一种专用设备的动平衡控制方法、装置及系统与流程
本发明涉及智能控制,具体涉及一种专用设备的动平衡控制方法、装置及系统。
背景技术:
1、传统的动平衡机主要用于旋转机械在制造阶段,消除旋转机械在加工和装配过程中造成的原始不平衡。传统的动平衡机以卧式动平衡机为主,支承采用大刚度的硬支承。此类动平衡机应用于专用设备动平衡时,由于转子放置方式、支承结构和驱动方式均与专用设备转子的工作情况存在较大区别,其动平衡结果误差较大,无法有效抵消旋转机械在加工和装配过程中造成的原始不平衡以及降低工作时的振动。
技术实现思路
1、本发明要解决的技术问题是提供一种专用设备的动平衡控制方法、装置及系统,解决现有技术中动平衡结果误差大,无法抵消旋转机械在加工和装配过程中原始不平衡和精确性低的问题。
2、为解决上述技术问题,本发明的技术方案如下:
3、一种专用设备的动平衡控制方法,包括:
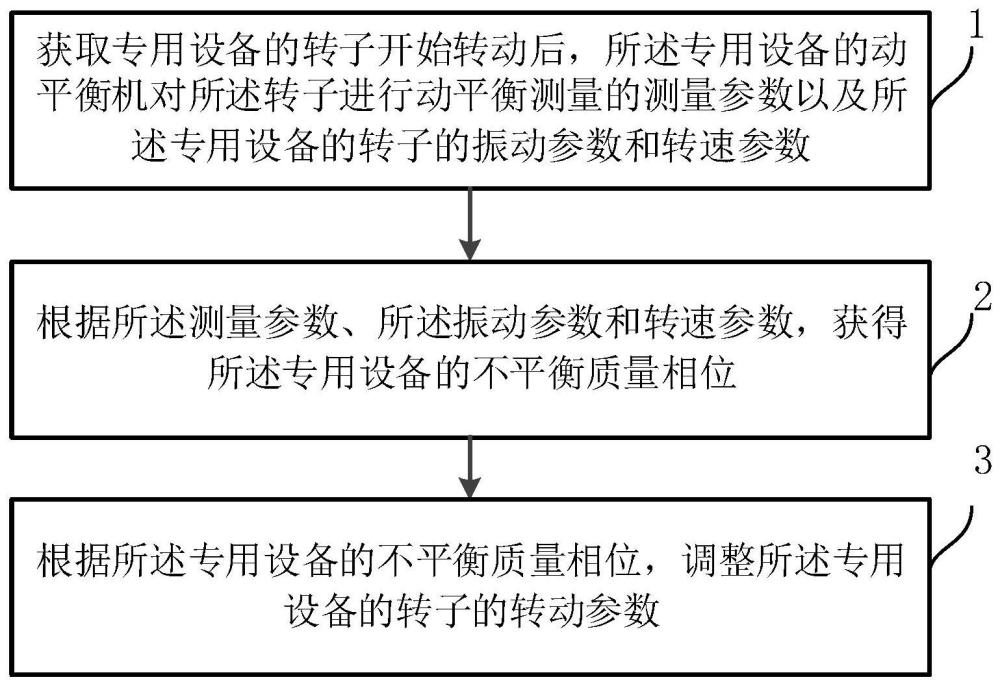
4、获取专用设备的转子开始转动后,所述专用设备的动平衡机对所述转子进行动平衡测量的测量参数以及所述专用设备的转子的振动参数和转速参数;
5、根据所述测量参数、所述振动参数和转速参数,获得所述专用设备的不平衡质量相位;
6、根据所述专用设备的不平衡质量相位,调整所述专用设备的转子的转动参数。
7、可选地,获取专用设备的转子开始转动后,所述专用设备的动平衡机对所述转子进行动平衡测量的测量参数,包括:
8、获取专用设备的转子开始转动后,所述专用设备的动平衡机根据所述转子的振动特性选定的校正平面、对所述转子进行动平衡测量的平衡转速和对所述转子进行振动测量的测振点。
9、可选地,获取所述专用设备的转子的振动参数和转速参数,包括:
10、通过安装于所述专用设备上的振动传感器获取所述专用设备的转子的振动参数,以及,通过安装于所述专用设备上的转速传感器获取所述专用设备的转子的转速参数。
11、可选地,根据所述测量参数、所述振动参数和转速参数,获得所述专用设备的不平衡质量相位,包括:
12、根据在平衡转速下的测振点的振动矢量参数、校正平面的加试重以及平衡转速,获取影响系数矩阵,其中,所述平衡转速是根据所述转速参数确定的;
13、根据所述影响系数矩阵以及振动矢量阵列,得到所述专用设备的不平衡质量相位。
14、可选地,根据在平衡转速下的测振点的振动矢量、校正平面的加试重以及平衡转速,获取影响系数矩阵,包括:
15、定义影响系数akij:
16、akij=(bkij-bki0)/mj;
17、其中,在平衡转速ωk时测出第i个测振点的初始振动矢量为bki0,在第j个平面内加试重mj,在同一转速ωk时测出第i个测振点处振动量为bkij;
18、根据定义影响系数得到基于n个测振点选定的q个校正平面下的r个平衡转速包含的所有影响系数;将所有的影响系数排列成(n*r)行,q列的影响系数矩阵,并用a表示此矩阵。
19、可选地,根据所述影响系数矩阵以及振动矢量阵列,得到所述专用设备的不平衡质量相位,包括:
20、根据得到的a矩阵,进行修正,得到修正后的a’矩阵;
21、当专用设备转子达到预设转速时,得到专用设备的不平衡质量;
22、即:{b0}+a’{w}=0;
23、{b0}为振动矢量的阵列;基于上式计算得到{w};所求{w}即为不平衡质量。
24、可选地,根据所述专用设备的不平衡质量相位,调整所述专用设备的转子的转动参数,包括:
25、根据所述专用设备的不平衡质量相位,调整所述专用设备的转速以及台位切换。
26、一种专用设备的动平衡控制装置,包括:
27、触发模块,用于下发指令给变频器调节初始输出频率和电压;
28、控制模块,根据调节的初始输出频率和电压得到转子进行动平衡测量的测量参数及专用设备的转子的振动参数和转速参数;
29、计算模块,用于根据所述测量参数、所述振动参数和转速参数,获得所述专用设备的不平衡质量相位;根据所述专用设备的不平衡质量相位,调整所述专用设备的转子的转动参数。
30、一种专用设备的动平衡控制系统,包括:
31、专用设备的动平衡机以及如上述所述的专用设备的动平衡控制装置。
32、一种计算机存储介质,存储有指令,当所述指令在计算机上运行时,使得计算机执行如上述任一项所述的方法。
33、本发明的上述方案至少包括以下有益效果:
34、本发明的上述方案,通过获取专用设备的转子开始转动后,所述专用设备的动平衡机对所述转子进行动平衡测量的测量参数以及所述专用设备的转子的振动参数和转速参数;根据所述测量参数、所述振动参数和转速参数,获得所述专用设备的不平衡质量相位;根据所述专用设备的不平衡质量相位,调整所述专用设备的转子的转动参数。实现了高校准的精确性和效率;能够根据设备的工况实时调整控制参数,提高了校准的灵活性和适应性。
技术特征:
1.一种专用设备的动平衡控制方法,其特征在于,包括:
2.根据权利要求1所述的专用设备的动平衡控制方法,其特征在于,获取专用设备的转子开始转动后,所述专用设备的动平衡机对所述转子进行动平衡测量的测量参数,包括:
3.根据权利要求1所述的专用设备的动平衡控制方法,其特征在于,获取所述专用设备的转子的振动参数和转速参数,包括:
4.根据权利要求1所述的专用设备的动平衡控制方法,其特征在于,根据所述测量参数、所述振动参数和转速参数,获得所述专用设备的不平衡质量相位,包括:
5.根据权利要求4所述的专用设备的动平衡控制方法,其特征在于,根据在平衡转速下的测振点的振动矢量、校正平面的加试重以及平衡转速,获取影响系数矩阵,包括:
6.根据权利要求5所述的专用设备的动平衡控制方法,其特征在于,根据所述影响系数矩阵以及振动矢量阵列,得到所述专用设备的不平衡质量相位,包括:
7.根据权利要求6所述的专用设备的动平衡控制方法,其特征在于,根据所述专用设备的不平衡质量相位,调整所述专用设备的转子的转动参数,包括:
8.一种专用设备的动平衡控制装置,其特征在于,包括:
9.一种专用设备的动平衡控制系统,其特征在于,包括:
10.一种计算机存储介质,其特征在于,存储有指令,当所述指令在计算机上运行时,使得计算机执行如权利要求1至7任一项所述的方法。
技术总结
本发明提供一种专用设备的动平衡控制方法、装置及系统,所述方法包括:获取专用设备的转子开始转动后,所述专用设备的动平衡机对所述转子进行动平衡测量的测量参数以及所述专用设备的转子的振动参数和转速参数;根据所述测量参数、所述振动参数和转速参数,获得所述专用设备的不平衡质量相位;根据所述专用设备的不平衡质量相位,调整所述专用设备的转子的转动参数。实现了高校准的精确性和效率;能够根据设备的工况实时调整控制参数,提高了校准的灵活性和适应性。
技术研发人员:杨璇,侯生超,王迪
受保护的技术使用者:核工业理化工程研究院
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!