边坡监测预警方法、计算机可读储存介质及计算机设备与流程
本发明涉及边坡形变监测,具体涉及一种边坡监测预警方法、计算机可读储存介质及计算机设备。
背景技术:
1、边坡形变监测雷达是一种地基合成孔径雷达,基于电磁波干涉测量原理,实现非接触式形变测量,具有监测精度高、范围广等特点,是一种新型的地质灾害监测手段,已经在矿山露天采场、高陡边坡、建筑物稳定性监测等多方面得到应用,取得了良好的监测效果。边坡形变监测雷达的原始监测数据是二维的极坐标图像,图像上每个像素都对应该像素距离雷达天线的距离和水平方位角,通过干涉测量,可以获取图像上每个像素的形变值。
2、由于缺少竖直方位向信息,因此边坡形变监测雷达的像素无法与三维地理坐标一一对应。而且雷达数据分辨率较低,且极坐标下每个像素的实际空间大小是不同的,直接使用二维极坐标系的形变表达方式很难理解形变发生的区域和规模。为了更好的表示边坡形变的真实情况,往往需要将二维雷达图像(极坐标)映射至三维空间(地理坐标)。目前主流的方法是将二维雷达图像映射至三维点云数据或者映射至数字高程模型(dem)。
3、采用三维点云数据将边坡形变雷达图像数据映射至三维空间的方法,其计算量比较大、但其可视化效果更逼真,一般是根据三维点云的空间坐标值和雷达坐标值计算该三维点对应的距离值和方位值,然后根据边坡形变监测雷达的距离向分辨率和方位向分辨率在三维点云坐标与边坡形变监测雷达的二维图像像素坐标之间建立对应关系。但是由于点云数据密度大,往往三维点云对应的距离值和方位值不会等于雷达图像的像素点中心值,因此,直接将雷达图像对应的形变值赋给三维点会导致可视化的边坡形变变化不平滑,会有突变,不符合实际情况。采用dem数据将边坡形变图像数据映射至三维空间的方法,其计算量较小,但是在高程变化剧烈的区域可视化效果欠佳。
4、在进行预警时,目前的方法一般是比较每个三维点的形变值是否超过预警阈值,然后进行预警。由于边坡形变监测雷达的数据是高频数据、数据值震荡比较严重,所以这样的方式预警容易误报警。因此,结合形变预警的面积属性能够提供预警的准确性,但在预警发布计算预警区域的面积大小时,上述两种数据映射方法在后续的预警也有其他不足之处,三维点云的表面积计算需要构建mesh网格,其算法复杂度和点云的数量呈正相关,随着点云密度的上升其计算时间开销越来越大,而dem数据在计算面积时计算的面积是水平面积且随着dem数据精度的下降其计算精度也越来越低。
5、综上所述,急需一种实现预警区域面积快速计算的边坡形变监测方法以解决现有技术中存在的问题。
技术实现思路
1、本发明目的在于提供一种边坡监测预警方法,通过空间插值方法建立三维点云中各个三维点和二维雷达图像各个像素的对应关系,对边坡形变监测雷达监测范围内的点云赋上形变值,然后通过重心坐标插值法将三维点云网格化,实现预警区域面积快速计算。具体方案如下:
2、一种边坡监测预警方法,包括如下步骤:
3、步骤一、获取雷达监测范围内的边坡监测数据,边坡监测数据包含原始雷达图像;
4、步骤二、根据步骤一所得边坡监测数据计算雷达监测范围内每个三维点的形变值;
5、步骤三、将获得形变值的三维点云数据在平面上进行网格化,获得(row+1)×(col+1)个网格顶点,row、col分别为网格的行数和列数;对所有网格顶点进行遍历插值,计算网格顶点对应的高程值和形变值;
6、步骤四、根据形变预警阈值条件判断网格顶点的形变是否达到预警条件,将达到预警条件所对应网格顶点全部提取出来用于计算预警区域面积;
7、步骤五、根据步骤四所得预警区域面积及所对应的形变信息进行预警。
8、优选的,所述步骤二中计算雷达监测范围内每个三维点的形变值具体包括如下步骤:
9、步骤2.1、根据三维点p的坐标(xp,yp,zp)、雷达的地理坐标(x0,y0)、雷达的距离向分辨率rn以及雷达的方位向分辨率θn计算三维点p对应的极坐标(rp,θp);删除不在雷达监测区域内的三维点;
10、步骤2.2、将原始雷达图像各个边的像素往外填充1个像素,填充的像素形变值等于对应边像素的形变值;
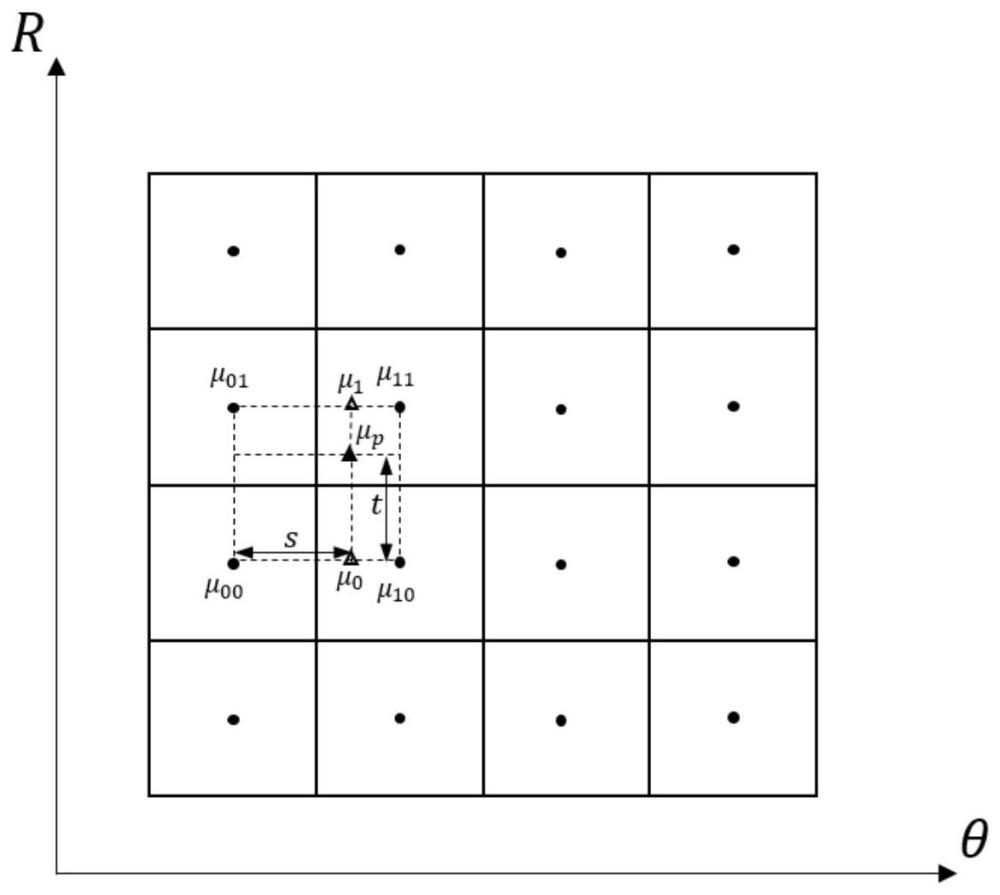
11、步骤2.3、查询与(rp,θp)距离最近的四个雷达图像像素中心点并记录三维点p和这四个像素值的对应关系;通过插值计算三维点p的形变值μp,具体是:μp=μ0+t(μ1-μ0);
12、其中:μ0=μ00+s(μ10-μ00);μ1=μ01+s(μ11-μ01);μ00、μ01、μ10、μ11分别表示这四个雷达像素(r00,θ00)、(r01,θ01)、(r10,θ10)、(r11,θ11)的形变值。
13、优选的,所述步骤三具体包括:
14、步骤3.1、确定网格的尺寸δ,设三维点云平面坐标的最小值和最大值分别为(xl,yl)和(xf,yf),计算网格的行数row和列数col:
15、其中:math.ceiling表示向上取整;
16、步骤3.2、网格化后会获取(row+1)×(col+1)个网格顶点,网格顶点gij的坐标为(xij,yij),其中:xij=xl+j·δ,yij=yl+i·δ;0≤i≤row,0≤j≤col;
17、步骤3.3、对所有网格顶点进行遍历插值,计算网格顶点对应的高程值和形变值。
18、优选的,所述步骤3.3具体是:
19、设网格顶点为g,其平面坐标为(xg,yg),在三维点云中求与网格顶点g平面距离最近的k个三维点组成点集合{pk},k取大于5的自然数;新建一个空的点集合{pv},进行如下步骤处理:
20、步骤3.3.1、取{pk}中与网格顶点g最近的三个点pa、pb、pc,将这三个点加入{pv},并从{pk}中删除这三个点;
21、步骤3.3.2、基于向量叉积计算三个向量之间的va、vb和vc;
22、步骤3.3.3、根据va、vb、vc判断三点pa、pb、pc是否在网格顶点g的同一侧,具体是:
23、如果va、vb、vc均为负数,则进入步骤3.3.4;
24、如果va、vb、vc均为0,则从pa、pb、pc中删除距离网格顶点g最近的点,然后从{pk}中再选一个点并把这个点加入{pv},同时从{pk}中删除这个点,重新组成pa、pb、pc,进入步骤3.3.2;
25、如果va、vb、vc有两个值为0,则从值为0的两个点中删除距离网格顶点g最近的点,然后从{pk}中再选一个点并把这个点加入{pv},同时从{pk}中删除这个点,重新组成pa、pb、pc,进入步骤3.3.2;
26、如果va、vb、vc有两个值为正且一个值为负,则删除负值所对应的点,然后从{pk}中再选一个点并把这个点加入{pv},同时从{pk}中删除这个点,重新组成pα、pb、pc,进入步骤3.3.2;
27、步骤3.3.4、得到网格顶点g周围最佳的三个三维点,网格顶点g必在这三个三维点组成的三角形内部;利用重心坐标插值法计算网格顶点g的高程值zg、形变值μg。
28、优选的,若{pk}中的点个数为0,则在三维点云中删除{pv}中的点后再求与网格顶点g平面距离最近的k个三维点,重新组成{pk},进入步骤3.3.1。
29、优选的,所述步骤3.3.4中利用重心坐标插值法计算网格顶点g的高程值zg、形变值μg具体是:
30、设网格顶点g对应的三个三维点为a、b、c,坐标分别为(xa,ya,za)、(xb,yb,zb)、(xc,yc,zc),对应的形变值分别为μa、μb、μc,则有:
31、zg=α·za+β·zb+γ·zc;μg=α·μa+β·μb+γ·μc;
32、其中:γ=1-α-β。
33、优选的,所述步骤3.3.2中:
34、
35、优选的,所述步骤四中计算预警区域面积具体是:
36、遍历所有网格,计算每个网格gridij的预警面积areaij,其中0<i≤row、0<j≤col,则预警区域面积areawarn=∑areaij;
37、每个网格gridij的预警面积areaij的计算具体如下:
38、如果网格gridij对应的四个顶点达到预警的顶点个数小于3,则该网格的预警面积areaij=0;
39、如果网格gridij对应的四个顶点达到预警的顶点个数等于3,则预警的三个顶点组成一个三角形g00g01g11,则该网格的预警面积
40、如果网格gridij对应的四个顶点达到预警的顶点个数等于4,四个顶点分别为g00、g01、g11、g10,则该网格的预警面积
41、本发明还公开一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序适用于由处理器加载并执行上述边坡监测预警方法。
42、本发明还公开一种计算机设备,所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,运行上述边坡监测预警方法。
43、除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
- 还没有人留言评论。精彩留言会获得点赞!