视觉建图方法和自动工作系统与流程
本发明属于智能控制,具体涉及一种视觉建图方法和自动工作系统。
背景技术:
1、现有的户外自移动设备,如自动割草机,需要预先建立工作区域的地图,以便后续基于地图进行规划导航。
2、传统技术中,使用边界线围绕工作区域的外边界铺设一圈,边界线中通以边界电流,自动割草机上设置识别边界电流产生的磁场的边界传感器,通过边界传感器识别工作区域内和外,以防止自动割草机行驶到工作区域之外。在初始建图阶段,自动割草机沿着边界线行走一圈,记录行走过程中的位置坐标,基于记录的位置坐标建立工作区域的地图。这种工作区域限定方式,需要铺设边界线缆,铺设麻烦,建立地图时自动割草机需要沿着边界线行走一圈,步骤耗时且不够智能。
3、还有一种自动割草机的建立工作区域地图的方法,无需布置边界线,通过操作者遥控使自动割草机围绕工作区域的外边界行走一圈,以自动割草机行走过程中记录的边界坐标建立工作区域的地图。这种建图方式虽然省了布设边界线的麻烦,但需要操作者控制自动割草机一起围绕工作区域行走一圈,耗费人力,建图精度依赖操作者的控制精度,建图质量可能无法保障,影响后续的导航控制精度。
4、因此,有必要对现有技术予以改良以克服现有技术中的所述缺陷。
技术实现思路
1、因此,本发明所要解决的是现有技术中建图麻烦、建图质量不稳定的技术问题。
2、为解决上述技术问题,本发明提供一种视觉建图方法,用于建立户外自移动设备工作区域的地图,所述工作区域内或边界上设置有充电站,其特征在于,包括:
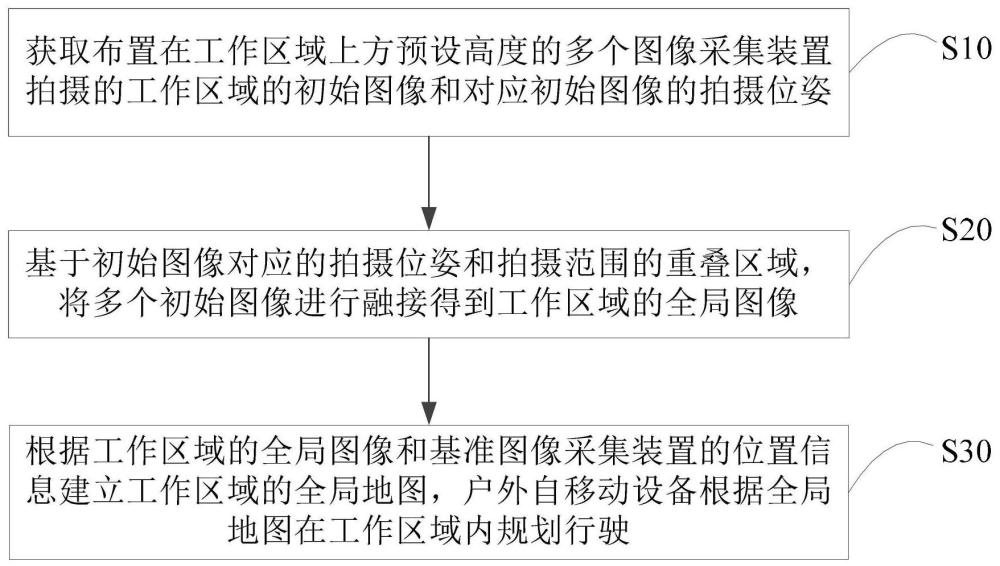
3、获取布置在工作区域上方的多个图像采集装置拍摄的所述工作区域的初始图像和对应所述初始图像的拍摄位姿;其中,一个所述图像采集装置作为基准图像采集装置,所述基准图像采集装置相对所述充电站的位置信息已知,相邻的所述图像采集装置的拍摄范围至少部分重叠,多个所述图像采集装置拍摄的初始图像覆盖整个所述工作区域;
4、基于所述初始图像对应的拍摄位姿和拍摄范围的重叠区域,将多个所述初始图像进行融接得到工作区域的全局图像;
5、根据所述工作区域的全局图像和所述基准图像采集装置相对所述充电站的位置信息建立所述工作区域的全局地图,所述户外自移动设备根据所述全局地图在所述工作区域内规划行驶。
6、在其中一实施例中,所述根据所述工作区域的全局图像和所述基准图像采集装置相对所述充电站的位置信息建立所述工作区域的全局地图,包括:
7、根据所述基准图像采集装置相对所述充电站的位置信息确定所述基准图像采集装置采集的初始图像中各个像素点相对所述充电站的位置坐标,进而确定所述全局图像中所有像素点的位置坐标;
8、提取所述全局图像的边缘区域像素点集,识别所述边缘区域像素点集中满足预设梯度条件的边界像素点集,根据所述边界像素点集构建所述工作区域的边界像素点序列;
9、基于所述边界像素点序列构建所述工作区域的外边界。
10、在其中一实施例中,所述将多个所述初始图像进行融接得到工作区域的全局图像,包括:
11、根据每个所述图像采集装置的拍摄位姿将对应拍摄的所述初始图像进行栅格化处理,得到对应每个所述初始图像的初始栅格图像;其中,所述初始栅格图像中每个栅格所表示的工作区域的实际大小相同;
12、将所述初始栅格图像进行平行投影运算,得到目标栅格图像;其中,所述目标栅格图像中每个栅格均是显示尺寸相同的正方形;
13、利用栅格地图图像特征匹配算法,将多个所述目标栅格图像按顺序依次融接得到所述全局图像。
14、在其中一实施例中,所述将所述初始栅格图像进行平行投影运算,包括:
15、对每个所述区域栅格图像进行同一显示比例的缩放处理,计算每个栅格的顶点坐标,将每个栅格的顶点坐标平行投影到平面栅格画布上;
16、将所述初始栅格图像中的所有像素栅格对应映射到所述平面栅格画布中,以得到所述目标栅格图像。
17、在其中一实施例中,所述充电站位于所述基准图像采集装置的拍摄范围内,所述将所述目标栅格图像按顺序依次融接得到所述全局图像,包括:
18、将所述基准图像采集装置对应的所述目标栅格图像作为基准融接图像,确定与所述基准融接图像具有重叠范围的目标栅格图像作为第一次序目标融接图像,确定与所述第一次序目标融接图像具有重叠范围的目标栅格图像为第二次序目标融接图像,依次类推,确定所有所述目标栅格图像的融接次序;
19、将所述第一次序目标融接图像与所述基准融接图像进行融接,得到中间融接图像,将所述第二次序目标融接图像与所述中间融接图像融接,直到完成所有目标栅格图像的融接,得到所述全局图像。
20、在其中一实施例中,所述将所述目标栅格图像按顺序依次融接得到所述全局图像,包括:
21、识别待融接的两所述目标栅格图像的重叠区域;
22、根据所述重叠区域确定待融接的目标栅格图像的旋转平移矩阵;
23、根据所述旋转平移矩阵进行图像融接。
24、此外,本发明还提供一种自动工作系统,包括:
25、户外自移动设备,用于在工作区域内自动执行工作任务;
26、充电站,设置在工作区域或工作区域的边界上,用于为所述户外自移动设备充电;
27、图像采集装置,数量为多个,布置在工作区域上方,用于拍摄工作区域的图像;其中,一个所述图像采集装置作为基准图像采集装置,所述基准图像采集装置相对所述充电站的位置信息已知,相邻的所述图像采集装置的拍摄范围至少部分重叠,多个所述图像采集装置拍摄的初始图像覆盖整个所述工作区域;
28、计算器,与所述图像采集装置通信连接,设置于所述户外自移动设备或者与所述户外自移动设备无线连接,用于:
29、获取多个所述图像采集装置拍摄的所述工作区域的初始图像和对应所述初始图像的拍摄位姿;
30、基于所述初始图像对应的拍摄位姿和拍摄范围的重叠区域,将多个所述初始图像进行融接得到工作区域的全局图像;
31、根据所述工作区域的全局图像和所述基准图像采集装置的所述位置信息建立所述工作区域的全局地图,所述户外自移动设备根据所述全局地图在所述工作区域内规划行驶。
32、在其中一实施例中,多个所述图像采集装置的拍摄角度为俯视拍摄,每个所述图像采集装置获取的所述工作区域的初始图像为部分所述工作区域的俯视平面图;所述基准图像采集装置设置在所述充电站的正上方。
33、在其中一实施例中,所述计算器还用于:识别所述初始图像中满足预设配准条件的像素点集,根据满足所述预设配准条件的像素点集确定户外自移动设备的基准位置;
34、所述户外自移动设备接收所述基准位置,基于所述基准位置在所述工作区域内导航行驶。
35、在其中一实施例中,所述户外自移动设备自充电站出发执行作业任务,基于第一定位导航系统确定当前坐标位置;
36、所述计算器还用于:
37、在满足重定位条件的情况下,获取所述户外自移动设备自身的摄像装置拍摄的环境图像;
38、将所述环境图像与所述全局地图进行特征匹配,确定所述户外自移动设备当前所处的基准位置;
39、根据所述基准位置校准所述当前坐标位置。
40、在其中一实施例中,所述户外自移动设备自充电站出发执行作业任务,基于第一定位导航系统确定当前坐标位置;
41、所述计算器还用于:
42、在满足重定位条件的情况下,获取所述图像采集装置拍摄的初始图像;
43、识别所述初始图像中满足预设配准条件的像素点集,根据满足所述预设配准条件的像素点集确定户外自移动设备的基准位置;
44、根据所述户外自移动设备的基准位置校准所述当前坐标位置。
45、本发明提供的技术方案,具有以下优点:
46、本发明提供的视觉建图方法和自动工作系统,通过图像采集装置获取工作区域的局部初始图像,融接之后形成工作区域的全局图像,根据全局图像建立工作区域的全局地图,无需铺设边界线,也无需户外自移动设备围绕工作区域行走一圈,建图更简单方便;而且,建立的地图为现实工作区域的视觉地图,只要采用高清图像采集装置即可提高建图精度,地图信息更精细全面,便于户外自移动设备的精准导航控制。
- 还没有人留言评论。精彩留言会获得点赞!