分布式高精度相控阵测量雷达的波束调度方法及波束调度系统与流程
本发明涉及雷达波束调度,具体地涉及一种分布式高精度相控阵测量雷达的波束调度方法及波束调度系统。
背景技术:
1、传统的探测雷达大多都是自发自收工作,微小的方位及仰角上的测量误差反映在较远空间距离上,就是较大的距离变化。目前信号处理系统对于回波处理上的优化算法研究已基本处于瓶颈,如何更进一步的提升雷达的测量精度已成为热门话题。理论上对同一个目标,系统里观察者的数量越多,那么其最终观察精度越高,因此多站协同工作也成为一个提升系统测量精度的可行的方向之一。基于上述,一发多收的多站分布式测量雷达应运而生。
2、一个传统相控阵雷达系统包含多个分系统,例如微波、显示、波束形成、回波处理、数据处理和波束调度等。而多站分布式的雷达系统包括多套微波、显示、波束形成、回波处理、数据处理和波束调度等,它和传统的相控阵雷达的区别在于,多站分布式系统只有一套雷达微波组件同时具有发射和接收功能,其他雷达的微波组件只具备接收功能。而传统的相控阵雷达系统在波束调度方向都是直接生成并发送自身雷达的时序及控制信息,不适合多站分布式的雷达波束调度系统。
技术实现思路
1、本发明实施例的目的是提供一种分布式高精度相控阵测量雷达的波束调度方法及波束调度系统,解决了多站下的每个雷达接收时序同步和目标位置统一等问题。
2、为了实现上述目的,本发明实施例提供一种分布式高精度相控阵测量雷达的波束调度方法,所述调度方法包括:
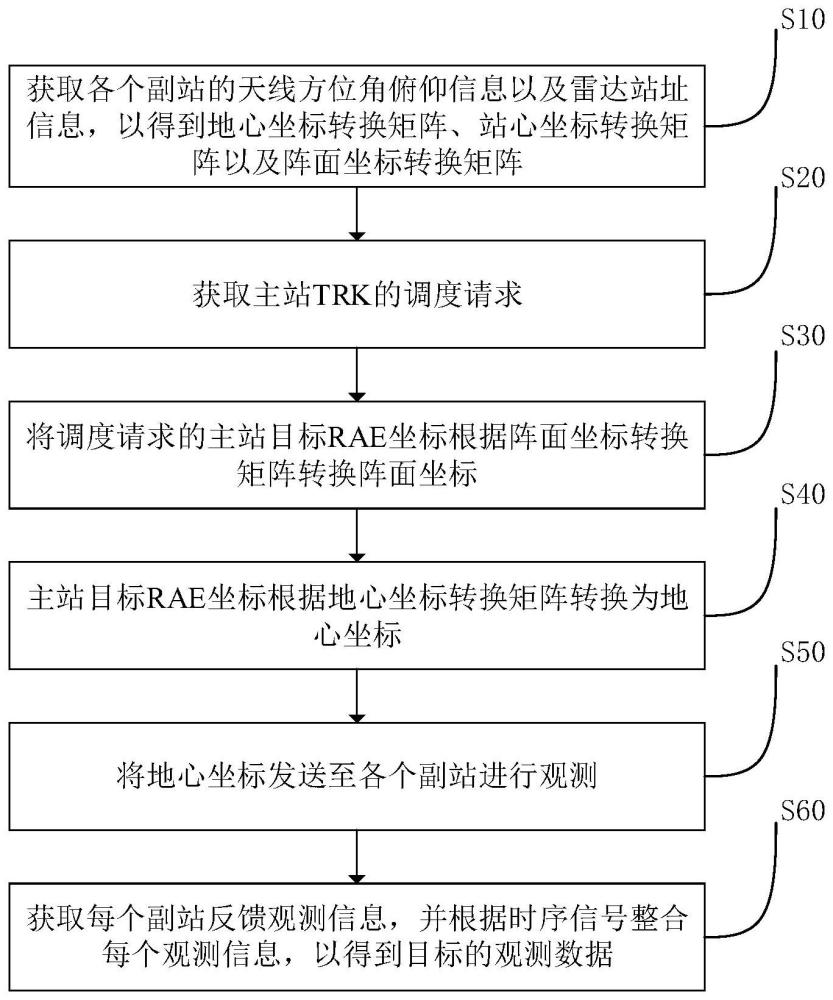
3、获取各个副站的天线方位角俯仰信息以及雷达站址信息,以得到地心坐标转换矩阵、站心坐标转换矩阵以及阵面坐标转换矩阵;
4、获取主站trk的调度请求;
5、将所述调度请求的主站目标rae坐标根据所述阵面坐标转换矩阵转换阵面坐标;
6、所述主站目标rae坐标根据所述地心坐标转换矩阵转换为地心坐标;
7、将所述地心坐标发送至各个副站进行观测;
8、获取每个所述副站反馈观测信息,并根据时序信号整合每个所述观测信息,以得到目标的观测数据。
9、可选地,主站与各个副站的脉冲时序相同。
10、可选地,获取各个副站的天线方位角俯仰信息以及雷达站址信息,以得到地心坐标转换矩阵、站心坐标转换矩阵以及阵面坐标转换矩阵,包括:
11、根据公式(1)至(4)确定主站雷达xyz坐标,
12、
13、xradar=(n+h)cos(lati)*cos(long), (2)
14、yradar=(n+h)cos(lati)*sin(long), (3)
15、zradar=(n*(1-e2)+h)*sin(lati), (4)
16、其中,xradar为所述主站雷达xyz坐标的x轴坐标,yradar为所述主站雷达xyz坐标的y轴坐标,zradar为所述主站雷达xyz坐标的z轴坐标,a为地球半径,e为第一曲率,lati为所述主站雷达经度,long为所述主站雷达纬度,h为所述主站雷达高度。
17、可选地,将所述调度请求的主站目标rae根据所述阵面坐标转换矩阵转换阵面坐标,包括:
18、根据公式(5)至(12)获取主站目标在阵面rae坐标系下的一个坐标值aplant,
19、
20、
21、
22、
23、
24、
25、
26、
27、根据公式(13)获取所述主站目标在所述阵面rae坐标系下的一个坐标值rplant,
28、rplant=r, (13)
29、根据公式(14)获取所述主站目标在所述阵面rae坐标系下的一个坐标值eplant,
30、
31、其中,r为所述主站目标在rae坐标系下的斜距,a为所述主站目标在所述rae坐标系下的方位角,e为所述主站目标在所述rae坐标系下的俯仰角,anta、ante分别为主站雷达天线两个方位的俯仰角,apnlat为所述主站目标在所述阵面rae坐标系下的斜距,rplant为所述主站目标在所述阵面rae坐标系下的方位角,eplant为所述主站目标在所述阵面rae坐标系下的俯仰角。
32、可选地,所述主站目标rae坐标根据所述地心坐标转换矩阵转换为地心坐标,包括:
33、根据公式(15)将所述主站目标rae坐标转换为所述主站目标enu坐标,
34、
35、其中,r为所述主站目标在rae坐标系下的斜距,a为所述主站目标在所述rae坐标系下的方位角,e为所述主站目标在所述rae坐标系下的俯仰角,etargrt、ntargrt和utargrt分别为所述主站目标在enu坐标系下的三个坐标值;
36、根据公式(16)至(17)将所述主站目标enu坐标转换为目标地心xyz坐标,
37、
38、
39、其中,lati为所述主站雷达经度,long为所述主站雷达纬度,xtarget、ytarget和ztarget分别为所述主站目标在xyz坐标系下的三个坐标值,etarget、ntarget和utarget分别为所述主站目标在enu坐标系下的三个坐标值,xradar为所述主站雷达xyz坐标的x轴坐标,yradar为所述主站雷达xyz坐标的y轴坐标,zradar为所述主站雷达xyz坐标的z轴坐标。
40、可选地,获取每个所述副站反馈观测信息,并根据时序信号整合每个所述观测信息,以得到目标的观测数据,包括:
41、根据公式(18)至(19)将所述目标地心xyz坐标转换为副站目标enu坐标,
42、
43、
44、其中,lati为副站雷达经度,long为所述副站雷达纬度,xtarget、ytarget和ztarget分别为所述主站目标在xyz坐标系下的三个坐标值,etarget、ntarget和utarget分别为所述副站目标在所述enu坐标系下的三个坐标值,xradar为所示副站雷达xyz坐标的x轴坐标,yradar为所述副站雷达xyz坐标的y轴坐标,zradar为所述副站雷达xyz坐标的z轴坐标;
45、根据公式(20)将所述副站目标enu坐标转换为副站目标rae坐标,
46、
47、其中,r为所述副站目标在所述rae坐标系下的斜距,a为所述副站目标在所述rae坐标系下的方位角,e为所述副站目标在所述rae坐标系下的俯仰角,etarget、ntarget和utarget分别为所述副站目标在所述enu坐标系下的三个坐标值;
48、根据公式(21)至(28)获取所述副站目标在阵面rae坐标系下的一个坐标值aplant,
49、
50、
51、
52、
53、
54、
55、
56、
57、根据公式(29)获取所述副站目标在所述阵面rae坐标系下的一个坐标值rplant,
58、rplant=r, (29)
59、根据公式(30)获取所述副站目标在所述阵面rae坐标系下的一个坐标值eplant,
60、
61、其中,r为所述副站目标在所述rae坐标系下的斜距,a为所述副站目标在所述rae坐标系下的方位角,e为所述副站目标在所述rae坐标系下的俯仰角,anta、ante分别为副站雷达天线两个方位的俯仰角,aplant为所述副站目标在所述阵面rae坐标系下的斜距,rplant为所述副站目标在所述阵面rae坐标系下的方位角,eplant为所述副站目标在所述阵面rae坐标系下的俯仰角。
62、另一方面,本发明提供一种分布式高精度相控阵测量雷达的波束调度系统,所述波束调度系统包括主站雷达、多个副站雷达以及地面站,所述主站雷达、多个副站雷达以及地面站相互连接,用于执行如上述任一所述的波束调度方法。
63、通过上述技术方案,本发明提供一种分布式高精度相控阵测量雷达的波束调度方法及波束调度系统,通过获取主站trk的调度请求,将主站目标rae坐标分别转换为阵面坐标和目标地心xyz坐标,其中,阵面坐标用于主站的波束编排,再将目标地心xyz坐标转换为副站目标rae坐标再转为阵面坐标,用于副站的波束编排。与现有技术相比,本发明采用时序同步处理确定了脉冲信息的基准,使得主副站在统一的基准下进行波束发射和接收。同时,主站管理所有雷达的控制信息使得系统在同一个控制信号的控制下,避免了多个信号控制需要同步的问题。
64、本发明实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!