基于标志桩法的滨海盐沼沉积速率自动测量装置及测量方法与流程
本发明属于滨海盐沼碳汇监测领域,具体涉及一种基于标志桩法的滨海盐沼沉积速率自动测量装置及测量方法。
背景技术:
1、蓝碳,也称海洋碳汇,是利用海洋活动及海洋生物吸收大气中的二氧化碳,并将其固定在海洋中的过程、活动和机制。介于海洋和陆地之间的海岸带地区捕获和埋藏的碳量远大于海洋所埋藏的碳量,这部分碳汇称为海岸带蓝碳,即狭义的蓝碳。滨海盐沼因具备很高的单位面积生产力和固碳能力,是蓝碳的重要组成部分和主要贡献者。沉积物碳埋藏速率可衡量沉积物碳库的变化,是滨海盐沼固碳能力评估的关键指标,也是滨海盐沼碳汇监测与计量过程中的必测指标。
2、碳埋藏速率为沉积速率和表层沉积物碳密度的乘积,受滨海盐沼特殊环境的影响,沉积速率的测定是碳埋藏速率测定的关键和难点。目前,常用测定沉积速率的方法主要有标志桩法、沉降板法、放射性同位素测年法和set法等。标志桩法因投入少、技术要求低,且在严格的作业质控下可实现毫米级别的沉积速率的定点、连续测量,因此是业务化监测工作中优先选用的沉积速率测定方法。
3、标志桩法是将一标志桩插入沉积物中,插入深度以达到基岩或不能自主下陷为限。通过测量一定时间间隔内标志桩露出地面的长度变化反映滩面高程的变化,前后两次的长度差值即沉积速率。考虑到标志桩本身会对冲淤产生一定的影响,为提高测量精度,通常以标志桩顶部为基准面,水平延伸出多个基准点,各基准点到滩面的垂直距离平均值作为滩面高程的测定值。该方法消除了标志桩本身对冲淤的影响,但显著增加了现场测量的难度和工作量。目前,基准点到滩面距离的测定主要由人工完成,测量方式主要有重锤线法和测量针(杆)法。为避免人工测量过程对标志桩周边区域的干扰,测量过程通常需要在标志桩周边搭建临时工作平台,额外增加了野外工作的工作量和难度。为科学表征标志桩区域滩面高程的变化,采用重锤线法或测量针(杆)法测量基准点到滩面距离过程中,通常尽量选取多个基准点,但数量越多,耗时越长,无法兼顾测量精度和测量效率。
技术实现思路
1、针对上述技术问题,本发明提供一种基于标志桩法的滨海盐沼沉积速率自动测量装置;实现了标志桩周围区域任意基准点到滩面距离的自动、快速、高精度测量,避免了测量过程对标志桩区域产生人为干扰的同时,极大提高了工作效率和测量精度,在业务化监测工作中具备良好的应用前景。
2、本发明是通过以下技术方案实现的:
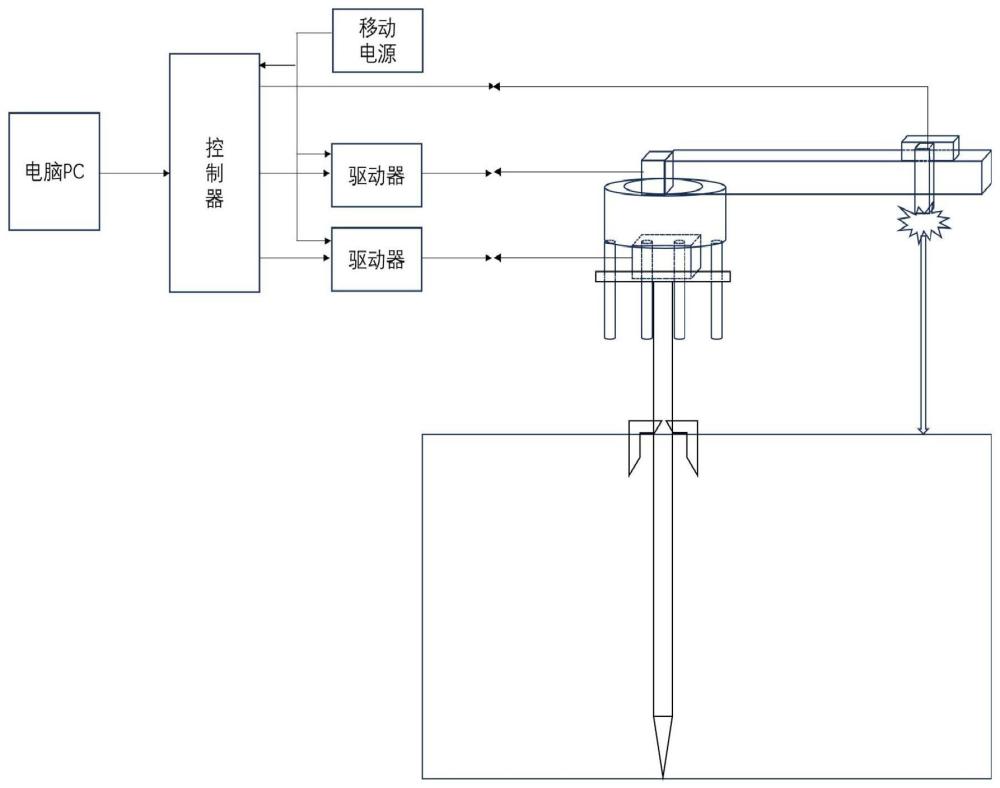
3、一种基于标志桩法的滨海盐沼沉积速率自动测量装置,所述自动测量装置包括:标志桩、滩面高程自动测量功能模块、滩面高程自动测量控制模块;
4、在所述标志桩的顶端设置水平基准平台;
5、所述滩面高程自动测量功能模块包括安装在所述水平基准平台上部的电动旋转云台、电动直线导轨和激光测距模块,所述电动直线导轨的一端和所述电动旋转云台固定连接,所述激光测距模块和所述电动直线导轨上的滑块固定连接;
6、所述滩面高程自动测量控制模块用于控制所述电动旋转云台的旋转以及控制所述滑块的滑动,进而控制所述激光测距模块到达目的基准点并进行滩面高程的测定。
7、进一步地,综合考虑标志桩稳定性和施工难度,所述标志桩选用直径为10-30mm的热轧带肋钢筋制作;
8、所述标志桩的底部为尖角结构;所述标志桩的长度为1.5-2m。
9、进一步地,在距离标志桩顶端0.3-0.5米处焊接若干个支撑支架。
10、进一步地,设置在所述标志桩顶端的水平基准平台为圆盘型,直径范围为10-20cm;所述水平基准平台采用不锈钢制作,在所述水平基准平台上设置贯穿的定位孔,所述定位孔用于电动旋转云台的安装和固定。
11、进一步地,所述电动旋转云台包括旋转云台和第一步进电机;所述旋转云台包括上层云台和下层云台,所述上层云台和所述下层云台的中间设置深沟球轴承;所述第一步进电机安装在所述下层云台的底部,且所述第一步进电机的转轴和所述上层云台连接,用于驱动所述上层云台水平旋转;
12、所述下层云台的底部设置若干个固定铜柱,所述下层云台通过固定铜柱和所述水平基准平台上的定位孔固定连接。
13、进一步地,所述电动直线导轨包括直线滑轨、滑块和第二步进电机;所述直线滑轨的一端和所述电动旋转云台的上层云台固定连接,所述激光测距模块和所述电动直线导轨上的滑块固定连接;所述第二步进电机用于驱动所述滑块沿着所述直线滑轨水平移动。
14、进一步地,所述直线滑轨采用铝合金材质,轨道长度50-100cm;
15、所述激光测距模块安装在所述滑块上,用于实现滩面高程的毫米级测量。
16、进一步地,所述滩面高程自动测量控制模块包括电脑pc、和所述电脑pc连接的控制器、驱动器和移动电源;
17、所述驱动器包括第一驱动器和第二驱动器,所述控制器和所述第一驱动器、所述第二驱动器及所述激光测距模块连接,所述移动电源用于为所述控制器、所述第一驱动器和所述第二驱动器供电;
18、所述第一驱动器和所述第一步进电极连接,所述第二驱动器和所述第二步进电极连接。
19、一种基于标志桩法的滨海盐沼沉积速率自动测量方法,采用所述基于标志桩法的滨海盐沼沉积速率自动测量装置,所述方法包括:
20、(1)测量工作开始前,完成标志桩、滩面高程自动测量功能模块和滩面高程自动测量控制模块的连接;在电脑pc端设置测定相关参数;
21、(2)测定开始后,将旋转云台复位、电动直线滑轨上的滑块复位;
22、(3)激光测距模块开始工作,测定当前基准点至滩面的距离,重复测定三次取平均值,完成首个基点的测定;首个基点的测定完成后,将滑块按照设置的参数沿滑轨水平移动一定距离后停止移动,激光测距模块完成第二个基准点的滩面高程测定;通过调整电动直线滑轨上滑块的位置,完成电动直线滑轨上所有设定基准点的滩面高程的测定;
23、(4)将滑块复位,启动旋转云台,按照设定的参数旋转云台完成一定角度和方向的旋转后,重复步骤(3),完成当前旋转云台位置下,对应的电动直线滑轨上所有设定基准点的滩面高程的测定;
24、(5)重复步骤(4),通过控制旋转云台的旋转及控制滑块的移动,按照设定的参数完成所有基准点的测定后,整个测量过程结束。
25、进一步地,所述方法还包括异常数据处理的步骤:
26、测量过程结束后,电脑pc对所有测量结果进行数据预处理,剔除异常数据,剔除异常数据的方法包括:
27、(1)激光测距模块对每个基准点重复测定3次后,电脑自动计算3次测量的平均值作为本基准点的测量结果,同时进行异常值判定:3次测量中,如果某个测量值与平均值之差的绝对值大于等于3倍的标准偏差,则判断为异常值;剔除异常值后,重新计算平均值作为单次测量结果;
28、(2)技术人员依据标志桩周边区域滩面高程的差异性及测量结果,建立滩面高程阈值区间,对所有基准点的测量结果进行筛查,超出阈值区间即判定为异常数据,剔除异常数据后,剩余所有基准点的测量结果平均值作为本次测量的测定值。
29、本发明的有益技术效果:
30、本发明提供的测量装置,将标志桩、滩面高程自动测量功能模块和滩面高程自动测量控制模块进行连接;人工操作电脑端,实现滩面高程的自动测量;实现了标志桩周围区域任意基准点到滩面距离的自动、快速、高精度测量,避免了测量过程对标志桩区域产生人为干扰的同时,极大提高了工作效率和测量精度,在业务化监测工作中具备良好的应用前景。
- 还没有人留言评论。精彩留言会获得点赞!