一种联合时延和多普勒频移的运动传感器主动定位方法
本发明涉及传感器网络目标定位,具体涉及一种联合时延和多普勒频移的运动传感器主动定位方法。
背景技术:
1、主动定位系统比被动定位具有更大的灵活性和鲁棒性,近年来受到了广泛的关注。发射机发射探测信号,经过一段时间的传播后,经目标反射重新被接收机接收。在不同的情况下,得到了几种测量方法。利用发射信号和接收信号的互相关技术,可以很容易地获得时延测量。此外,如果目标和传感器之间存在相对运动,则可以估计出多普勒测量。
2、当信号传播期间传感器发生运动时,即:传感器发射信号的位置与传感器接收信号的位置不同时,如何实现对目标的位置估计,是一个值得研究的问题。现有的文献,往往忽略了传感器的运动效应以简化定位方法,当信号以光速传播时,在主动定位中这种运动效应是可以忽略的,但在以1500m/s左右(远小于光速)的声速传播的声纳定位系统中,如果忽略传感器运动,定位性能将大大下降。
3、针对上述问题,人们提出了大量的定位方法来从非线性测量中估计位置,如最大似然估计(mle)、最小二乘(ls)方法和半定松弛(sdr)方法。然而,现有的技术并没有考虑到传感器的运动效应。扩展卡尔曼滤波器(ekf)用于auv定位,以补偿在询问-接收周期期间的auv运动。由于ekf是一个递归的自修正估计器,因此它需要在不同的时间进行一系列的测量,并且在收敛到一个好的结果之前会出现一个有限的过渡周期。
4、因此亟需一种联合时延和多普勒频移的运动传感器主动定位方法。
技术实现思路
1、为了解决上述现有技术的不足,本发明提供了一种联合时延和多普勒频移的运动传感器主动定位方法。考虑到定位过程中的传感器运动效应,从即时测量中构造目标位置的精确解,相比两步封闭形式的解决方案,本方法需要更少的传感器,具有更好的鲁棒性。
2、本发明的目的可以通过采取如下技术方案达到:
3、本发明提供一种联合时延和多普勒频移的运动传感器主动定位方法,包括:
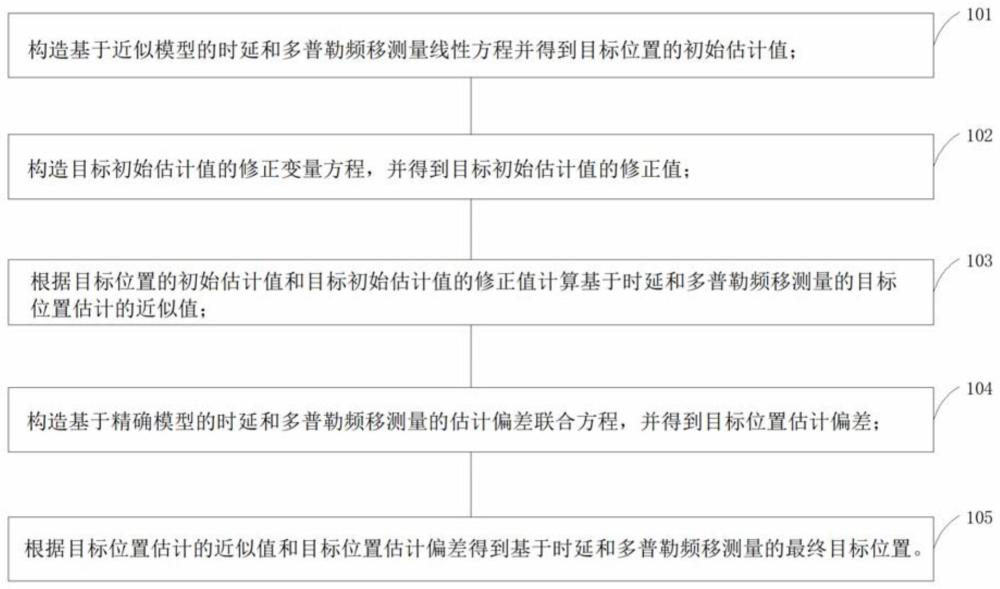
4、构造基于近似模型的时延和多普勒频移测量线性方程并得到目标位置的初始估计值;
5、构造目标初始估计值的修正变量方程,并得到目标初始估计值的修正值;
6、根据目标位置的初始估计值和目标初始估计值的修正值计算基于时延和多普勒频移测量的目标位置估计的近似值;
7、构造基于精确模型的时延和多普勒频移测量的估计偏差联合方程,并得到目标位置估计偏差;
8、根据目标位置估计的近似值和目标位置估计偏差得到基于时延和多普勒频移测量的最终目标位置。
9、作为本发明的进一步的技术方案为,所述构造基于近似模型的时延和多普勒频移测量线性方程并得到目标位置的初始估计值;具体包括:
10、构造基于近似模型的时延测量方程;
11、构造基于近似模型的多普勒频移测量方程;
12、构造基于近似模型的时延和多普勒频移测量线性方程;
13、求解时延和多普勒频移测量线性方程的加权最小二乘解,得到目标位置的初始估计值。
14、进一步的,所述构造基于近似模型的时延测量方程;具体为:
15、根据式(1)构造基于近似模型的时延测量方程:
16、b1,τδτ=h1,τ-a1,τθo (1)
17、已知传感器发射位置为ti∈rk(i=1,2,…,n),信号传播速度为c,τi为第i个传感器的时延测量值,δτi为零均值高斯随机噪声,时延测量模型可表示为:τi=τio+δτi;
18、式中:τi为第i个传感器的时延测量值,表示来自传感器i的探针信号的理想传输时间,δτi为零均值高斯随机噪声;时延测量向量可表示为:τ=[τ1,τ2,…,τn]t=τo+δτ,其中τo表示无噪声时延向量,δτ为时延测量噪声向量,其协方差矩阵为qτ;θo=[uot,γo]t,γo=uotuo,uo∈rk(k=2或k=3是定位空间的维数)为目标位置;则式(1)中的各变量为:
19、
20、式中:“t”表示转置。
21、所述构造基于近似模型的多普勒频移测量方程;具体为:
22、根据式(2)构造基于近似模型的多普勒频移测量方程:
23、b1,fδm=h1,f-a1,fθo (2)
24、假设每个传感器在询问期间都以匀速vi∈rk进行运动,因此第i个传感器将在位置si∈rk上检测到反射信号。已知第i个传感器的工作频率为fic,fi为第i个传感器的多普勒频移测量值,则多普勒频移测量模型可表示为:式中:fio表示无噪声真实值,δfi表示零均值高斯随机噪声,表示时延率。所有n个传感器的多普勒测量向量定义为:f=[f1,f2,…,fn]t=fo+δf,其中fo为无噪声多普勒频移向量,δf为多普勒频移测量噪声向量,其协方差矩阵为qf。
25、则式(2)中各变量为:
26、
27、δm=[δτt,δft]t为总噪声向量矩阵,其协方差矩阵为:
28、
29、所述构造基于近似模型的时延和多普勒频移测量线性方程;具体为:
30、联合式(1)、(2),根据式(3)构造基于近似模型的时延和多普勒频移测量线性方程;
31、b1δm=h1-a1θo (3)
32、式中:
33、
34、所述求解时延和多普勒频移测量线性方程的加权最小二乘解,得到目标位置的初始估计值,具体为:
35、求解式(3)的加权最小二乘解,根据式(4)可得目标位置的初始估计值u1;
36、
37、式中:θ1是式(3)中θo的解,其中包含了目标初始位置的估计值u1,为加权矩阵。
38、作为本发明的进一步的技术方案为,所述构造目标初始估计值的修正变量方程,并得到目标初始估计值的修正值;具体包括:
39、根据式(5)构造目标初始估计值的修正变量方程,对基于近似模型的目标位置初始估计进行修正;
40、
41、式中:表示对θ1的修正量,表示对u1的修正量;
42、求解式(5)的最小加权二乘解,得到目标初始估计值的修正值δu1;
43、
44、式中:为加权矩阵,其中“cov”表示协方差;δu1是的解。
45、作为本发明的进一步的技术方案为,所述根据目标位置的初始估计值和目标初始估计值的修正值计算基于时延和多普勒频移测量的目标位置估计的近似值;具体包括:
46、联合式(4)、(6),根据式(7)得到基于时延和多普勒频移测量的目标位置估计的近似值ua;
47、ua=u1-δu1 。 (7)
48、作为本发明的进一步的技术方案为,所述构造基于精确模型的时延和多普勒频移测量的估计偏差联合方程,并得到目标位置估计偏差;具体包括;
49、基于精确模型,根据式(8)构造基于时延测量的目标位置估计偏差方程:
50、b3,τδτ=h3,τ-a3,τδu (8)
51、式中:a3,τ的第i行为表示向量ua-ti的单位向量;h3,τ的第i个元素为h3,τ(i)=(||vi||2-c2)τi+2c||ua-ti||-2vit(ua-ti);b3,τ为对角阵,其第i个元素为b3,τ(i,i)=||vi||2-c2;δu=uo-ua表示从近似模型得到的目标位置估计偏差;
52、基于精确模型,根据式(9)构造基于多普勒频移的目标位置估计偏差方程:
53、b3,fδf=h3,f-a3,fδu (9)
54、式中:a3,f的第i行为h3,f的第i个元素为对角阵b3,f的第i个对角元素为||vi||2-c2;
55、联合式(8)、(9),根据式(10)构造基于精确模型的时延和多普勒频移测量的估计偏差联合方程:
56、b3δm=h3-a3δu (10)
57、式中:
58、
59、根据式(11)求式(10)的加权最小二乘解,得到基于时延和多普勒频移测量的目标位置估计偏差δuτ,f:
60、
61、式中:是加权矩阵,δuτ,f是式(10)目标位置估计偏差δu的解。
62、作为本发明的进一步的技术方案为,根据目标位置估计的近似值和目标位置估计偏差得到基于时延和多普勒频移测量的最终目标位置;具体包括:
63、联合式(7)、(11),根据式(12)得到基于时延和多普勒频移测量的最终目标位置:
64、u=ua+δuτ,f。 (12)
65、作为本发明的进一步的技术方案为,还包括:根据mse对最终目标位置进行检验;
66、mse=ε(||u-uo||2) (13)
67、式中:u表示基于时延和多普勒频移测量的最终目标位置。
68、进一步的,所述mse是使用2000次蒙特卡罗运行获得的,信号的传播速度为1500m/s,协方差矩阵是和其中是时延协方差,是多普勒频移协方差,被用于仿真设置,的值也被设为
69、本发明相对于现有技术具有如下的有益效果:
70、本发明利用时延结合运动传感器获得的多普勒频移测量值实现了对静止目标的主动定位;该定位方法在模型上,考虑到了传感器运动问题对目标定位性能的影响,构建了一个联合时间延迟和多普勒频移测量的模型,该模型可以解释观测期间传感器的运动。
71、在具体目标估计时,首先忽略传感器运动,导出闭式解,给出目标位置的近似估计;在此基础上,利用所提出的精确模型改进近似解,补偿传感器运动效应。仿真结果表明所提出的模型和解决方案的优越性。相比现有方法,本方法需要更少的传感器,具有更好的鲁棒性,可以广泛应用于传感器网络目标定位相关领域。
- 还没有人留言评论。精彩留言会获得点赞!