雷达的方位安装误差的标定方法、系统、设备及存储介质与流程
本申请属于雷达标定的,涉及一种下线标定方法,特别是涉及一种雷达的方位安装误差的标定方法、系统、设备及存储介质。
背景技术:
1、目前,雷达在车辆中应用广泛,尤其是毫米波雷达,由于其全天时、全天候、测距和测速精度高等优点成为高级辅助驾驶(advanced driver assistant system,adas)和自动驾驶(autonomous driving,ad)功能中的一个重要传感器。由于整车装配工艺的误差累积,毫米波雷达(特别是角雷达)在完成安装后往往存在安装系统误差,其中方位安装误差会导致雷达的点云位置偏移,距离越远,偏移越大,严重影响毫米波雷达性能。因此在装配有毫米波雷达的车辆下线时,需要对毫米波雷达进行方位安装误差标定。
2、目前常用的下线标定方法包含静态标定和动态标定。静态标定是指利用角反和金属平板等强反射物进行安装误差标定,该方法有场地限制,需要搭建较高规格的标定场地,防止标定区域的金属物等强散射点对结果造成的影响。动态标定是指车辆下线时,通过一段特定路段后,输出安装误差,然而,现有的动态标定方法中存在较多限制,往往会导致误差估计异常。
技术实现思路
1、本申请提供一种雷达的方位安装误差的标定方法、系统、设备及存储介质,用于解决雷达方位安装误差的动态标定问题。
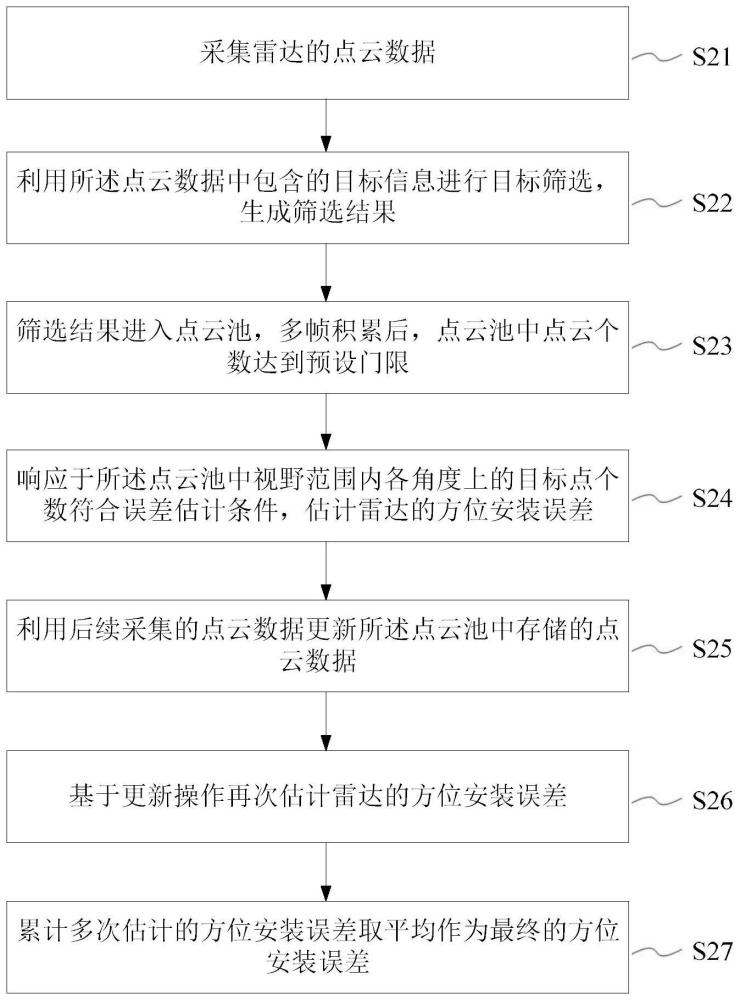
2、第一方面,本申请提供一种雷达的方位安装误差的标定方法,所述方法包括:采集雷达的点云数据;利用所述点云数据中包含的目标信息进行目标筛选,生成筛选结果;将所述筛选结果进入点云池,多帧积累后,所述点云池中点云个数达到预设门限;响应于所述点云池中视野范围内各角度上的目标点个数符合误差估计条件,估计雷达的方位安装误差;利用后续采集的点云数据更新所述点云池中存储的点云数据;基于更新操作再次估计雷达的方位安装误差;累计多次估计的方位安装误差取平均作为最终的方位安装误差。
3、在第一方面的一种实现方式中,所述雷达设于生产完成后待下线的车辆中;所述采集雷达的点云数据的步骤,包括:响应于所述车辆按照下线标定要求匀速直线通过测试路段,采集雷达的点云数据。
4、在第一方面的一种实现方式中,所述车辆按照下线标定要求匀速直线通过测试路段的判断,包括:通过获取的车速、加速度和角速度来确认车辆驾驶状态是否按照下线标定要求匀速直线通过测试路段。
5、在第一方面的一种实现方式中,所述目标信息包括:信噪比、距离、方位角、俯仰角和动静标志位;所述利用所述点云数据中包含的目标信息进行目标筛选,生成筛选结果的步骤,包括:筛选所述动静标志位为静目标的点;设定信噪比门限值、方位角门限值、距离门限值和俯仰角门限值;在所述动静标志位为静目标的点中,保留信噪比大于所述信噪比门限值、方位角小于所述方位角门限值、距离小于所述距离门限值且俯仰角小于俯仰角门限值的目标点。
6、在第一方面的一种实现方式中所述利用后续采集的点云数据更新所述点云池中存储的点云数据的步骤,包括:按照先入先出原则,更新点云池的点云数据。
7、在第一方面的一种实现方式中,所述累计多次估计的方位安装误差取平均作为最终的方位安装误差的步骤,包括:响应于方位安装误差的估计次数达到预设阈值,将所有估计的方位安装误差取平均值作为最终的方位安装误差;其中,所述方位安装误差的估计次数的预设阈值由标定场地的长度、车辆行驶的车速和环境中点云个数综合决定。
8、在第一方面的一种实现方式中在所述累计多次估计的方位安装误差取平均作为最终的方位安装误差的步骤之后,所述方法还包括:判断所述方位安装误差是否在校准范围内;若是,输出并存储所述方位安装误差;若否,输出错误原因。
9、第二方面,本申请提供一种雷达的方位安装误差的标定系统,所述系统包括:数据采集模块,被配置为采集雷达的点云数据;目标筛选模块,被配置为利用所述点云数据中包含的目标信息进行目标筛选,生成筛选结果;数据更新模块,被配置为将所述筛选结果存入点云池,多帧积累后,所述点云池中点云个数达到预设门限;误差估计模块,被配置为响应于所述点云池中视野范围内各角度上的目标点个数符合误差估计条件,估计雷达的方位安装误差;所述数据更新模块还被配置为利用后续采集的点云数据更新所述点云池中存储的点云数据;所述误差估计模块还被配置为基于更新操作再次估计雷达的方位安装误差;误差确定模块,被配置为累计多次估计的方位安装误差取平均作为最终的方位安装误差。
10、第三方面,本申请提供一种电子设备,所述电子设备包括:处理器及存储器;所述存储器用于存储计算机程序,所述处理器用于执行所述存储器存储的计算机程序,以使所述电子设备执行所述的方法。
11、第四方面,本申请提供一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被电子设备执行时实现所述的方法。
12、如上所述,本申请所述的雷达的方位安装误差的标定方法、系统、设备及存储介质,具有以下有益效果:
13、本申请的方位误差标定方法不完全依赖整车厂标定路段等间隔摆放的金属靶标或角反,还与使用环境中的静目标结合,因此即使雷达能力有限,中远距时目标离散,也不影响标定精度;标定路段除了等间隔摆放金属靶标或角反,也可以兼容设置护栏等情况。
14、此外,本申请通过更新点云池的方式,在占用较少内存资源的情况下,可以准确有效地估计车载毫米波雷达的方位安装误差,从而提高了毫米波雷达的检测结果准确性。
技术特征:
1.一种雷达的方位安装误差的标定方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述雷达设于生产完成后待下线的车辆中;所述采集雷达的点云数据的步骤,包括:
3.根据权利要求2所述的方法,其特征在于,所述车辆按照下线标定要求匀速直线通过测试路段的判断,包括:
4.根据权利要求1所述的方法,其特征在于,所述目标信息包括:信噪比、距离、方位角、俯仰角和动静标志位;所述利用所述点云数据中包含的目标信息进行目标筛选,生成筛选结果的步骤,包括:
5.根据权利要求1所述的方法,其特征在于,所述利用后续采集的点云数据更新所述点云池中存储的点云数据的步骤,包括:
6.根据权利要求1所述的方法,其特征在于,所述累计多次估计的方位安装误差取平均作为最终的方位安装误差的步骤,包括:
7.根据权利要求1所述的方法,其特征在于,在所述累计多次估计的方位安装误差取平均作为最终的方位安装误差的步骤之后,所述方法还包括:
8.一种雷达的方位安装误差的标定系统,其特征在于,所述系统包括:
9.一种电子设备,其特征在于,所述电子设备包括:处理器及存储器;
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被电子设备执行时实现权利要求1至7所述的方法。
技术总结
本申请提供一种雷达的方位安装误差的标定方法、系统、设备及存储介质,所述方法包括:采集雷达的点云数据;利用所述点云数据中包含的目标信息进行目标筛选,生成筛选结果;将所述筛选结果进入点云池,多帧积累后,所述点云池中点云个数达到预设门限;响应于所述点云池中视野范围内各角度上的目标点个数符合误差估计条件,估计雷达的方位安装误差;利用后续采集的点云数据更新所述点云池中存储的点云数据;基于更新操作再次估计雷达的方位安装误差;累计多次估计的方位安装误差取平均作为最终的方位安装误差。本申请可以准确有效地估计车载毫米波雷达的方位安装误差,从而提高了毫米波雷达的检测结果准确性。
技术研发人员:邱晓燕,张乾坤,田原
受保护的技术使用者:纵目科技(上海)股份有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!