导航路径生成方法、设备及存储介质与流程
本技术涉及定位导航,具体涉及一种导航路径生成方法、移动设备及计算机可读存储介质。
背景技术:
1、目前,针对室内环境中移动设备的定位导航,可以基于视觉、蓝牙、uwb以及wi-fi等数据信号来实现,但上述各个数据信号各自存在不同的缺点,而上述缺点均可能导致室内环境中进行导航时出现定位失效、导航路线失准等现象。另一方面,室内环境相对狭小而定位信息又存在误差,直接利用定位信息生成的向用户展示的导航路线可能会出现较大的跳动,导致展示的导航信息出现错误。
技术实现思路
1、本技术提供了一种导航路径生成方法、移动设备及计算机可读存储介质。
2、本技术实施方式涉及的导航路径生成方法,用于移动设备,包括:
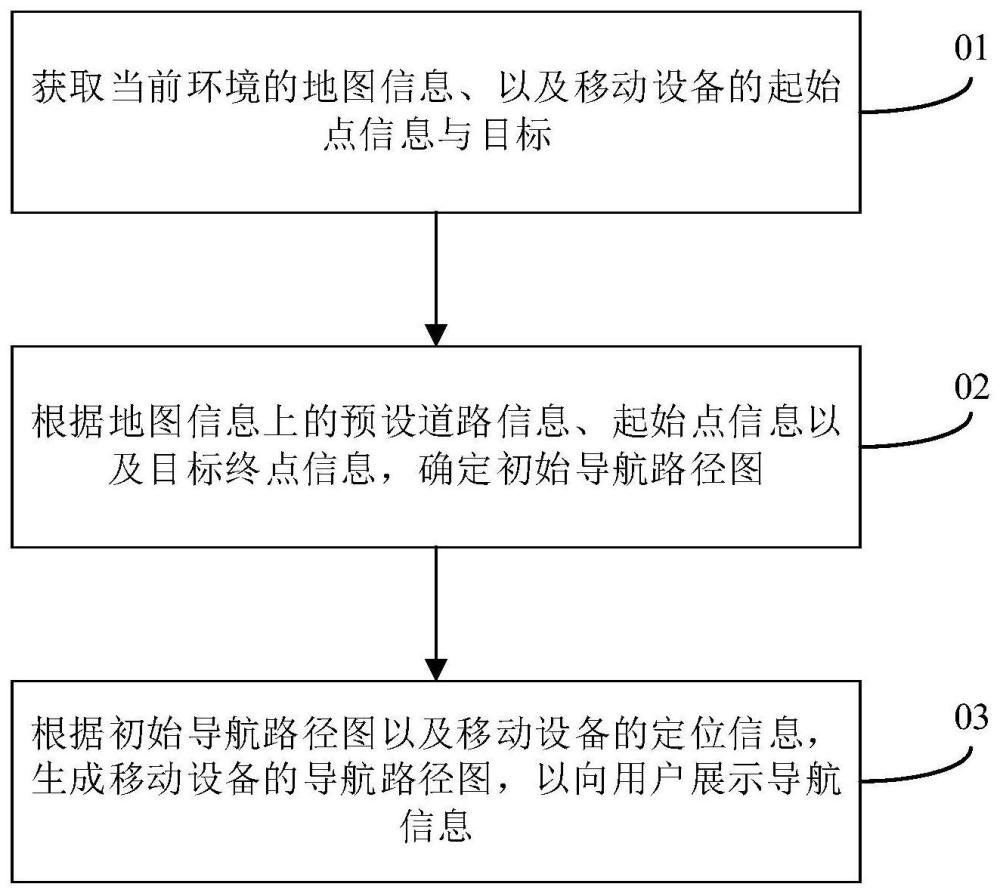
3、获取当前环境的地图信息、以及所述移动设备的起始点信息与目标终点信息;
4、根据所述地图信息上的预设道路信息、所述起始点信息以及所述目标终点信息,确定初始导航路径图,其中,所述预设道路信息包括所述当前环境中的道路中线以及道路交汇点;
5、根据所述初始导航路径图以及所述移动设备的定位信息,生成所述移动设备的导航路径图,以向用户展示导航信息。
6、如此,本技术能够基于当前室内环境的地图信息、以及导航的起始点与目标终点的信息,结合地图上的道路中线信息与道路交汇点信息对导航路线进行规划,并结合移动设备自身的定位信息,融合得到一个能够向用户直接展示的导航路径图,从而实现基于移动设备的路径导航。
7、在某些实施方式中,所述根据所述地图信息上的预设道路信息、所述起始点信息以及所述目标终点信息,确定初始导航路径图,包括:
8、将所述起始点以及所述目标终点关联至所述道路中线,获取所述起始点以及所述目标终点在所述道路中线上的投影位置,其中所述起始点对应第一投影位置,所述目标终点对应第二投影位置;
9、根据预设规则连接所述第一投影位置与第二投影位置,确定所述初始导航路径图。
10、如此,本技术能够将起始点与目标终点通过投影的方式关联到对应的道路中线上,并以道路中线为基础生成初始导航路径图,以使导航路线清晰、明确。
11、在某些实施方式中,所述根据预设规则连接所述第一投影位置与第二投影位置,确定所述初始导航路径图,包括:
12、根据预设规则连接所述第一投影位置与第二投影位置,确定待处理导航路径;
13、根据所述预设道路信息以及所述待处理导航路径,确定所述待处理导航路径覆盖的道路中线与道路交汇点;
14、根据所述待处理导航路径覆盖的道路中线与道路交汇点,确定所述初始导航路径图。
15、如此,本技术能够在连接了分别与起始点以及目标终点关联对应的投影位置形成一个待处理的导航路径的情况下,在待处理导航路径覆盖的道路范围内对道路信息以及道路交汇点信息进行图形加工,从而确定初始导航路径图。
16、在某些实施方式中,所述根据所述初始导航路径图以及所述移动设备的定位信息,生成所述移动设备的导航路径图,以向用户展示导航信息,包括:
17、获取当前空间内满足预设条件的优势wi-fi热点,其中所述优势wi-fi热点的信号置信度在所述当前空间内的全部wi-fi热点中最高;
18、在所述优势wi-fi热点存在的情况下,根据所述优势wi-fi热点产生的wi-fi信号,对所述地图信息执行区域划分;
19、在所述移动设备位于所述当前环境的不同位置的情况下,根据区域划分结果,确定所述移动设备的第一初步定位信息;
20、根据所述初始导航路径图以及所述第一初步定位信息,生成所述移动设备的导航路径图。
21、如此,本技术能够在当前室内环境中基于置信度最高的wi-fi信号对当前室内环境进行区域划分,并进一步根据移动设备所在的区域来确定移动设备的wi-fi定位信息。
22、在某些实施方式中,所述在所述优势wi-fi热点存在的情况下,根据所述优势wi-fi热点产生的wi-fi信号,对所述地图信息执行区域划分,包括:
23、在所述优势wi-fi热点存在的情况下,根据所述优势wi-fi热点产生的wi-fi信号,将所述地图划分为第一类别区域以及第二类别区域,其中所述第一类别区域用于收敛所述移动设备的定位范围,所述第二类别区域用于概略标记所述移动设备的定位范围;
24、所述根据所述初始导航路径图以及所述第一初步定位信息,生成所述移动设备的导航路径图,包括:
25、在所述移动设备位于所述第一类别区域内的情况下,确定所述移动设备的第一初步定位信息;
26、根据所述初始导航路径图以及所述第一初步定位信息,生成所述移动设备的导航路径图,以向用户展示导航信息。
27、如此,本技术能够基于置信度最高的wi-fi信号在划分出的不同区域为移动设备提供不同的定位信息,并以精确确定出的wi-fi定位以及初始导航路径图为数据基础,确定出最终向用户展示的导航路线图。
28、在某些实施方式中,所述根据所述初始导航路径图以及所述移动设备的定位信息,生成所述移动设备的导航路径图,以向用户展示导航信息,还包括:
29、在所述移动设备的惯性运动模块完成同步初始化的情况下,在第一预设时间长度内获取第一惯性运动数据;
30、在预设时间长度内获取到所述第一惯性运动数据的情况下,持续获取第二预设时间长度内获取第二惯性运动数据;
31、根据所述第二惯性运动数据,确定所述移动设备的第二初步定位信息;
32、根据所述第一初步定位信息以及所述第二初步定位信息,确定所述移动设备的导航路径图,以向用户展示导航信息。
33、如此,本技术在确定了移动设备wi-fi定位信息的基础上,还能够进一步获取惯性运动定位信息,并将上述两种定位信息进行融合,基于融合定位确定出向用户展示的导航信息。
34、在某些实施方式中,所述根据所述第一初步定位信息以及所述第二初步定位信息,确定所述移动设备的导航路径图,以向用户展示导航信息,包括:
35、根据所述第一初步定位信息,纠正所述第二初步定位信息,确定第二定位信息;
36、在根据电子罗盘数据确定所述第一初步定位信息以及所述第二定位信息符合预设行为模型的情况下,根据所述电子罗盘数据、所述第一初步定位信息以及所述第二定位信息,确定所述移动设备的导航路径图,以向用户展示导航信息。
37、如此,本技术还能够将wi-fi定位信息与imu定位信息的融合定位信息,基于移动设备自身的电子罗盘数据判断与预设行为模型的符合度,并在能够符合预设行为模型的情况下将电子罗盘数据也融合到定位信息中,以对生成的导航路径信息进行精确化修正。
38、在某些实施方式中,所述方法还包括:
39、在所述第二定位信息于所述预设道路上的投影与所述第一初步定位信息于所述预设道路上的投影间距大于预设长度的情况下,丢弃所述第一初步定位信息;
40、在根据所述电子罗盘数据确定所述第一初步定位信息以及所述第二定位信息不符合预设行为模型的情况下,丢弃所述电子罗盘数据。
41、如此,本技术还能够在wi-fi定位信息的更新明显滞后于imu定位信息的情况下舍弃wi-fi定位信息,也能够在基于移动设备自身的电子罗盘数据判断出融合信息与预设行为模型不符合的情况下避免引入电子罗盘数据,以防止造成数据污染。
42、本技术实施方式中的移动设备包括存储器与处理器,所述存储器存储有计算机程序,在所述计算机程序被所述处理器执行的情况下,所述移动设备能够实现上述的方法。
43、本技术实施方式中的计算机可读存储介质存储有计算机程序,在所述计算机程序被一个或多个处理器执行的情况下,实现上述的方法。
44、本技术的实施方式的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实施方式的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!