制单元具有电路板,并且电路板包括彼此邻接的第一和第二槽口。第一槽口被设计为将定子在接收其中,第二槽口具有第一突起和第二突起,用于固定连接元件的第二连接区段。第一突起和第二突起对置地布置。这有利地能够改进这些部件的相互堆叠或层式的布置,并实现总体降低的旋转单元高度延伸尺寸。
22、在另一实施方式中,定子具有法兰形构造的基座,其中,法兰形基座设计为将固定轴的第一区段至少部分地固定地接收在其中。这有利地使得固定轴的第一区段能够简单可靠地固定在定子的基座内并且支持旋转单元的相互层叠的、节省空间的结构形式。
23、在另一实施方式中,固定轴的第一区段至少部分地固定在旋转单元的底部区段的固定单元中,特别是安装孔中。因此,所提出的旋转单元可以有利地更紧凑地制造,因为可以省略定子基座,该基座可能无法完全集成到多棱镜的空腔中。
24、在另一实施方式中,为了求取多棱镜的位置,使用控制单元的磁传感器单元,所述磁传感器单元包括磁性发送器轮和传感元件,和/或使用控制单元的光学传感器单元,所述光学传感器单元包括光学旋转发送器元件和传感元件。这使得为了旋转单元的运行能够实现简单可靠的角度位置检测。
25、在另一实施方式中,在转子和定子之间布置有径向气隙和/或在磁传感器单元的磁性发送器轮和传感元件之间布置有轴向气隙。
26、在转子和定子之间或者在转子的永磁体(例如以环形磁体的形式构造)和定子绕组(线圈)之间,可以布置径向气隙,这有利地使得带有磁体的转子能够相对于包括线圈的定子运动。由于轴向气隙,有利地可以使发送器轮相对于传感元件运动。上述气隙在其延伸尺寸方面可以这样小地确定大小,使得它们不会对旋转单元的紧凑结构形式产生负面影响。
27、在另一实施方式中,至少使用一个紧固元件用于至少部分地将转子与多棱镜连接。这有利地使得能够简单、稳定和成本有利地固定。
28、此外,还提出了一种激光雷达系统,具有:
29、用于产生激光束的发射单元,
30、按照上述任一实施方式旋转单元,具有多棱镜,所述多棱镜具有至少两个镜面,用于将激光束偏转到视场中和/或用于偏转在视场中反射的激光束;和
31、接收单元,用于探测在视场中反射的激光束。
32、这样可以有利地实现旋转单元或激光雷达系统的紧凑结构形式,使得激光雷达系统优化地适合在机动车或者说车辆中使用,在这些机动车或者说车辆中,用于此类传感器或者说扫描设备的安装空间通常是有限的或受限的。在所提出的旋转单元或激光雷达系统中,壳体的高度这样优化,使得镜面、光学活性面即作为主要功能可以利用可供使用的垂直空间的绝大部分,而轴承单元、电机、电机控制单元和角度位置感测等次要功能被布置为占用极小的垂直空间。
33、前面提到的和/或在从属权利要求中反映的本发明有益构型和扩展构型可以单独地或以任意相互组合地应用,除了例如在依赖关系明确或变型方案不相容的情况下以为。
- 还没有人留言评论。精彩留言会获得点赞!