一种光学雷达系统及其应用的制作方法
本发明涉及光学领域,具体涉及一种光学雷达系统及其应用。
背景技术:
1、随着ai技术的飞速发展,很多应用场景下需要精准的3d感知能力,目前技术上有多种3d感知方案:
2、1)激光雷达是其中的一种,但是成本昂贵,分辨率低的问题;
3、2)基于图像的视觉识别方式也可以获得不错的3d环境信息,但是前期需要大量的学习,面对陌生场景识别精度无法保证,甚至有可能失效,造成重大事故;
4、3)双目测距方式通过几何光学原理也可以直接获取环境的3d信息,但是计算过程需要精准的像素匹配,如果图片纹理特征不明显就无法有效进行像素匹配,导致无法完成测距计算。
5、因此,上述的每一种方式均存在一些难以克服的不足,本发明针对这些问题,提出了一种全新的技术方案。
技术实现思路
1、为解决上述技术问题,本发明提出一种光学雷达系统,包括:
2、用于发射可见光或者红外光的光发射组件;
3、接收光瞳数量n≥1、用于接收所述光发射组件发射出的可见光或者红外光的接收组件;以及
4、用于对接收的实时画面进行分析处理的处理器;
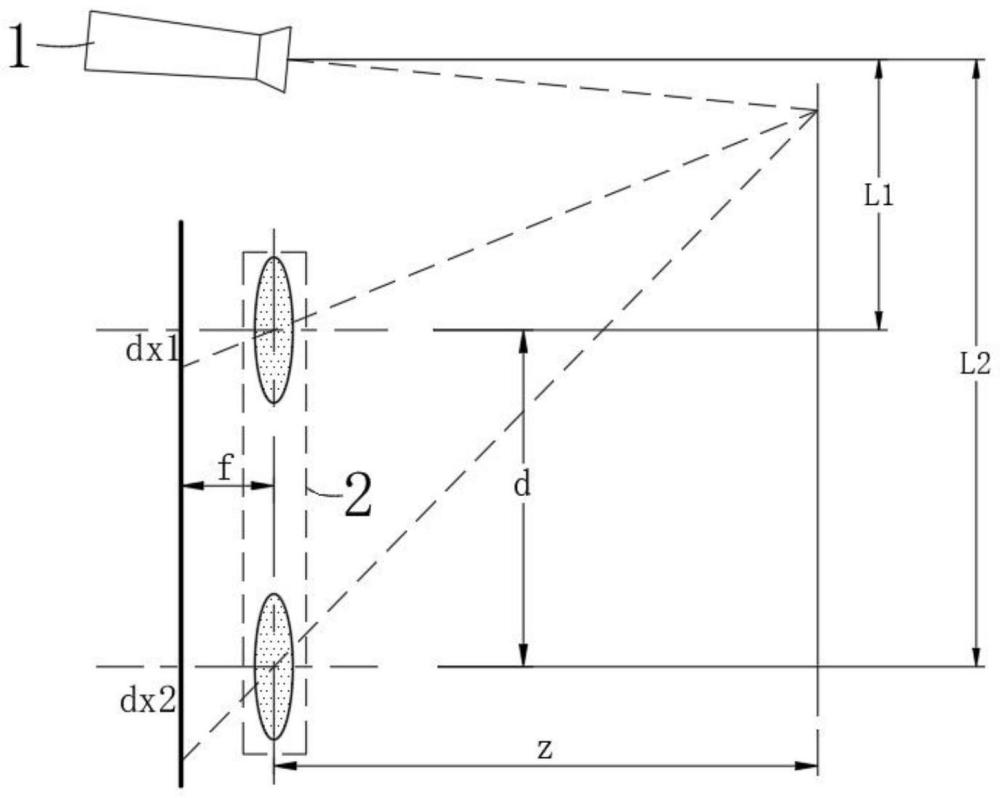
5、光发射组件发射的光打到物体表面后被漫反射,漫反射光被接收光瞳接收,不同方位,不同距离的物体反射回来的光束,在接收组件内成像的像点位置不同,处理器根据像点位置计算出物点真实位置的距离。
6、进一步地,所述光发射组件和接收组件为一体集成设计或者分立设计。
7、进一步地,所述光发射组件的扫描频率可调。
8、进一步地,所述光发射组件中心与第n个接收光瞳中心之间的距离为ln,单位㎝,满足:
9、进一步地,所述光发射组件同时发射多束可见光或者红外光进行并行测距。
10、进一步地,所述光发射组件发射的光还带有预定的编码信息,编码信息包括闪烁频率、波长、颜色中的一种或者多种。
11、进一步地,所述接收光瞳数量2≤n≤6。
12、进一步地,所述接收组件为像素≥256的光学摄像器,所述接收光瞳为光学摄像器的镜头。
13、进一步地,所述接收组件为3d摄像器。
14、进一步地,所述光学摄像器内设有多个感光芯片,单个感光芯片为彩色感光芯片、单色感光芯片、红外感光芯片、黑白感光芯片中的任意一种。
15、进一步地,所述3d摄像器内还设有与多个感光芯片的位置关系满足光学成像原理、用于将不同景深的像面光学转化为实像画面的光路整合镜组,所述光路整合镜组为多个子棱镜拼接形成的立方体棱镜,单个所述感光芯片分别与立方体棱镜的一个侧面相对应,通过立方体棱镜将多个感光芯片集成融合在一起。
16、进一步地,所述3d拍摄器的像素可调,处理器在对记录的实像画面进行分析处理过程中,通过像素融合实现像素调节,1<融合比例<100。
17、进一步地,所述光学雷达系统的工作模式为光学测距模式、视觉测距模式或者两者的混合模式。
18、本发明还提供该光学雷达系统的应用,应用于移动设备上,工作在混合模式下,光学测距模式的分辨率和扫面频率根据光学测距结果与视觉识别结果校验误差的大小进行调节。
19、进一步地,工作在混合模式下,处理器根据光学测距结果与视觉识别结果校验误差的大小向移动设备发送控制信号,控制移动设备进行速度调节。
20、与现有技术相比,本发明的优点在于:
21、1、激光雷达昂贵,还需要光源校准,会有温漂等问题,工作能耗较高,实际应用中还存在干扰问题,而本发明采用被动成像的工作模式,环境光不会造成干扰,同时还可以采用视觉成像和测距以及两者结合的模式,更加灵活。
22、2、摄像头视觉识别方式虽然工作效率高,但是特殊场景下识别误差大,难以保证深度识别可靠性,本发明可以在保证高工作效率的前提下,同时保证可靠性
23、3、本发明具有像素融合模式,针对不同场景可以切换像素数量,更加灵活多变,实用性强,本发明的元器件均可采用成熟得现有元器件,商业化成本也较低;
24、4、测量精度高、器件成熟、成本低,工作模式灵活。
技术特征:
1.一种光学雷达系统,其特征在于,包括:
2.根据权利要求1所述的一种光学雷达系统,其特征在于,所述光发射组件和接收组件为一体集成设计或者分立设计。
3.根据权利要求1所述的一种光学雷达系统,其特征在于,所述光发射组件的扫描频率可调。
4.根据权利要求1所述的一种光学雷达系统,其特征在于,所述光发射组件中心与第n个接收光瞳中心之间的距离为ln,单位㎝,满足:
5.根据权利要求1所述的一种光学雷达系统,其特征在于,所述光发射组件同时发射多束可见光或者红外光进行并行测距。
6.根据权利要求1所述的一种光学雷达系统,其特征在于,所述光发射组件发射的光还带有预定的编码信息,编码信息包括闪烁频率、波长、颜色中的一种或者多种。
7.根据权利要求1所述的一种光学雷达系统,其特征在于,所述接收光瞳数量2≤n≤6。
8.根据权利要求1所述的一种光学雷达系统,其特征在于,所述接收组件为像素≥256的光学摄像器,所述接收光瞳为光学摄像器的镜头。
9.根据权利要求8所述的一种光学雷达系统,其特征在于,所述接收组件为3d摄像器。
10.根据权利要求9所述的一种光学雷达系统,其特征在于,所述光学摄像器内设有多个感光芯片,单个感光芯片为彩色感光芯片、单色感光芯片、红外感光芯片、黑白感光芯片中的任意一种。
11.根据权利要求10所述的一种光学雷达系统,其特征在于:所述3d摄像器内还设有与多个感光芯片的位置关系满足光学成像原理、用于将不同景深的像面光学转化为实像画面的光路整合镜组,所述光路整合镜组为多个子棱镜拼接形成的立方体棱镜,单个所述感光芯片分别与立方体棱镜的一个侧面相对应,通过立方体棱镜将多个感光芯片集成融合在一起。
12.根据权利要求11任意一项所述的一种光学雷达系统,其特征在于:所述3d拍摄器的像素可调,处理器在对记录的实像画面进行分析处理过程中,通过像素融合实现像素调节,1<融合比例<100。
13.根据权利要求1至12任意一项所述的一种光学雷达系统,其特征在于,所述光学雷达系统的工作模式为光学测距模式、视觉测距模式或者两者的混合模式。
14.根据权利要求13所述的一种光学雷达系统应用于移动设备上,其特征在于:工作在混合模式下,光学测距模式的分辨率和扫面频率根据光学测距结果与视觉识别结果校验误差的大小进行调节。
15.根据权利要求13所述的一种光学雷达系统应用于移动设备上,其特征在于:工作在混合模式下,处理器根据光学测距结果与视觉识别结果校验误差的大小向移动设备发送控制信号,控制移动设备进行速度调节。
技术总结
本发明提出一种光学雷达系统及其应用,包括用于发射可见光或者红外光的光发射组件;接收光瞳数量n≥1、用于接收所述光发射组件发射出的可见光或者红外光的接收组件;以及用于对接收的实时画面进行分析处理的处理器。光发射组件发射的光打到物体表面后被漫反射,漫反射光被接收光瞳接收,不同方位,不同距离的物体反射回来的光束,在接收组件内成像的像点位置不同,处理器根据像点位置计算出物点真实位置的距离。
技术研发人员:王广军,余为伟
受保护的技术使用者:荆门市探梦科技有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!