一种基于自适应大邻域搜索的无人机路线规划方法与流程
本发明涉及无人机路线规划领域,具体涉及一种基于自适应大邻域搜索的无人机路线规划方法。
背景技术:
1、通过对高危工厂污染点位的频繁监测,有利于第一时间发现污染问题,以更好地了解属地全域或局部大气污染的形成原因。无人机因其高灵活性和高可控性在污染源监测领域受到了广泛关注,通过对无人机进行合理的中心化调度,可以大大减少线下人工排查投入的成本,进而以较低的成本完成对工厂片区的监测。
2、但是现有的无人机线路规划方法在规划路线时,出于效率和续航考虑,对于某个途经点,通常只需要经过一次,不会涉及多次到达某个点。因此,现有的无人机线路规划方法并不适用于在多个点位之间来回监测。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的一种基于自适应大邻域搜索的无人机路线规划方法为面向污染源监测的无人机群协同调度问题提供了一种高效的解决方案。
2、为了达到上述发明目的,本发明采用的技术方案为:
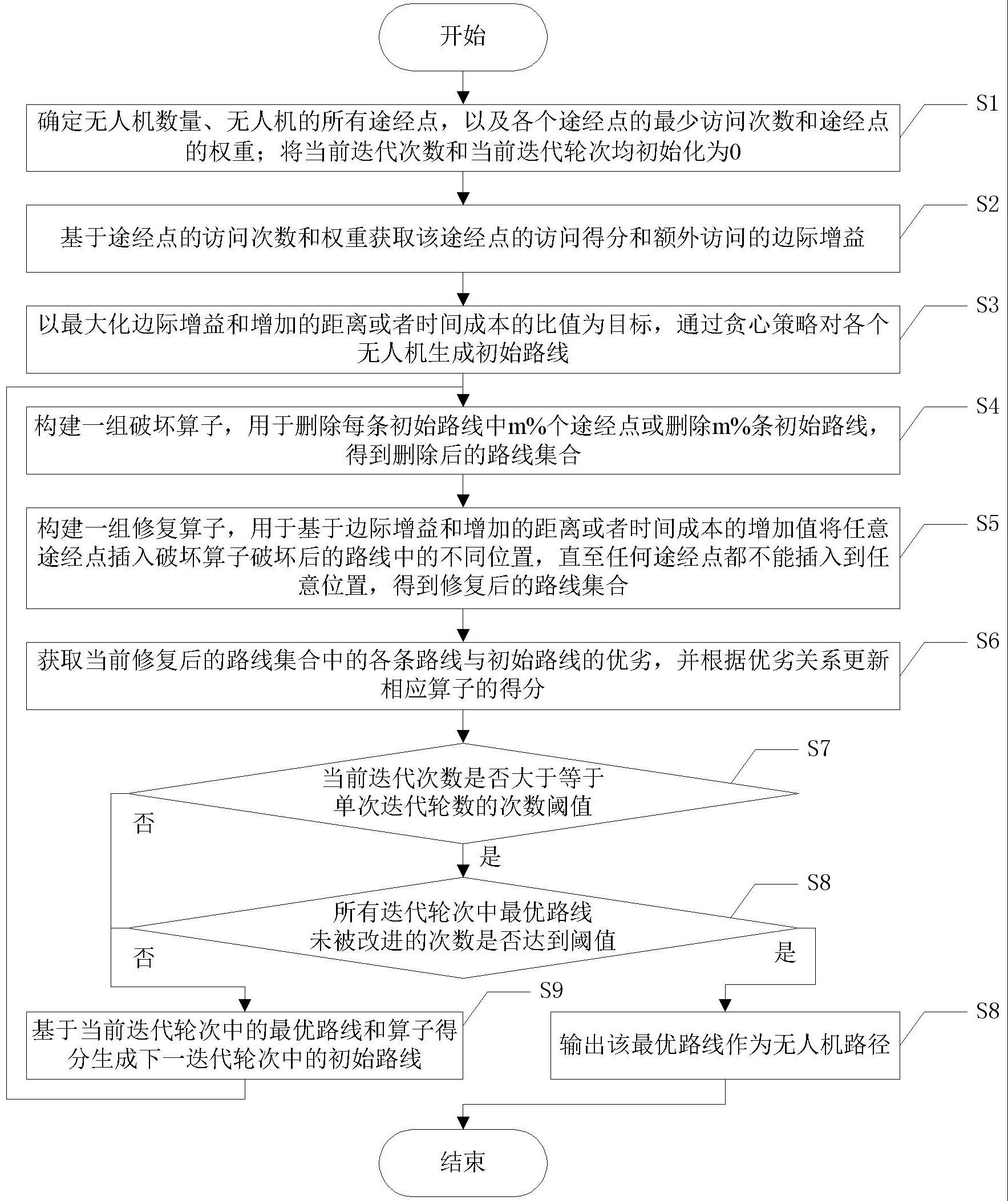
3、提供一种基于自适应大邻域搜索的无人机路线规划方法,其包括以下步骤:
4、s1、确定无人机数量、无人机的所有途经点,以及各个途经点的最少访问次数和途经点的权重;将当前迭代次数和当前迭代轮次均初始化为0;
5、s2、基于途经点的访问次数和权重获取该途经点的访问得分和额外访问的边际增益;
6、s3、以最大化边际增益和增加的距离或者时间成本的比值为目标,通过贪心策略对各个无人机生成初始路线;
7、s4、构建一组破坏算子,用于删除每条初始路线中m%个途经点或删除m%条初始路线,得到删除后的路线集合;
8、s5、构建一组修复算子,用于基于边际增益和增加的距离或者时间成本的增加值将任意途经点插入破坏算子破坏后的路线中的不同位置,直至任何途经点都不能插入到任意位置,得到修复后的路线集合;其中每个破坏算子和修复算子的初始权重相同;
9、s6、获取当前修复后的路线集合中的各条路线与初始路线的优劣,并根据优劣关系更新相应算子的得分;
10、s7、判断当前迭代次数是否大于等于单次迭代轮数的次数阈值,若是则得到当前迭代轮次中的最优路线,并进入步骤s8;否则进入步骤s9;
11、s8、判断所有迭代轮次中最优路线未被改进的次数是否达到阈值,若是则输出该最优路线作为无人机路径;否则进入步骤s9;
12、s9、基于当前迭代轮次中的最优路线和算子得分生成下一迭代轮次中的初始路线,返回步骤s4。
13、进一步地,步骤s2中访问得分的计算表达式为:
14、
15、其中表示途经点在单个周期内的访问得分;表示途经点的权重;为途经点在单个周期内的最少访问次数;为常数,。
16、进一步地,步骤s2中额外访问的边际增益的计算表达式为:
17、
18、其中为途经点在达到单个周期内的最少访问次数基础上多访问一次的边际增益。
19、进一步地,步骤s4中破坏算子共有四个,分别为随机删除算子、最差移除算子、相关移除算子和路径移除算子;
20、随机删除算子,用于随机删除每条初始路线中m%个途经点;
21、最差移除算子,用于计算删掉当前线路中某个点位所能节省的距离或时间成本与损失的边际增益,并选择损失的边际增益与节省的距离或时间成本比值最小的访问点进行删除,直至删除当前线路中m%个途经点;
22、相关移除算子,用于随机选择当前线路中一个途经点为中心点,并依次删除当前线路中距离该中心点最近的中m%个途经点;
23、路径移除算子,用于随机删除m%条初始路线。
24、进一步地,步骤s5中修复算子共有两个,分别为贪心插入算子和基于 k后悔值的插入算子;
25、贪心插入算子,用于获取将途经点插入破坏算子破坏后的路线中位置 l所带来的边际增益和造成的距离或时间成本的增加值,在每次插入时选择最大化的途经点和插入位置,直至任何途经点都不能插入到任意位置;
26、基于 k后悔值的插入算子,用于在每次插入途经点前,获取将途经点插入破坏算子破坏后的路线中位置 l所带来的边际增益和造成的距离或时间成本的增加值形成的单位价值,并按照单位价值由大到小的方式对当前的插入途经点进行排序,选择使 k后悔值最大化的途经点进行当前插入,直至任何途经点都不能插入到任意位置;其中;其中 k表示排序后的第 k个途经点的序号;表示将排序后的第 j个途经点插入破坏算子破坏后的路线中位置 l所带来的单位价值;表示将排序后的第1个途经点插入破坏算子破坏后的路线中位置 l所带来的单位价值。
27、进一步地,直至任何途经点都不能插入到任意位置的判定条件为:
28、插入使得整条路线超出最大距离限制或最大时间限制。
29、进一步地,步骤s6中根据优劣关系更新相应算子的得分的具体方法为:
30、在每个迭代轮次中:
31、若单次迭代后相应算子处理后得到的路线比当前所有路线中的最优路线更好,则将相应算子的得分加;
32、若单次迭代后相应算子处理后得到的路线比当前所有路线中的最优路线差但优于处理前的路线,则将相应算子的得分加;
33、若单次迭代后相应算子处理后得到的路线比处理前的路线差但被接受了,则将相应算子的得分加;
34、若单次迭代后相应算子处理后得到的路线比处理前的路线差且未被接受,则将相应算子的得分加;
35、其中,各算子在每个迭代轮次中的初始值为0,。
36、进一步地,步骤s9的具体方法包括以下子步骤:
37、s9-1、根据公式:
38、
39、获取第h+1个迭代轮次中第 d种算子的权重;其中为常数,;为第 h个迭代轮次中第 d种算子的权重;为第 h个迭代轮次中第 d种算子的得分;为第 d种算子在第 h个迭代轮次中被使用的总次数;
40、s9-2、基于第 h+1个迭代轮次中各种算子的权重,通过轮盘赌的方式选择算子进行新线路的生成。
41、进一步地,若算子处理后得到的路线优于处理前的线路,则将该算子处理后得到的路线作为当前迭代轮次中的最新线路;若算子处理后得到的路线劣于处理前的线路,则以设定概率来确定是否将该处理后得到的路线作为当前迭代轮次中的最新线路。
42、本发明的有益效果为:本发明可以在可接受的时间内合理地进行多无人机或者多条路线的中心化调度,以更好地满足监测需求。本发明还可以在简单修改之后应用于道路积尘走航监测或洒水车的路线规划等更多场景,应用前景和应用范围均十分广阔,为移动城市感知中无人机或专用监测车辆的调度提供了一种很好的解决方案。
- 还没有人留言评论。精彩留言会获得点赞!