计步方法、装置、设备和介质与流程
本技术涉及运动测量,特别是涉及到一种计步方法、装置、设备和介质。
背景技术:
1、现市场上的计步设备的计步算法大致为:设备中搭载三轴传感器,根据三轴传感器采集到的值计算出步数,此方法有两个弊端:(1)传统的计步设备计步方法是固定单一的,只有在特定的计算对象类别上数据才具备准确性,当计步对象类别和计步方法不匹配时,将会导致读取到的计步值和计步对象实际值存在较大偏差。(2)同一个计步对象在不同的运动模式下(轻度运动、中度运动、高强度运动),运动幅度是不一样的,三轴传感器采集到的数据变化幅度也是不一样的,此时如果仅采用固定单一的计步方法,将会导致计步数据缺失或者偏大的情况,造成数据失误。
技术实现思路
1、本技术的主要目的为提供一种计步方法,旨在解决上述弊端中指出的技术问题。
2、为了实现上述申请目的,本技术第一方面提出一种计步方法,所述方法包括:
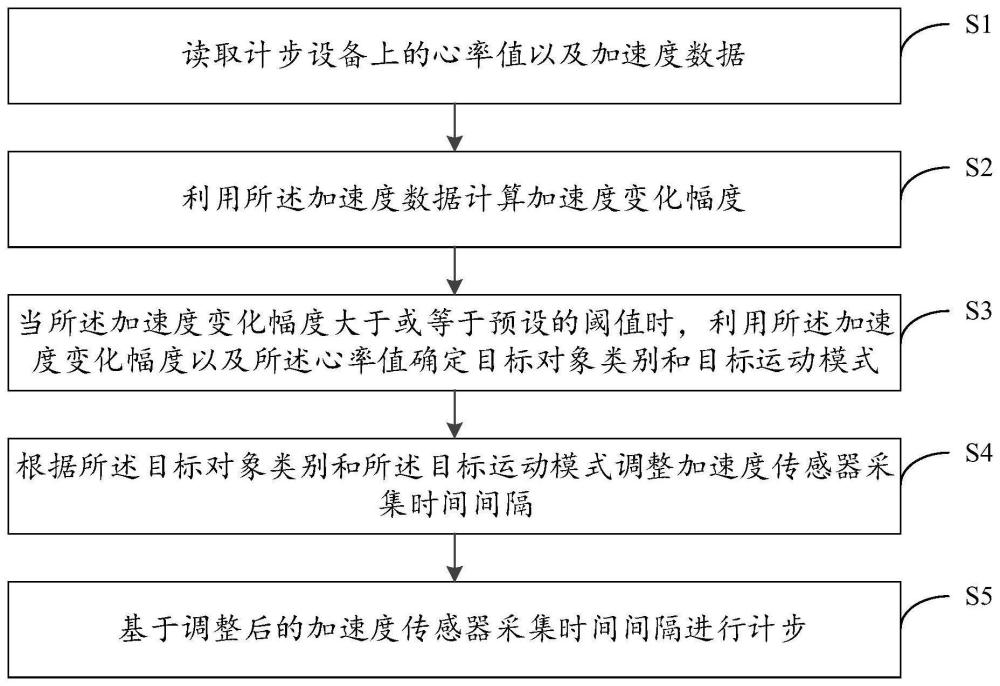
3、读取计步设备上的心率值以及加速度数据;
4、利用所述加速度数据计算加速度变化幅度;
5、当所述加速度变化幅度大于或等于预设的阈值时,利用所述加速度变化幅度以及所述心率值确定目标对象类别和目标运动模式;
6、根据所述目标对象类别和所述目标运动模式调整加速度传感器采集时间间隔;
7、基于调整后的加速度传感器采集时间间隔进行计步。
8、进一步的,所述利用所述加速度变化幅度以及所述心率值确定目标对象类别和目标运动模式的步骤包括:
9、获取各对象类别在各运动模式下的心率变化范围和加速度变化幅度范围;
10、利用所述加速度变化幅度、所述心率值以及各对象类别在各运动模式下的心率变化范围和加速度变化幅度范围确定目标对象类别和目标运动模式。
11、进一步的,所述利用所述加速度变化幅度、所述心率值以及各对象类别在各运动模式下的心率变化范围和加速度变化幅度范围确定目标对象类别和目标运动模式的步骤包括:
12、利用各对象类别在各运动模式下的心率变化范围和加速度变化幅度范围确定出同时满足所述加速度变化幅度和所述心率值的对象类别和运动模式;
13、将确定出的对象类别和运动模式作为候选对象类别和候选运动模式;
14、其中,一个候选对象类别对应一个候选运动模式;
15、判断所述候选对象类别的个数是否等于1;
16、若等于,则将所述候选对象类别作为目标对象类别,将所述候选运动模式作为目标运动模式;
17、若不等于,则根据欧式距离从所述候选对象类别和所述候选运动模式中确定出目标对象类别和目标运动模式。
18、进一步的,所述根据欧式距离从所述候选对象类别和所述候选运动模式中确定出目标对象类别和目标运动模式的步骤包括:
19、根据公式计算各候选对象类别在对应候选运动模式下的心率均值;其中,i∈[1,n],n为候选对象类别的个数,ri_max为第i个候选对象类别在对应候选运动模式下心率范围的最大值,ri_mim为第i个候选类别在对应候选运动模式下心率范围的最小值,ri_均为第i个候选对象类别在对应候选运动模式下的心率均值;
20、根据公式计算各候选对象类别在对应候选运动模式下的加速度变化幅度均值;si_max为第i个候选对象类别在对应候选运动模式下加速度变化幅度范围的最大值,si_mim为第i个候选类别在对应候选运动模式下加速度变化幅度范围的最小值,si_均为第i个候选对象类别在对应候选运动模式下的加速度变化幅度均值;
21、根据公式计算待分析数据点(r,s)和各候选数据点(ri_均,si_均)之间的欧式距离;r表示所述心率值,s表示所述加速度变化幅度;
22、比较计算得到的各欧式距离,得到最小欧式距离;
23、将最小欧式距离对应的候选对象类别和候选运动模式作为目标对象类别和目标运动模式。
24、进一步的,所述根据所述目标对象类别和所述目标运动模式调整加速度传感器采集时间间隔的步骤包括:
25、获取各对象类别在各运动模式下对应的加速度传感器采集时间间隔;
26、根据各对象类别在各运动模式下对应的加速度传感器采集时间间隔确定所述目标对象类别和所述目标运动模式对应的加速度传感器采集时间间隔;
27、将加速度传感器采集时间间隔调整为所述目标对象类别和所述目标运动模式对应的加速度传感器采集时间间隔。
28、进一步的,所述利用所述加速度数据计算加速度变化幅度的步骤包括:
29、获取前后两次采集到的加速度数据,将采集时间靠前的加速度数据作为第一加速度数据,将采集时间靠后的加速度数据作为第二加速度数据;
30、利用所述第一加速度数据计算第一加速度向量的模;
31、利用所述第一加速度数据和所述第二加速度数据计算第一加速度向量和第二加速度向量之间差向量的模;
32、根据所述第一加速度向量的模以及所述第一加速度向量和第二加速度向量之间差向量的模计算加速度变化幅度。
33、进一步的,所述根据所述第一加速度向量的模以及所述第一加速度向量和第二加速度向量之间差向量的模计算加速度变化幅度的步骤包括:
34、根据公式δsensor=max(δdata,data)/min(δdata,data)计算加速度变化幅度;其中,δdata表示第一加速度向量和第二加速度向量之间差向量的模,data表示第一加速度向量的模。
35、第二方面,本技术实施例提供一种计步装置,所述装置包括:
36、读取模块,用于读取计步设备上的心率值以及加速度数据;
37、计算模块,用于利用所述加速度数据计算加速度变化幅度;
38、确定模块,用于当所述加速度变化幅度大于或等于预设的阈值时,利用所述加速度变化幅度以及所述心率值确定目标对象类别和目标运动模式;
39、计步模块,用于根据所述目标对象类别和所述目标运动模式调整加速度传感器采集时间间隔;
40、更新模块,用于基于调整后的加速度传感器采集时间间隔进行计步。
41、第三方面,本技术实施例提供一种计算机设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序时实现上述任一项所述的计步方法的步骤。
42、第四方面,本技术实施例提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述任一项所述的计步方法的步骤。
43、有益效果:
44、本技术实施例提供一种计步方法,所述方法包括:读取计步设备上的心率值以及加速度数据;利用所述加速度数据计算加速度变化幅度;当所述加速度变化幅度大于或等于预设的阈值时,利用所述加速度变化幅度以及所述心率值确定目标对象类别和目标运动模式;根据所述目标对象类别和所述目标运动模式调整加速度传感器采集时间间隔;基于调整后的加速度传感器采集时间间隔进行计步。本技术实施例通过同时考虑心率值以及加速度变化幅度,这样可区分出不同的对象类别和运动模式,并根据不同的对象类别和运动模式调整加速度传感器采集时间间隔,这样不同的对象类别和运动模式对应不同的加速度传感器采集时间间隔,计算得到的步数更加准确。
- 还没有人留言评论。精彩留言会获得点赞!