基于变焦相机和激光测距的船舶干舷识别方法与流程
本发明涉及基于变焦相机和激光测距的船舶干舷识别方法,属于航道船舶干舷识别。
背景技术:
1、近年来,随着航运业的快速发展和夜间作业需求的增加,夜间船舶识别和定向补光技术变得尤为重要。船舶干舷是船舶上用于测量船舶吃水及载重的标志物,其准确识别对于安全导航、港口管理和海事执法具有关键意义。
2、近年来,船舶检测和识别方向的技术日趋成熟,对船舶干舷识别相关的技术较少。cn201811452126.7提出一种基于深度强化神经网络的内河干舷检测方法,采用激光雷达与云台联动的方式对船舶进行扫描,并通过强化神网络对船舶干舷仅进行检测进而判断船舶是否超载。该方法采用激光雷达作为主要传感器,受限于激光雷达本身的技术极限,仅针对航道宽度小于200米的内河航道能覆盖,对于远距离的船舶无法检测。
技术实现思路
1、本发明所要解决的技术问题是:提供基于变焦相机和激光测距的船舶干舷识别方法,采用激光测距模块代替激光雷达,突破激光雷达识别距离200米的极限,最远识别距离可达到1000米,实现船舶干舷的准确识别。
2、本发明为解决上述技术问题采用以下技术方案:
3、基于变焦相机和激光测距的船舶干舷识别方法,包括如下步骤:
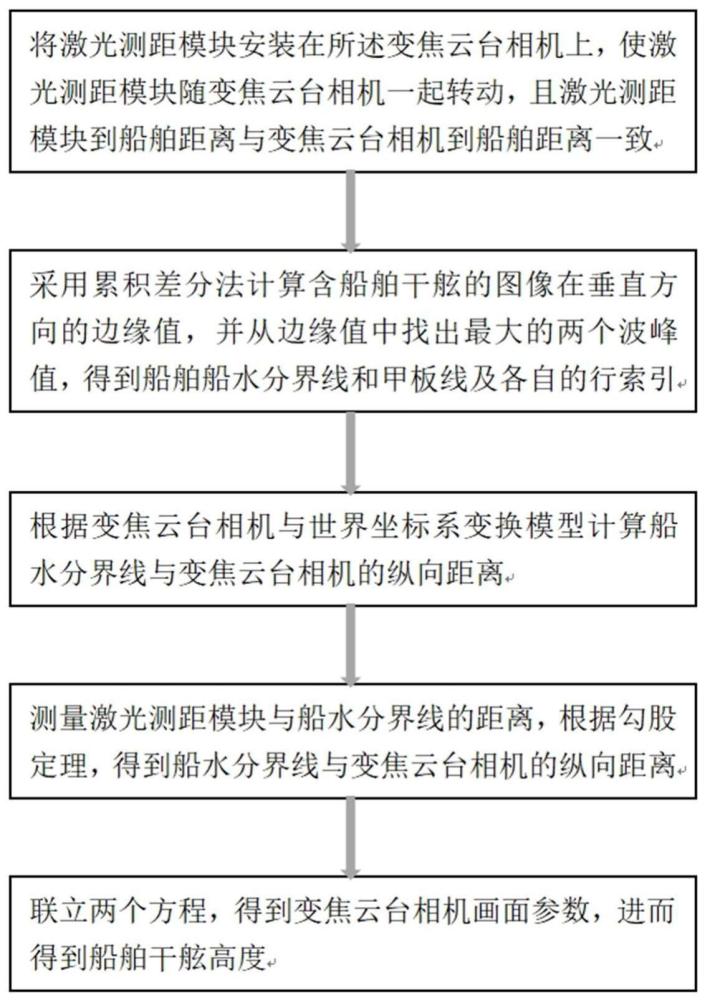
4、步骤1,在航道一侧设置变焦云台相机,用于对航道中的在航船舶干舷进行抓拍;将激光测距模块安装在所述变焦云台相机上,使得所述激光测距模块随变焦云台相机一起转动,且激光测距模块到船舶的距离与变焦云台相机到船舶的距离一致;
5、步骤2,利用变焦云台相机拍摄得到含船舶干舷的图像,采用累积差分法计算含船舶干舷的图像在垂直方向的边缘值,并从所有边缘值中找出最大的两个波峰值,根据最大的两个波峰值得到船舶船水分界线和甲板线以及各自在含船舶干舷的图像中的行索引;
6、步骤3,根据变焦云台相机与世界坐标系变换模型计算船水分界线与变焦云台相机的纵向距离,计算公式如下:
7、
8、其中,y为船水分界线与变焦云台相机的纵向距离,h为激光测距模块和相机的安装高度,fp为相机内参,y1为船水分界线在含船舶干舷的图像中的行索引,yp为变焦云台相机画面参数;
9、步骤4,利用激光测距模块测量得到激光测距模块与船水分界线的距离d,根据激光测距模块的安装高度和勾股定理,得到船水分界线与变焦云台相机的纵向距离,即:
10、
11、步骤5,根据步骤3和步骤4,得到变焦云台相机画面参数的计算公式为:
12、
13、从而得到船舶干舷高度为:
14、
15、其中,yg表示在航船舶干舷高度,y2为甲板线在含船舶干舷的图像中的行索引。
16、作为本发明的一种优选方案,所述步骤2的具体过程如下:
17、1)设定利用变焦云台相机拍摄得到的含船舶干舷的图像的高为h、宽为w,g(i,j)表示图像第i行第j列像素的灰度值,0<g(i,j)<255,对图像各行的灰度值求均值,得到列向量c,即:
18、
19、其中,c(i)表示第i行所有像素灰度值的均值;
20、2)设定船舶船水分界线和甲板线的宽度均为b个像素,对c(i)进行差分,得到diff1(i):
21、diff1(i)=c(i+b)-c(i)i=1,2,…,h-b
22、其中,diff1(i)表示c(i)差分得到的值,c(i+b)表示第i+b行所有像素灰度值的均值;
23、3)计算diff1(i)的累计值:
24、
25、其中,diffacc(i)表示diff1(i)的累计值,diff1(k)表示c(k)差分得到的值,c(k)表示第k行所有像素灰度值的均值;
26、4)再对diffacc(i)进行差分,得到diff2(i):
27、diff2(i)=diffacc(i+b)-diffacc(i)i=1,2,…,h-b
28、其中,diff2(i)表示diffacc(i)差分得到的值,diffacc(i+b)表示diff1(i+b)的累计值,diff1(i+b)表示c(i+b)差分得到的值;
29、5)从所有diff2(i)中找到最大值和次大值,并在含船舶干舷的图像中找到最大值和次大值对应的行索引,将两个行索引中的较小值作为船水分界线的索引值,较大值作为甲板线的索引值。
30、作为本发明的一种优选方案,所述变焦云台相机的型号为ids-2dy9840iax-asp(t5),激光测距模块的型号为lsp-lrs-0510a。
31、一种计算机设备,包括存储器、处理器,以及存储在所述存储器中并能够在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述的基于变焦相机和激光测距的船舶干舷识别方法的步骤。
32、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的基于变焦相机和激光测距的船舶干舷识别方法的步骤。
33、本发明采用以上技术方案与现有技术相比,具有以下技术效果:
34、1、本发明采用激光测距模块代替激光雷达,突破激光雷达识别距离200米的极限,最远识别距离可达到1000米,实现船舶干舷的准确识别。
35、2、本发明方法可精准测量船舶干舷高度,克服了传统方法测量距离近、精度不高的难题,通过本发明方法最远可测量1km的船舶干舷,精度达到±5cm。
技术特征:
1.基于变焦相机和激光测距的船舶干舷识别方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于变焦相机和激光测距的船舶干舷识别方法,其特征在于,所述步骤2的具体过程如下:
3.根据权利要求1所述的基于变焦相机和激光测距的船舶干舷识别方法,其特征在于,所述变焦云台相机的型号为ids-2dy9840iax-asp(t5),激光测距模块的型号为lsp-lrs-0510a。
4.一种计算机设备,包括存储器、处理器,以及存储在所述存储器中并能够在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至3任一项所述的基于变焦相机和激光测距的船舶干舷识别方法的步骤。
5.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至3任一项所述的基于变焦相机和激光测距的船舶干舷识别方法的步骤。
技术总结
本发明公开了基于变焦相机和激光测距的船舶干舷识别方法,包括:将激光测距模块安装在变焦云台相机上,激光测距模块随变焦云台相机一起转动,激光测距模块到船舶距离与变焦云台相机到船舶距离一致;采用累积差分法计算含船舶干舷的图像在垂直方向的边缘值,并从所有边缘值中找出最大的两个波峰值,根据最大的两个波峰值得到船舶船水分界线和甲板线以及各自在含船舶干舷的图像中的行索引;根据变焦云台相机与世界坐标系变换模型计算船水分界线与变焦云台相机的纵向距离;利用激光测距模块测量得到激光测距模块与船水分界线的距离,根据勾股定理,得到船水分界线与变焦云台相机的纵向距离,进而得到变焦云台相机画面参数,从而得到船舶干舷高度。
技术研发人员:杨正,王晓春,王海江,林盛梅,姚夏晓,程思钦,齐太顺,刘志荣,黄峰,孙苏娟,欧阳文全,王硕
受保护的技术使用者:南京畅淼科技有限责任公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!