设备运动状态检测、零漂校正参数预测方法、装置及系统与流程
本发明涉及人工智能,尤其涉及一种设备运动状态检测、零漂校正参数预测方法、装置及系统。
背景技术:
1、重力加速度传感器数据的处理方法对于后续速度和距离的计算准确度是重要的。相关技术中,可以是将重力加速度传感器的三轴分别置于竖直方向,然后计算相应的三轴零漂校正数据。然而,上述方式获得的三轴零漂校正数据的精确度有待提升。
技术实现思路
1、本说明书实施方式旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本说明书实施方式提出一种设备运动状态检测、零漂校正参数预测方法、装置及系统。
2、本说明书实施方式提供一种设备运动状态检测方法,所述方法包括:
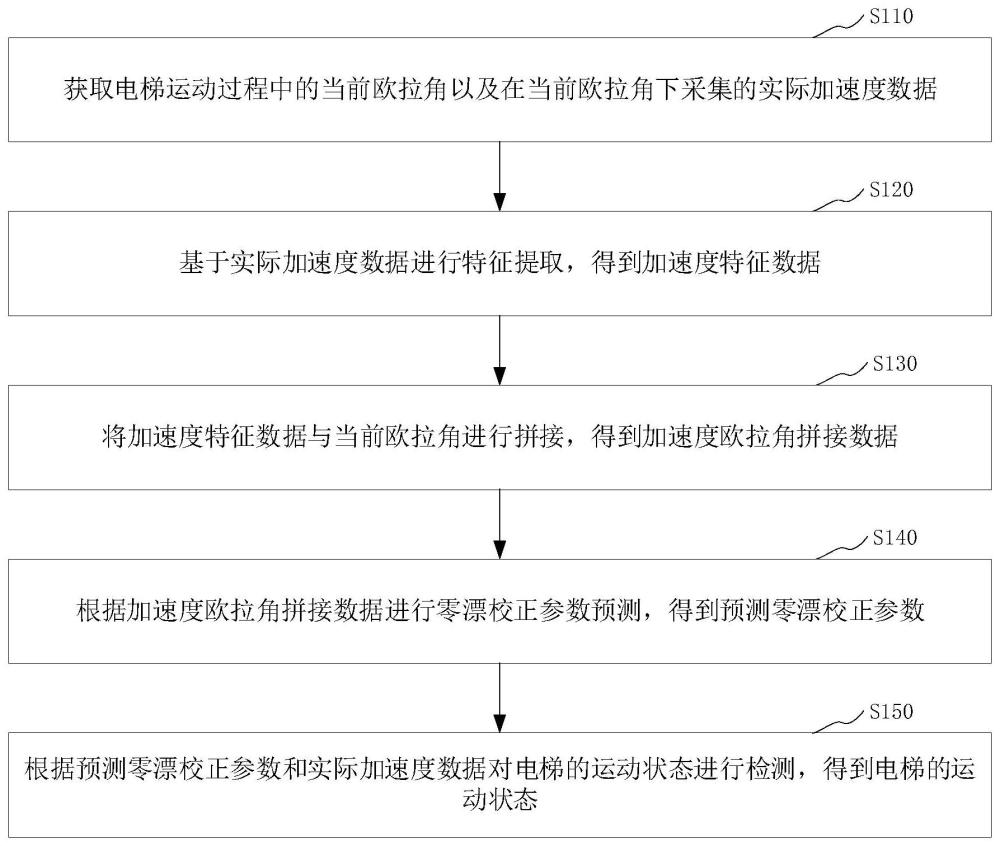
3、获取电梯运动过程中的当前欧拉角以及在所述当前欧拉角下采集的实际加速度数据;
4、基于所述实际加速度数据进行特征提取,得到加速度特征数据;
5、将所述加速度特征数据与所述当前欧拉角进行拼接,得到加速度欧拉角拼接数据;
6、根据所述加速度欧拉角拼接数据进行零漂校正参数预测,得到预测零漂校正参数;
7、根据所述预测零漂校正参数和所述实际加速度数据对所述电梯的运动状态进行检测,得到所述电梯的运动状态。
8、在其中一个实施方式,所述预测零漂校正参数是通过目标零漂校正模型进行预测得到的,所述目标零漂校正模型包括卷积批归一化激活模块;所述基于所述实际加速度数据进行特征提取,得到加速度特征数据,包括:
9、将所述实际加速度数据输入至所述卷积批归一化激活模块中依次进行卷积处理、批归一化和激活处理,得到所述加速度特征数据。
10、在其中一个实施方式,所述目标零漂校正模型还包括展开模块和全连接批归一化激活模块;所述根据所述加速度欧拉角拼接数据进行零漂校正参数预测,得到预测零漂校正参数,包括:
11、将所述加速度欧拉角拼接数据输入至所述展开模块,得到加速度欧拉角展开数据;
12、将所述加速度欧拉角展开数据输入至全连接批归一化激活模块中依次进行全连接处理、批归一化和激活处理,得到所述预测零漂校正参数。
13、在其中一个实施方式,所述预测零漂校正参数是通过目标零漂校正模型进行预测得到的,通过以下方式得到所述目标零漂校正模型:
14、搭建初始零漂校正模型;
15、获取重力加速度传感器的测量零漂校正参数;
16、将所述重力加速度传感器进行随机转动,得到对应的样本欧拉角;
17、基于随机转动后的重力加速度传感器进行数据采集,得到样本加速度数据;
18、以所述测量零漂校正参数为标签,基于所述样本欧拉角以及所述样本加速度数据对所述初始零漂校正模型进行训练,得到所述目标零漂校正模型。
19、在其中一个实施方式,所述根据所述预测零漂校正参数和所述实际加速度数据对所述电梯的运动状态进行检测,得到所述电梯的运动状态,包括:
20、利用所述预测零漂校正参数对所述实际加速度数据进行零漂校正,得到校正后加速度数据;
21、基于所述校正后加速度数据对所述电梯的运动过程进行异常检测,得到所述电梯的运动状态。
22、在其中一个实施方式,所述基于所述校正后加速度数据对所述电梯的运动过程进行异常检测,得到所述电梯的运动状态,包括:
23、对所述校正后加速度数据进行平滑处理,得到平滑后加速度数据;
24、基于所述平滑后加速度数据对所述电梯的运动过程进行异常检测,得到所述电梯的运动状态。
25、在其中一个实施方式,在所述对所述校正后加速度数据进行平滑处理,得到平滑后加速度数据之前,所述方法还包括:
26、确定滑窗大小、用于对滑窗内元素进行排序的目标排序算法,以及用于计算滑窗内元素的均值的元素个数;
27、所述对所述校正后加速度数据进行平滑处理,得到平滑后加速度数据,包括:
28、根据所述滑窗大小、所述目标排序算法以及所述元素个数,对所述校正后加速度数据进行平滑处理,得到所述平滑后加速度数据。
29、在其中一个实施方式,所述根据所述滑窗大小、所述目标排序算法以及所述元素个数,对所述校正后加速度数据进行平滑处理,得到所述平滑后加速度数据,包括:
30、根据所述滑窗大小,利用所述校正后加速度数据对所述滑窗进行填充;
31、基于所述目标排序算法对填充后的滑窗内元素进行排序;
32、从排序后的滑窗内元素中获取用于计算所述均值的且数量为所述元素个数的目标元素;
33、基于所述目标元素确定所述平滑后加速度数据。
34、在其中一个实施方式,所述基于所述平滑后加速度数据对所述电梯的运动过程进行异常检测,得到所述电梯的运动状态,包括:
35、基于所述平滑后加速度数据确定所述电梯在运动方向上的运动速度;
36、根据所述电梯在运动方向上的运动速度判断所述电梯是否超速和/所述电梯是否急停,得到所述电梯的运动状态。
37、在其中一个实施方式,所述基于所述平滑后加速度数据对所述电梯的运动过程进行异常检测,得到所述电梯的运动状态,包括:
38、基于所述平滑后加速度数据确定所述电梯在运动方向上的运动加速度;
39、根据所述电梯在运动方向上的运动加速度判断所述电梯是否急停,得到所述电梯的运动状态。
40、在其中一个实施方式,所述基于所述平滑后加速度数据对所述电梯的运动过程进行异常检测,得到所述电梯的运动状态,包括:
41、基于所述平滑后加速度数据确定所述电梯在与运动方向垂直的平面上的分量加速度;
42、根据所述分量加速度判断所述电梯是否抖动,得到所述电梯的运动状态。
43、在其中一个实施方式,所述方法还包括:
44、基于所述平滑后加速度数据确定所述电梯在运动方向上的运动加速度;
45、根据所述电梯在运动方向上的运动加速度进行积分运算,得到所述电梯在运动方向上的运动速度;
46、基于所述运动速度的绝对值进行积分运算,得到所述电梯的连续运行距离。
47、在其中一个实施方式,所述方法还包括:
48、获取针对所述电梯内部进行拍摄得到的电梯内部图像;
49、对所述电梯内部图像进行分割处理,得到位于所述电梯内部的目标对象;
50、若所述目标对象的类别满足预设提醒条件,触发所述目标对象对应的提醒信息的发送。
51、在其中一个实施方式,若所述目标对象的类别满足预设提醒条件,触发所述目标对象对应的提醒信息的发送,至少包括以下之一:
52、若检测到所述目标对象为火焰类别,触发所述火焰类别对应的报警信息的发送;
53、若检测到所述目标对象为违禁品类别,触发所述违禁品类别对应的报警信息的发送。
54、在其中一个实施方式,所述方法还包括:
55、获取针对所述电梯内部进行拍摄得到的电梯内部图像;
56、对所述电梯内部图像进行分割处理,得到位于所述电梯内部的目标对象;
57、若所述目标对象为人员,从所述电梯内部图像提取所述人员对应的目标人员图像;
58、基于所述目标人员图像进行分类处理,得到所述人员的异常行为数据;
59、触发所述异常行为数据对应的提醒语音的播放。
60、本说明书实施方式提供一种零漂校正参数预测方法,所述方法包括:
61、获取目标对象在运动过程中的当前欧拉角以及在所述当前欧拉角下采集的实际加速度数据;
62、基于所述实际加速度数据进行特征提取,得到加速度特征数据;
63、将所述加速度特征数据与所述当前欧拉角进行拼接,得到加速度欧拉角拼接数据;
64、根据所述加速度欧拉角拼接数据进行零漂校正参数预测,得到预测零漂校正参数。
65、在其中一个实施方式,所述预测零漂校正参数是通过目标零漂校正模型进行预测得到的,所述目标零漂校正模型包括卷积批归一化激活模块;所述基于所述实际加速度数据进行特征提取,得到加速度特征数据,包括:
66、将所述实际加速度数据输入至所述卷积批归一化激活模块中依次进行卷积处理、批归一化和激活处理,得到所述加速度特征数据。
67、在其中一个实施方式,所述目标零漂校正模型还包括展开模块和全连接批归一化激活模块;所述根据所述加速度欧拉角拼接数据进行零漂校正参数预测,得到预测零漂校正参数,包括:
68、将所述加速度欧拉角拼接数据输入至所述展开模块,得到加速度欧拉角展开数据;
69、将所述加速度欧拉角展开数据输入至全连接批归一化激活模块中依次进行全连接处理、批归一化和激活处理,得到所述预测零漂校正参数。
70、在其中一个实施方式,所述预测零漂校正参数是通过目标零漂校正模型进行预测得到的,通过以下方式得到所述目标零漂校正模型:
71、搭建初始零漂校正模型;
72、获取重力加速度传感器的测量零漂校正参数;
73、将所述重力加速度传感器进行随机转动,得到对应的样本欧拉角;
74、基于随机转动后的重力加速度传感器进行数据采集,得到样本加速度数据;
75、以所述测量零漂校正参数为标签,基于所述样本欧拉角以及所述样本加速度数据对所述初始零漂校正模型进行训练,得到所述目标零漂校正模型。
76、本说明书实施方式提供一种异构芯片,所述异构芯片包括嵌入式神经网络处理器和中央处理器;
77、所述嵌入式神经网络处理器,用于获取电梯运动过程中的当前欧拉角以及在所述当前欧拉角下采集的实际加速度数据,基于所述实际加速度数据进行特征提取,得到加速度特征数据;将所述加速度特征数据与所述当前欧拉角进行拼接,得到加速度欧拉角拼接数据;根据所述加速度欧拉角拼接数据进行零漂校正参数预测,得到预测零漂校正参数;
78、所述中央处理器,用于根据所述预测零漂校正参数和所述实际加速度数据对所述电梯的运动状态进行检测,得到所述电梯的运动状态。
79、本说明书实施方式提供一种设备运动状态检测系统,所述检测系统包括异构芯片和重力加速度传感器;所述异构芯片包括嵌入式神经网络处理器和中央处理器;
80、所述重力加速度传感器,用于采集电梯运动过程中的当前欧拉角以及在所述当前欧拉角下采集的实际加速度数据;
81、所述嵌入式神经网络处理器,用于基于所述实际加速度数据进行特征提取,得到加速度特征数据;将所述加速度特征数据与所述当前欧拉角进行拼接,得到加速度欧拉角拼接数据;根据所述加速度欧拉角拼接数据进行零漂校正参数预测,得到预测零漂校正参数;
82、所述中央处理器,用于根据所述预测零漂校正参数和所述实际加速度数据对所述电梯的运动状态进行检测,得到所述电梯的运动状态。
83、在其中一个实施方式,所述检测系统还包括视频采集模块和视频分析模块;
84、所述视频采集模块,用于对所述电梯内部进行拍摄,得到电梯内部图像;
85、所述视频分析模块,用于对所述电梯内部图像进行分割处理,得到位于所述电梯内部的目标对象;若所述目标对象的类别满足预设提醒条件,触发所述目标对象对应的提醒信息的发送。
86、本说明书实施方式提供一种异构芯片,包括嵌入式神经网络处理器npu、中央处理器cpu、存储器以及存储在所述存储器中且被配置为由所述中央处理器cpu和所述嵌入式神经网络处理器npu执行的计算机程序,所述中央处理器cpu和所述嵌入式神经网络处理器npu执行所述计算机程序时实现如上述任一项实施方式所述的方法。
87、本说明书实施方式提供一种设备运动状态检测装置,所述装置包括:
88、电梯运动数据获取模块,用于获取电梯运动过程中的当前欧拉角以及在所述当前欧拉角下采集的实际加速度数据;
89、特征数据确定模块,用于基于所述实际加速度数据进行特征提取,得到加速度特征数据;
90、拼接数据确定模块,用于将所述加速度特征数据与所述当前欧拉角进行拼接,得到加速度欧拉角拼接数据;
91、零漂校正参数确定模块,用于根据所述加速度欧拉角拼接数据进行零漂校正参数预测,得到预测零漂校正参数;
92、电梯运动状态确定模块,用于根据所述预测零漂校正参数和所述实际加速度数据对所述电梯的运动状态进行检测,得到所述电梯的运动状态。
93、在其中一个实施方式,所述电梯运动状态确定模块,还用于利用所述预测零漂校正参数对所述实际加速度数据进行零漂校正,得到校正后加速度数据;基于所述校正后加速度数据对所述电梯的运动过程进行异常检测,得到所述电梯的运动状态。
94、在其中一个实施方式,所述电梯运动状态确定模块,还用于对所述校正后加速度数据进行平滑处理,得到平滑后加速度数据;基于所述平滑后加速度数据对所述电梯的运动过程进行异常检测,得到所述电梯的运动状态。
95、在其中一个实施方式,所述电梯运动状态确定模块,还用于基于所述平滑后加速度数据确定所述电梯在运动方向上的运动速度;根据所述电梯在运动方向上的运动速度判断所述电梯是否超速和/所述电梯是否急停,得到所述电梯的运动状态。
96、在其中一个实施方式,所述电梯运动状态确定模块,还用于基于所述平滑后加速度数据确定所述电梯在与运动方向垂直的平面上的分量加速度;根据所述分量加速度判断所述电梯是否抖动,得到所述电梯的运动状态。
97、本说明书实施方式提供一种零漂校正参数预测装置,所述装置包括:
98、运动数据获取模块,用于获取目标对象在运动过程中的当前欧拉角以及在所述当前欧拉角下采集的实际加速度数据;
99、特征数据提取模块,用于基于所述实际加速度数据进行特征提取,得到加速度特征数据;
100、欧拉角拼接模块,用于将所述加速度特征数据与所述当前欧拉角进行拼接,得到加速度欧拉角拼接数据;
101、校正参数预测模块,用于根据所述加速度欧拉角拼接数据进行零漂校正参数预测,得到预测零漂校正参数。
102、在其中一个实施方式,所述预测零漂校正参数是通过目标零漂校正模型进行预测得到的,所述目标零漂校正模型包括卷积批归一化激活模块;所述特征数据提取模块,还用于将所述实际加速度数据输入至所述卷积批归一化激活模块中依次进行卷积处理、批归一化和激活处理,得到所述加速度特征数据。
103、在其中一个实施方式,所述目标零漂校正模型还包括展开模块和全连接批归一化激活模块;所述校正参数预测模块,还用于将所述加速度欧拉角拼接数据输入至所述展开模块,得到加速度欧拉角展开数据;将所述加速度欧拉角展开数据输入至全连接批归一化激活模块中依次进行全连接处理、批归一化和激活处理,得到所述预测零漂校正参数。
104、在其中一个实施方式,所述预测零漂校正参数是通过目标零漂校正模型进行预测得到的,通过以下方式得到所述目标零漂校正模型:
105、搭建初始零漂校正模型;
106、获取重力加速度传感器的测量零漂校正参数;
107、将所述重力加速度传感器进行随机转动,得到对应的样本欧拉角;
108、基于随机转动后的重力加速度传感器进行数据采集,得到样本加速度数据;
109、以所述测量零漂校正参数为标签,基于所述样本欧拉角以及所述样本加速度数据对所述初始零漂校正模型进行训练,得到所述目标零漂校正模型。
110、本说明书实施方式提供一种电子设备,所述电子设备包括:存储器,以及与所述存储器通信连接的一个或多个处理器;所述存储器中存储有可被所述一个或多个处理器执行的指令,所述指令被所述一个或多个处理器执行,以使所述一个或多个处理器实现上述任一项实施方式所述的方法的步骤。
111、本说明书实施方式提供计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述任一项实施方式所述的方法的步骤。
112、本说明书实施方式提供一种计算机程序产品,所述计算机程序产品中包括指令,所述指令被计算机设备的处理器执行时,使得所述计算机设备能够执行上述任一项实施方式所述的方法的步骤。
113、上述说明书实施方式中,首先,获取电梯运动过程中的当前欧拉角以及在当前欧拉角下采集的实际加速度数据。然后,基于实际加速度数据进行特征提取,得到加速度特征数据。接着,将加速度特征数据与当前欧拉角进行拼接,得到加速度欧拉角拼接数据。其次,根据加速度欧拉角拼接数据进行零漂校正参数预测,得到预测零漂校正参数。最后,根据预测零漂校正参数和实际加速度数据对电梯的运动状态进行检测,得到电梯的运动状态。通过将加速度特征数据与当前欧拉角进行拼接,可以提高预测零漂校正参数的精确度。通过预测零漂校正参数对电梯的实际加速度数据进行校正,可以提高电梯系统对电梯运动状态检测的精确性。
- 还没有人留言评论。精彩留言会获得点赞!