一种地图路线匹配方法及系统与流程
本发明属于高精度地图领域,尤其涉及一种地图路线匹配方法及系统。
背景技术:
1、车载/手机导航系统使用的数据是普通的地图数据,车辆自动驾驶使用的是高精度地图。因为采集、制作、规范等方面不同,普通地图数据与高精度地图不一致,而由于地图数据差异,普通地图导航系统生成的路线,无法直接在高精度地图应用,必须要先与高精度地图匹配,转换为相对应的路线才能应用。
2、普通地图与高精度地图存在着多方面的差异,如道路形状差异,坐标精度差异,路口构建差异,道路切割差异,数据及时性差异等。若直接基于导航路线特征进行匹配或直接进行形点投影后匹配,会导致匹配准确性、可靠性较差。
技术实现思路
1、有鉴于此,本发明实施例提供了一种地图路线匹配方法及系统,用于解决现有地图路线匹配准确度及可靠性差的问题。
2、在本发明实施例的第一方面,提供了一种地图路线匹配方法,包括:
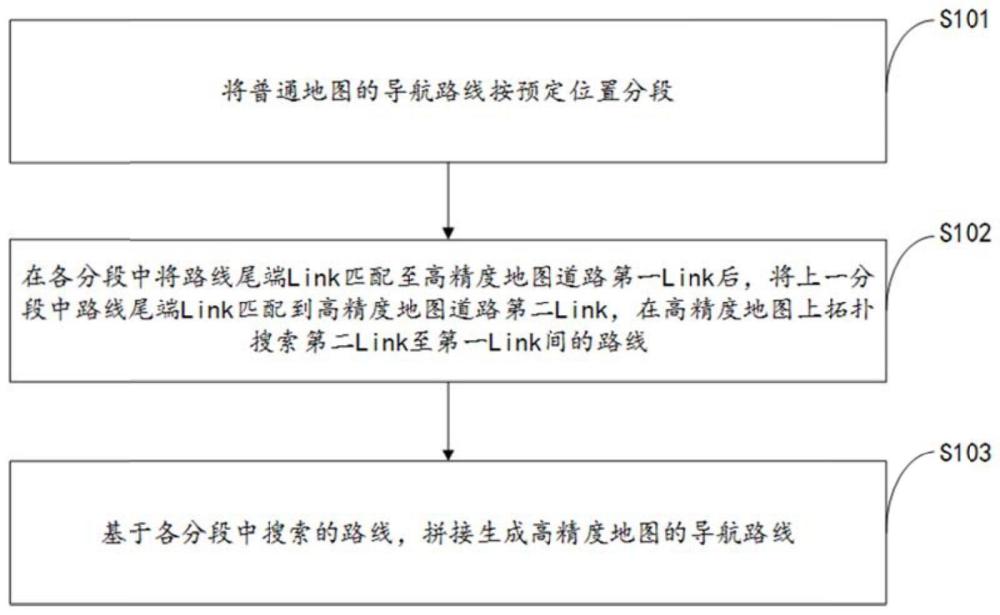
3、将普通地图的导航路线按预定位置分段;
4、在各分段中将路线尾端link匹配至高精度地图道路第一link后,将上一分段中路线尾端link匹配到高精度地图道路第二link,在高精度地图上拓扑搜索第二link至第一link间的路线;
5、其中,当上一分段为第一分段或上一分段存在高精度地图缺失,则由当前分段路线首端link向后匹配至高精度地图道路第二link;
6、基于各分段中搜索的路线,拼接生成高精度地图的导航路线。
7、在本发明实施例的第二方面,提供了一种地图路线匹配系统,包括:
8、路线划分模块,用于将普通地图的导航路线按预定位置分段;
9、分段匹配模块,用于在各分段中将路线尾端link匹配至高精度地图道路第一link后,将上一分段中路线尾端link匹配到高精度地图道路第二link,在高精度地图上拓扑搜索第二link至第一link间的路线;
10、其中,当上一分段为第一分段或上一分段存在高精度地图缺失,则由当前分段路线首端link向后匹配至高精度地图道路第二link;
11、拼接模块,用基于各分段中搜索的路线,拼接生成高精度地图的导航路线。
12、在本发明实施例的第三方面,提供了一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器运行的计算机程序,所述处理器执行所述计算机程序时实现如本发明实施例第一方面所述方法的步骤。
13、在本发明实施例的第四方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现本发明实施例第一方面提供的所述方法的步骤。
14、本发明实施例中,通过将普通地图导航路线分段后,分段在高精度地图上基于首尾li nk进行拓扑搜索,将分段路线匹配至高精度地图,相较于直接进行li nk匹配或直接进行路线形点投影,不仅匹配效率高、速度快,而且能够保障匹配的准确性、可靠性,同时,能包容数据差异,适应多种匹配场景。
技术特征:
1.一种地图路线匹配方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述在高精度地图上拓扑搜索第二link至第一link间的路线包括:
3.根据权利要求1所述的方法,其特征在于,所述在高精度地图上拓扑搜索第二link至第一link间的路线还包括:
4.根据权利要求1所述的方法,其特征在于,所述在各分段中将路线尾端link匹配至高精度地图道路第一link后,将上一分段中路线尾端link匹配到高精度地图道路第二link,在高精度地图上拓扑搜索第二link至第一link间的路线还包括:
5.一种地图路线匹配系统,其特征在于,包括:
6.根据权利要求5所述的系统,其特征在于,所述在高精度地图上拓扑搜索第二link至第一link间的路线包括:
7.根据权利要求5所述的系统,其特征在于,所述分段匹配模块包括:
8.根据权利要求5所述的系统,其特征在于,所述分段匹配模块还包括:
9.一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至4任一项所述的一种地图路线匹配方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被执行时实现如权利要求1至4任一项所述的一种地图路线匹配方法的步骤。
技术总结
本发明提供一种地图路线匹配方法及系统,该方法包括:将普通地图的导航路线按预定位置分段;在各分段中将路线尾端Link匹配至高精度地图道路第一Link后,将上一分段中路线尾端Link匹配到高精度地图道路第二Link,在高精度地图上拓扑搜索第二Link至第一Link间的路线;其中,当上一分段为第一分段或上一分段存在高精度地图缺失,则由当前分段路线首端Link向后匹配至高精度地图道路第二Link;基于各分段中搜索的路线,拼接生成高精度地图的导航路线。通过该方案可以提高普通地图与高精度地图路线匹配的准确性和可靠性,且匹配效率高。
技术研发人员:尹玉成,韩江峰,万木春,张志军
受保护的技术使用者:武汉中海庭数据技术有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!