一种基于联邦滤波的仿生偏振组合导航的方法和装置与流程
本技术涉及定位导航,尤其涉及一种基于联邦滤波的仿生偏振组合导航的方法、装置、计算机设备。
背景技术:
1、近年,微型惯性测量单元mimu与北斗导航与磁强计组合导航方法获取自身姿态、速度及位置信息,然而野外未知环境下,北斗系统易发生信号失锁、信号遮挡与干扰问题,地磁传感器易受矿藏、建筑和其他钢铁结构引起的磁场异常与罗差等干扰。
2、仿生偏振光导航技术是近十几年来兴起的一种导航误差不随时间积累、自主性强的导航技术。非洲沙蚁能够感知天空偏振光的分布模式,判断出其身体长轴相对于太阳子午线的夹角,然后根据当前时刻推算其地理系偏航角。仿生偏振导航技术具有无源无辐射、隐蔽性好、不受外界干扰、误差不随时间累积等特点,引入仿生偏振导航系统与捷联惯性、北斗、地磁导航系统进行组合,设计无重置型组合导航联邦滤波器,为野外地面导航系统受到环境未知、多源干扰的问题提供理论支持和技术方法,以保持导航系统的姿态精度与系统稳定性。
3、因此,可模仿沙蚁对偏振光的感知引入仿生偏振导航方式,将仿生偏振导航与捷联惯性导航、北斗导航、地磁导航系统进行组合,实现一种不受外界干扰、误差不随时间累积、保持导航系统精度和稳定的方法。
技术实现思路
1、基于此,有必要针对上述技术问题,提出一种基于联邦滤波的仿生偏振组合导航的方法和装置,解决易受外界信号干扰、误差随时间累积的问题。
2、第一方面,本技术实施例提供了一种基于联邦滤波的仿生偏振组合导航的方法,捷联惯导系统作为公共参考系统;北斗导航定位子滤波器、地磁导航子滤波器、仿生偏振导航子滤波器参照所述捷联惯导系统生成各个子滤波器数据;主滤波器接收所述各个子滤波器数据生成主滤波器数据,实施步骤包括:
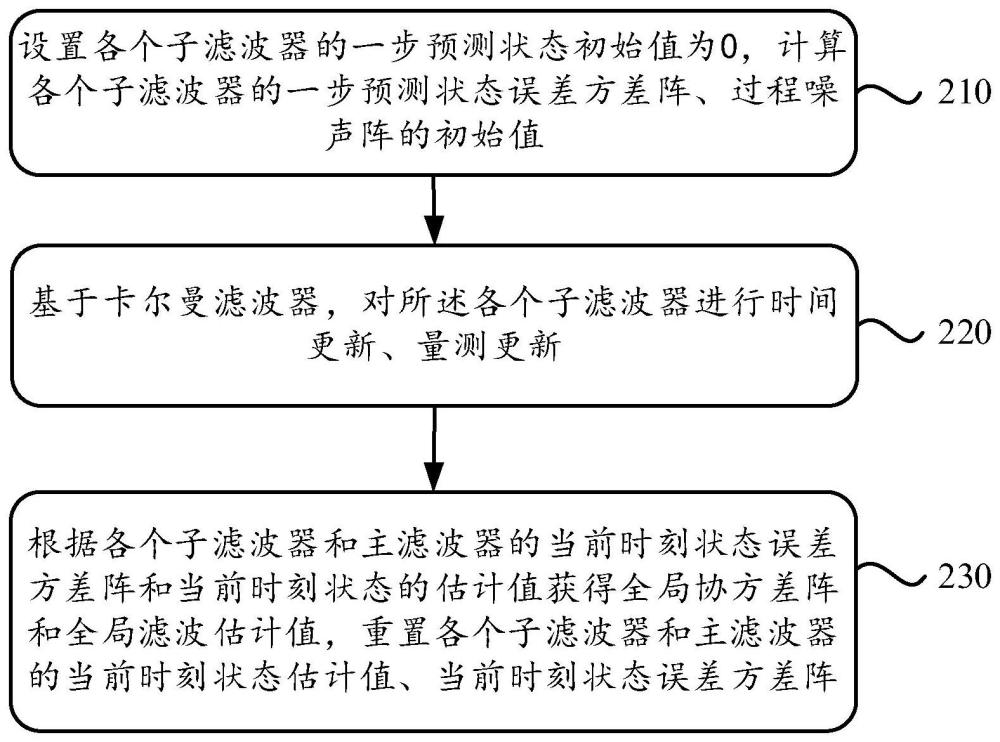
3、设置所述各个子滤波器的一步预测状态初始值为0,根据捷联惯导系统的协方差阵、过程噪声阵与所述各个子滤波器的信息分配系数的比值,确定所述各个子滤波器的一步预测状态误差方差阵、过程噪声阵的初始值;
4、基于卡尔曼滤波器,对所述各个子滤波器进行时间更新,获得更新后的一步预测状态与一步预测状态误差方差阵;对所述各个子滤波器进行量测更新,获得增益矩阵、当前时刻状态估计值和当前时刻状态误差方差阵;对所述主滤波器更新,获得更新后的当前时刻状态的估计值和当前时刻状态误差方差阵;
5、根据所述各个子滤波器和主滤波器的当前时刻状态误差方差阵和当前时刻状态的估计值获得全局协方差阵和全局滤波估计值;根据所述全局滤波估计值、全局协方差阵与滤波器信息分配系数的比值重置所述各个子滤波器和主滤波器的当前时刻状态估计值、当前时刻状态误差方差阵。
6、在其中一个实施例中,根据所述各个子滤波器和主滤波器同一时刻的当前时刻状态误差方差阵获得全局协方差,
7、
8、其中,为第i子滤波器的当前时刻状态误差方差阵,为主滤波器当前时刻状态误差方差阵,pg为全局协方差阵;
9、根据所述全局协方差阵、各个子滤波器和主滤波器的当前时刻状态误差方差阵获得全局滤波估计值,
10、
11、其中,为第i子滤波器的当前时刻状态的估计值,为主滤波器的当前时刻状态的估计值,为全局滤波估计值。
12、在其中一个实施例中,根据所述全局滤波估计值重置所述各个子滤波器和主滤波器的当前时刻状态估计值,
13、
14、其中,为全局滤波估计值,为各个子滤波器和主滤波器的当前时刻状态估计值;
15、根据所述全局协方差阵与滤波器信息分配系数的比值重置所述各个子滤波器和主滤波器的当前时刻状态误差方差阵,
16、
17、其中,pg为全局协方差阵,βi为滤波器信息分配系数,为各个子滤波器和主滤波器的当前时刻状态误差方差阵。
18、在其中一个实施例中,对各个子滤波器进行时间更新,得到更新后的一步预测状态与一步预测状态误差方差阵;
19、对各个子滤波器进行量测更新,根据一步预测状态误差方差阵获得增益矩阵,根据一步预测状态获得当前时刻状态估计值,根据一步预测状态误差方差阵获得当前时刻状态误差方差阵;
20、对主滤波器更新,当前时刻状态的估计值被前一个当前时刻状态估计值所更新,当前时刻状态误差方差阵被前一个当前时刻状态误差方差阵所更新。
21、在其中一个实施例中,北斗导航定位子滤波器由第一状态方程和第一量测方程构成,其中,所述第一状态方程基于捷联惯导状态向量构成,所述第一量测方程基于惯导状态向量和北斗定位构成;
22、地磁导航子滤波器由第二状态方程和第二量测方程构成,其中,所述第二状态方程基于捷联惯导系统的3维失准角、陀螺的3维常值漂移状态量、加速度计的3维干扰量、磁强计的3维干扰量构成,所述第二量测方程基于加速度计和磁强计的量测输出与基于捷联惯导的载体系下重力加速度矢量和磁矢量之差构成;
23、仿生偏振导航子滤波器由第三状态方程和第三量测方程构成,其中,所述第三状态方程基于捷联惯导系统的3维失准角、陀螺的3维常值漂移状态量、加速度计的3维干扰量构成,所述第三量测方程基于加速度计和磁强计的量测输出与基于捷联惯导的载体系下重力加速度矢量和太阳矢量之差构成。
24、在其中一个实施例中,搭建第三状态方程,
25、
26、其中,f3为系统状态转移矩阵,x3为状态量,w3为系统噪声矢量,g3为系统的噪声转移矩阵,其中,状态量为捷联惯导系统的3维失准角、陀螺的3维常值漂移状态量、加速度计的3维干扰量构成;
27、搭建第三量测方程,
28、
29、其中,为载体系重力加速度矢量,为载体系下加速度计输出数据,为捷联惯导计算的三轴太阳矢量,为载体系下偏振传感器的输出数据,z3(t)为量测方程的输出。
30、在其中一个实施例中,构建偏振方向为0、三个偏振检测通道的检测单元,其中,所述偏振检测通道包含一个滤光片、一个偏振分光棱镜和两个光电转换芯片;
31、所述电转换芯片将各个偏振检测通道的偏振光分成两束并转化为数字信号,解算所述数字信号得到天空点的偏振方位角和偏振度;
32、根据天文年历计算方法计算太阳高度角与方位角得到地理系下的单位太阳矢量,根据所述地理系下的单位太阳矢量解算得到三轴太阳矢量
33、根据所述天空点的偏振方位角和偏振度得到模块系下单位太阳矢量,根据所述模块系下单位太阳矢量解算得到载体系下偏振传感器的输出数据
34、在其中一个实施例中,用于确定联邦滤波器结构的主滤波器的信息分配系数设置为0。
35、第二方面,本技术还提供了一种基于联邦滤波的仿生偏振组合导航装置,该装置包括:
36、捷联惯导系统模块、北斗导航定位子滤波器模块、地磁导航子滤波器模块、仿生偏振导航子滤波器模块;
37、所述捷联惯导系统模块,向所述北斗导航定位子滤波器模块、地磁导航子滤波器模块、仿生偏振导航子滤波器模块提供公共参考数据;
38、所述北斗导航定位子滤波器模块,由基于捷联惯导状态向量的状态方程,和,基于惯导状态向量和北斗定位的量测方程所构成;
39、所述地磁导航子滤波器模块,由基于捷联惯导系统的3维失准角、陀螺的3维常值漂移状态量、加速度计的3维干扰量、磁强计的3维干扰量的状态方程,和,基于加速度计和磁强计的量测输出与基于捷联惯导的载体系下重力加速度矢量和磁矢量之差的量测方程所构成;
40、所述仿生偏振导航子滤波器模块,由基于捷联惯导系统的3维失准角、陀螺的3维常值漂移状态量、加速度计的3维干扰量的状态方程,和,基于加速度计和磁强计的量测输出与基于捷联惯导的载体系下重力加速度矢量和太阳矢量之差的量测方程所构成;
41、所述主滤波器模块,包括融合各个子滤波器和主滤波器的当前时刻状态误差方差阵和当前时刻状态的估计值的融合模块,和,重置当前时刻状态估计值和当前时刻状态误差方差阵的重置模块。
42、第三方面,本技术实施例提供一种计算机设备,包括存储器,处理器及存储在存储器上并可在处理器运行的计算机程序,处理器执行计算机程序时实现上述第一方面中任一实施例提供的方法的步骤。
43、本技术实施例采用的上述至少一个技术方案能够达到以下有益效果:首先将捷联惯导系统作为公共参考系统,北斗导航定位子滤波器、地磁导航子滤波器、仿生偏振导航子滤波器参照捷联惯导系统生成各个子滤波器数据,主滤波器接收各个子滤波器数据生成主滤波器数据。在定位导航过程中,基于卡尔曼滤波器实时对各个子滤波器进行时间更新和量测更新,并将主滤波器设置为无重置型,在主滤波器中对各个子滤波器和主滤波器的当前时刻状态误差方差阵和当前时刻状态的估计值进行数据融合以及重置。从而将仿生偏振导航与捷联惯导系统、北斗导航、地磁导航进行组合,构成无重置型联邦滤波器,在北斗系统发生信号失锁和信号遮挡与干扰、地磁传感器易受矿藏和建筑的磁场异常干扰的情况下,可以通过仿生偏振导航保持导航系统的姿态精度与系统稳定性。
- 还没有人留言评论。精彩留言会获得点赞!