一种室内外一体化实时组合定位方法与流程
本发明属于智能定位,特别是涉及一种室内外一体化实时组合定位方法。
背景技术:
1、目前,尚没有一种单一的定位技术能够满足人们对全方位服务的要求。虽然在室外开阔区域,全球卫星导航系统(global navigation satellite system,gnss)已经足以提供成熟的定位服务,但是在室外遮挡环境下,单纯依靠gnss技术依然存在诸多的限制和不足。
2、为了解决室外定位技术无法实现精确室内定位的问题,室内定位技术逐渐发展起来,uwb定位技术是用无载波通信技术(ultrawideband)来实现定位,uwb定位技术抗多径能力以及穿透能力强,且在室内能够提供高精度的位置信息。但是室内定位与室外定位相对独立,针对室内外复杂环境,单一的定位解决方案很难同时覆盖室内外空间,不能很好地满足各场景下连续高精度定位的需求。根据实际定位场景的需求结合各种定位技术优势互补的特性,将多种定位技术进行组合是目前常见的高精度定位解决方案。
3、由于室内定位是独立发展起来的,与室外gnss技术存在先天的缝隙,在此情况下实现室外遮挡环境下定位、室内环境下定位、室内外交互区域定位和定位系统之间的切换问题就成为了室内外无缝定位技术研究中的焦点。将gnss技术和uwb定位技术相结合,即可以利用gnss技术实现室外环境下的定位,又可以利用uwb定位技术实现室内环境下的位置服务,同时为了实现定位服务的平滑过渡,还需要解决不同体制的定位系统间的自由切换问题。
技术实现思路
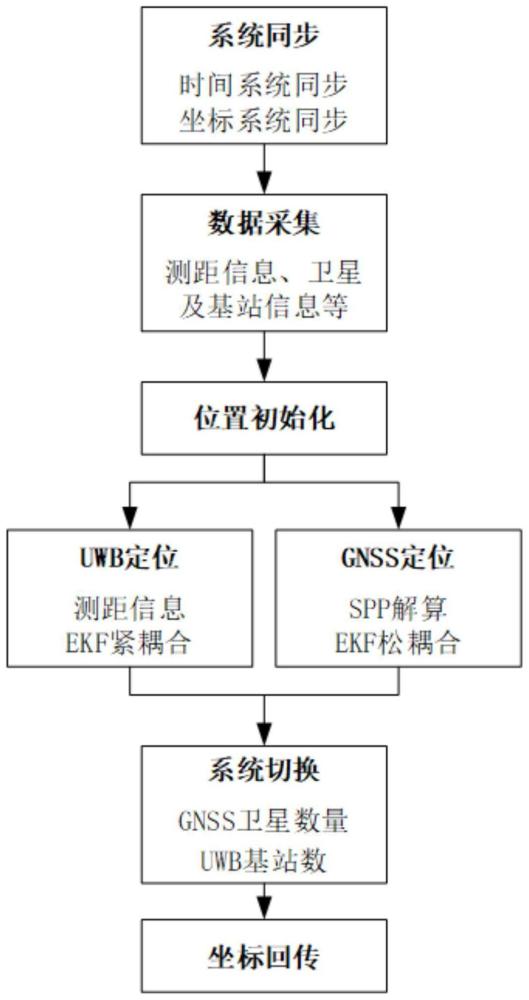
1、本发明针对现有技术的不足,提出了一种室内外一体化实时组合定位方法,本发明使用集成了uwb及gnss定位芯片的可穿戴设备接收测距信息,并将测距信息发往服务器,随后服务器接收并解析接收到的uwb以及gnss测距信息解算两种系统下的实时位置。根据接收到的卫星及uwb基站数量判断所处环境并输出位置信息。本发明考虑了室内外一体化定位方案,并设计了室内外环境定位方案的判断策略,为室内外无缝定位提供解决方案。
2、为实现以上目的,本发明技术方案为:
3、一种室内外一体化实时组合定位方法,包括以下步骤:
4、s1:系统同步,所述的系统同步包括可穿戴设备uwb时间系统与gnss时间系统同步,以及可穿戴设备uwb坐标系统与gnss坐标系统统一;
5、s2:被监测目标初始位置确定,所述s2步骤具体包括:
6、s21:被监测目标所处室内或室外环境判断
7、设置可穿戴设备gnss定位系统与uwb定位系统的切换阈值;
8、可穿戴设备包括的gnss定位模块搜索可接收到卫星信号的卫星数量,当所述gnss定位模块搜索可接收到卫星信号的卫星数量小于所述阈值时,被监测目标处于室内,可穿戴设备采用uwb定位系统;
9、当所述gnss定位模块搜索可接收到卫星信号的卫星数量大于或等于所述阈值时,被监测目标处于室外,可穿戴设备采用gnss定位系统;
10、s22:可穿戴设备采集距离数据并发往服务器;
11、当可穿戴设备采用uwb定位系统时,可穿戴设备包括的uwb定位系统采集被监测目标与uwb多个基站之间的距离数据,可穿戴设备包括的传输模块将被监测目标与每个uwb基站之间的距离数据发往服务器;
12、当穿戴设备采用gnss定位系统时,可穿戴设备包括的gnss定位系统采集被监测目标与多个卫星之间的距离数据,可穿戴设备包括的传输模块将被监测目标与每个卫星之间的距离数据发往服务器;
13、s23:服务器基于收到的距离数据解算被监测目标的初始位置;
14、当服务器收到被监测目标与uwb基站之间的距离数据时,服务器依据被监测目标与多个uwb基站之间的距离数据计算被监测目标与uwb每个基站之间的距离值,服务器依据被监测目标与每个uwb基站之间的距离值确定被监测目标初始位置在三维坐标系统中的坐标值;
15、当服务器收到被监测目标与卫星之间的距离数据时,服务器依据被监测目标与多个卫星之间的距离数据计算被监测目标与每个卫星之间的距离值,服务器依据被监测目标与每个卫星之间的距离值确定被监测目标初始位置在三维坐标系统中的坐标值;
16、s3:被监测目标当前时刻实时位置确定,所述s3步骤具体包括:
17、s31:被监测目标当前时刻所处室内或室外环境判断
18、可穿戴设备包括的gnss定位模块搜索可接收到卫星信号的卫星数量,当所述gnss定位模块搜索可接收到卫星信号的卫星数量小于预先设置的阈值时,被监测目标处于室内,可穿戴设备采用uwb定位系统;
19、当所述gnss定位模块搜索可接收到卫星信号的卫星数量大于或等于预先设置的阈值时,被监测目标处于室外,可穿戴设备采用gnss定位系统;
20、s32:可穿戴设备采集当前时刻的距离数据并发往服务器;
21、当可穿戴设备采用uwb定位系统时,可穿戴设备包括的uwb定位系统采集被监测目标与uwb基站之间的距离数据,可穿戴设备包括的传输模块将被监测目标与uwb基站之间的距离数据发往服务器;
22、当穿戴设备采用gnss定位系统时,可穿戴设备包括的gnss定位系统采集被监测目标与卫星之间的距离数据,可穿戴设备包括的传输模块将被监测目标与卫星之间的距离数据发往服务器;
23、当可穿戴设备采用uwb定位系统时,可穿戴设备包括的uwb定位系统采集被监测目标与uwb基站之间的距离数据并发往服务器;
24、当穿戴设备采用gnss定位系统时,可穿戴设备包括的gnss定位系统采集被监测目标与卫星之间的距离数据并发往服务器;
25、s33:服务器基于收到的距离数据以及上一时刻的位置解算被监测目标的当前时刻的实时位置;
26、当服务器收到被监测目标与多个uwb基站之间的距离数据时,服务器根据被监测目标与多个uwb基站之间的距离数据以及上一时刻的位置解算被监测目标的当前时刻实时位置状态向量xk如公式(7)所示:
27、
28、其中表示采用uwb定位模块时被监测目标当前时刻预测的状态向量,通过被监测目标当前时刻与多个uwb基站之间的距离数据以及上一时刻的位置预测得到;
29、kk表示卡尔曼滤波的增益矩阵;
30、是被监测目标与uwb基站之间当前时刻的预测距离通过当前时刻预测的状态向量与基站坐标值计算得到;
31、rk是被监测目标与uwb基站之间当前时刻的实际距离,通过当前时刻收到的距离数据计算得到;
32、被监测目标当前时刻的状态向量xk包括了被监测目标当前的坐标值,计算得到被监测目标当前时刻的状态向量xk则得到被监测目标当前所处位置;
33、当服务器收到被监测目标与多个uwb基站之间的距离数据时,服务器根据被监测目标与多个卫星之间的距离数据解算被监测目标的实时位置状态向量如公式(11)所示:
34、
35、xgi是采用gnss定位模块时被监测目标当前时刻的状态向量;
36、状态转移矩阵是服务器端依据当前时刻预测的状态向量与上一时刻的状态向量计算得到;
37、xgi-1为初始位置或上一时刻的位置状态向量;
38、ki表示卡尔曼滤波增益矩阵;
39、z(i)为gnss-rtk载波相位差分析双差后的高精度距离数据;
40、hi为系数矩阵,用来表示卡尔曼滤波观测量和状态向量之间的转换关系,通过卡尔曼滤波推导方法。
41、进一步的是,所述步骤s33中,被监测目标当前时刻预测的状态向量的计算方法是:
42、
43、其中,表示被监测目标当前时刻预测的状态向量,包括了被监测目标在itrf坐标框架下预测的坐标值,系统矩阵ak可由匀速假设导出,ak如公式(4):
44、
45、xk-1是被监测目标上一时刻的状态向量,由于恒速运动的原因,控制输入uk-1和输入增益bk-1均为零,表示当前时刻预测误差的协方差矩阵,pk-1是上一时刻的协方差矩阵,过程噪声qk-1可由预先设置的加速度为高斯分布n(0,σa)的假设导出;t为矩阵转置,t是每次卡尔曼滤波迭代之间的时间间隔。
46、进一步的是,所述步骤s33中,当服务器根据被监测目标与多个uwb基站之间的距离数据解算被监测目标的当前时刻实时位置状态时,卡尔曼滤波的增益矩阵kk计算方式如公式(8)及公式(9)所示,
47、
48、
49、表示当前时刻预测误差的协方差矩阵,hk为系数矩阵,用来表示卡尔曼滤波观测量和状态向量之间的转换关系,通过卡尔曼滤波推导方法,t为矩阵转置,rk为测量噪声协方差,如公式(10)所示,pk表示当前时刻状态协方差矩阵的更新,i为单位矩阵。
50、进一步的是,所述步骤s33中,当服务器根据被监测目标与多个卫星之间的距离数据解算被监测目标的当前时刻实时位置状态时,卡尔曼滤波的增益矩阵ki由以下公式(12)、公式(13)及(14)计算得到:其中,
51、
52、
53、dω(i)=(i-kihi)dx(i,i-1) (14)
54、其中,dx(i,i-1)表示当前时刻预测误差的协方差矩阵;
55、状态转移矩阵,是服务器端依据上一时刻的位置信息以及收到的所述距离数据;通过多普勒测速算法计算得到被监测目标的速度及加速度信息,服务器通过所述速度及加速度信息通过现有方法构建出状态转移矩阵
56、dx(i-1)是上一时刻的协方差矩阵;
57、hi为系数矩阵,用来表示来表示卡尔曼滤波观测量和状态向量之间的转换关系,通过卡尔曼滤波推导方法;
58、dδ(i)观测值协方差矩阵,当前时刻卡尔曼滤波的观测量与上一时刻的观测量计算得到。
59、本发明的有益效果是:
60、1.本发明结合gnss及uwb定位技术,针对室内外环境下的不同定位环境,对定位场景进行了区分,发明了一种室内外一体化实时组合定位方法,能够实现对人员在室内外场景切换时的连续定位,对比单一定位系统,应用范围更加广泛。
61、2.本发明针对室内外场景的衔接区域,设计实现了系统的无缝切换方案,对gnss及uwb定位模式设定判断阈值,针对衔接区域选择从两种定位结果中选择更合适的进行回传,保证位置信息的连续性。
62、3.本发明对于室内外场景下的两种定位方案,使用恒速运动模型与定位系统的位置信息进行融合,更符合穿戴设备的实际使用场景,有助于提高定位精度,平滑人员定位轨迹。
63、4.本发明使用服务器在后台对采集到的数据进行位置解算并回传,有助于降低可穿戴设备硬件成本,提升组合定位服务的稳定性,服务器后台对人员位置信息进行分发,能够达到对施工人员和设备所处空间位置、状态等进行有效的管理。
- 还没有人留言评论。精彩留言会获得点赞!