高速平台实时SAR成像方法、装置、系统及存储介质与流程
本申请涉及雷达信号处理,尤其是涉及一种高速平台实时sar成像方法、装置及系统、计算机可读存储介质。
背景技术:
1、合成孔径雷达(synthetic aperture radar,sar)通过运动目标相对于雷达的相对运动来形成合成孔径,从而进行高分辨率成像。通常,sar成像具有距离远、可以全天时、全天候对地实时观察的特点,因为广泛应用于各种对地探测的场景中,而绝大多数sar成像设备受体积、架构及功耗的影响,往往只能采取数据后处理方法,导致影响sar成像的实时性,极大地限制了sar实时成像技术的发展。
技术实现思路
1、为解决现有存在的技术问题,本申请提供一种提升成像效率和实时性的高速平台实时sar成像方法、装置及系统、计算机可读存储介质。
2、为达到上述目的,本申请实施例的技术方案是这样实现的:
3、第一方面,本申请实施例提供一种高速平台实时sar成像方法,包括:
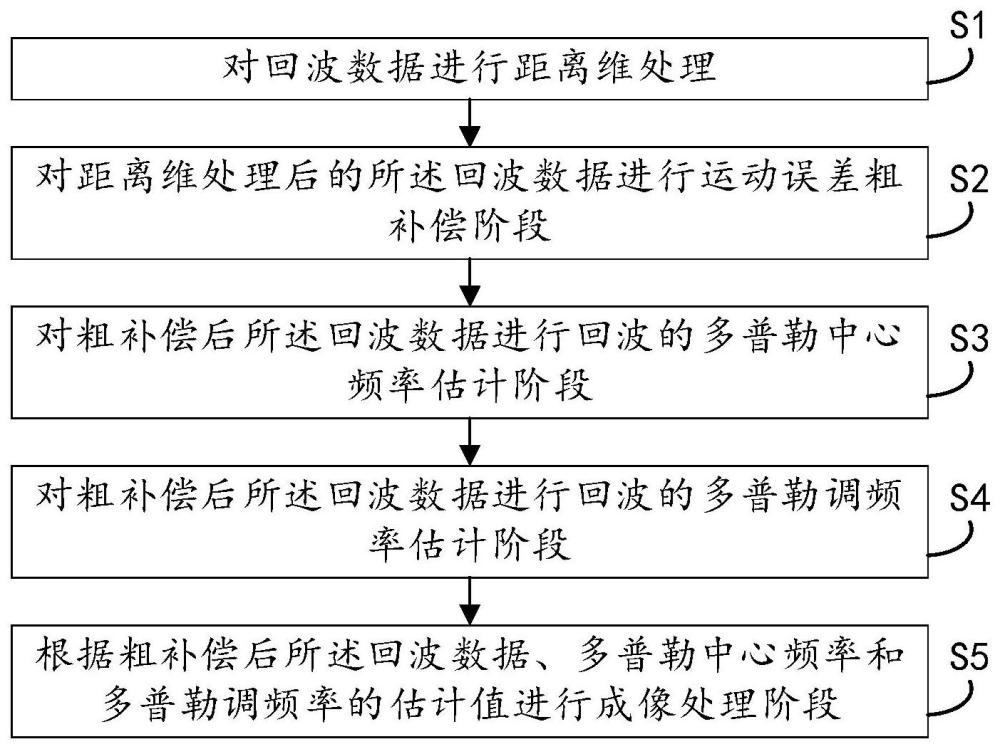
4、s1,对回波数据进行距离维处理:接收回波信号,根据所述回波信号通过距离维处理形成回波信号矩阵s1(τ,η);
5、s2,对距离维处理后的所述回波数据进行运动误差粗补偿阶段:获取惯导系统参数,根据所述惯导系统参数计算cpi各时刻雷达到波束中心地面投影点距离的理想值和实际值,根据所述理想值和实际值计算运动误差粗补偿的相位因子,利用所述相位因子对所述回波信号矩阵s1(τ,η)进行运动误差粗补偿,得到运动误差粗补偿后的回波信号矩阵s2(τ,η);
6、s3,对粗补偿后所述回波数据进行回波的多普勒中心频率估计阶段:根据所述运动误差粗补偿后的回波信号矩阵s2(τ,η),从距离维上划分为mfdc个距离单元矩阵,计算得到每个距离单元对应的多普勒中心频率估计值fdc(m);
7、s4,对粗补偿后所述回波数据进行回波的多普勒调频率估计阶段:基于方位累加和幅值强度排序在前的mfdr个距离单元计算多普勒调频率估计值fdr(m);
8、s5,根据粗补偿后所述回波数据、多普勒中心频率和多普勒调频率的估计值进行成像处理阶段:根据所述多普勒中心频率估计值fdc(m)和所述多普勒调频率估计值fdr(m)对所述运动误差粗补偿后的回波信号矩阵s2(τ,η)的方位维进行解线性调频,再通过傅里叶变换得到斜距图像s3(m,n),对所述斜距图像s3(m,n)进行相位梯度估计,估计出高阶相位误差并进行补偿,得到精细图像s4(m,n),对所述精细图像s4(m,n)进行斜地校正得到地距图像s5(m,n)。
9、第二方面,提供一种高速平台实时sar成像装置,包括:
10、距离维处理模块,用于接收回波信号,根据所述回波信号通过距离维处理形成回波信号矩阵s1(τ,η);
11、运动粗补偿模块,用于对距离维处理后的所述回波数据进行运动误差粗补偿阶段:获取惯导系统参数,根据所述惯导系统参数计算cpi各时刻雷达到波束中心地面投影点距离的理想值和实际值,根据所述理想值和实际值计算运动误差粗补偿的相位因子,利用所述相位因子对所述回波信号矩阵s1(τ,η)进行运动误差粗补偿,得到运动误差粗补偿后的回波信号矩阵s2(τ,η);
12、多普勒中心频率估计模块,用于对粗补偿后所述回波数据进行回波的多普勒中心频率估计阶段:根据所述运动误差粗补偿后的回波信号矩阵s2(τ,η),从距离维上划分为mfdc个距离单元矩阵,计算得到每个距离单元对应的多普勒中心频率估计值fdc(m);
13、多普勒调频率估计模块,用于对粗补偿后所述回波数据进行回波的多普勒调频率估计阶段:基于方位累加和幅值强度排序在前的mfdr个距离单元计算多普勒调频率估计值fdr(m);
14、成像模块,用于根据粗补偿后所述回波数据、多普勒中心频率和多普勒调频率的估计值进行成像处理阶段:根据所述多普勒中心频率估计值fdc(m)和所述多普勒调频率估计值fdr(m)对所述运动误差粗补偿后的回波信号矩阵s2(τ,η)的方位维进行解线性调频,再通过傅里叶变换得到斜距图像s3(m,n),对所述斜距图像s3(m,n)进行相位梯度估计,估计出高阶相位误差并进行补偿,得到精细图像s4(m,n),对所述精细图像s4(m,n)进行斜地校正得到地距图像s5(m,n)。
15、第三方面,提供一种高速平台实时sar成像系统,包括处理器和与所述处理器连接的存储器,所述存储器存储有可被所述处理器执行的计算机程序;所述处理器包括fpga和dsp,所述计算机程序被所述fpga和dsp共同执行时实现本申请任一实施例所述的高速平台实时sar成像方法。
16、第四方面,本申请实施例提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被所述处理器执行时实现本申请任一实施例所述的高速平台实时sar成像方法。
17、上述实施例所提供的高速平台实时sar成像方法,利用了惯导系统参数先对运动误差带来的回波相位误差进行粗补偿,再对运动误差粗补偿后的回波数据进行多普勒中心频率以及多普勒调频率的精细估计,利用惯导系统参数进行粗补偿可以减小后续对多普勒中心频率和多普勒调频率的参数估计所需的迭代计算量,可以有效提升sar成像实时性;其次,针对多普勒中心频率和多普勒调频率的估计阶段,将运动误差粗补偿后的回波数据从距离维上划分为多个距离单元矩阵,基于距离单元进行分组计算多普勒中心频率,以及基于方位累加和幅值强度排序在前的多个距离单元矩阵计算多普勒调频率,对回波数据的按照距离维划分距离单元分组处理,同样有利于减小多普勒参数估计的计算量,有利于提升成像效率和sar成像实时性;再次,利用精细估计得到的多普勒中心频率和多普勒调频率解线性调频的方法对运动误差粗补偿后的回波数据进行方位维压缩成像,并采用相位梯度估计,可以在满足实时性的前提下尽量提升成像精度。
18、上述实施例中,高速平台实时sar成像装置、系统及计算机可读存储介质与对应的高速平台实时sar成像方法实施例属于同一构思,从而分别与对应的高速平台实时sar成像方法实施例具有相同的技术效果,在此不再赘述。
技术特征:
1.一种高速平台实时sar成像方法,其特征在于,包括:
2.如权利要求1所述的高速平台实时sar成像方法,其特征在于,所述惯导系统参数包括cpi中心时刻波束指向地面的投影在目标系下的坐标值、cpi各时刻的雷达在目标系下的坐标值、cpi中心时刻雷达的速度v,cpi中心时刻的雷达波束前斜角θ。
3.如权利要求1所述的高速平台实时sar成像方法,其特征在于,所述根据所述运动误差粗补偿后的回波信号矩阵s2(τ,η),从距离维上划分为mfdc个距离单元矩阵,计算得到每个距离单元对应的多普勒中心频率估计值fdc(m),包括:
4.如权利要求3所述的高速平台实时sar成像方法,其特征在于,所述根据方位维数组sfdc_i(n)中各元素求解自相关函数相角值,计算出未解模糊时每个所述距离单元对应的多普勒中心频率包括:
5.如权利要求4所述的高速平台实时sar成像方法,其特征在于,所述利用惯导估计的多普勒中心频率对未解模糊时每个所述距离单元对应的多普勒中心频率对多普勒中心解模糊,计算得到每个所述距离单元对应的多普勒中心频率估计值fdc(m),包括:
6.如权利要求5所述的高速平台实时sar成像方法,其特征在于,所述基于方位累加和幅值强度排序在前的mfdr个距离单元计算多普勒调频率估计值fdr(m),包括:
7.如权利要求1所述的高速平台实时sar成像方法,其特征在于,所述根据所述多普勒中心频率估计值fdc(m)和所述多普勒调频率估计值fdr(m)对所述运动误差粗补偿后的回波信号矩阵s2(τ,η)的方位维进行解线性调频,再通过傅里叶变换得到斜距图像s3(m,n),对所述斜距图像s3(m,n)进行相位梯度估计,估计出高阶相位误差并进行补偿,得到精细图像s4(m,n),对所述精细图像s4(m,n)进行斜地校正得到地距图像s5(m,n),包括:
8.如权利要求7所述的高速平台实时sar成像方法,其特征在于,所述根据所述多普勒中心频率估计值fdc(m)和所述多普勒调频率估计值fdr(m)构造第一解线性调频参考函数sref3(1,η),利用所述第一解线性调频参考函数sref3(1,η)对所述运动误差粗补偿后的回波信号矩阵s2(τ,η)的方位维进行解线性调频,再通过傅里叶变换得到斜距图像s3(m,n),根据所述斜距图像s3(m,n)进行相位梯度估计,估计出高阶相位误差并进行补偿得到精细图像s4(m,n),对所述精细图像s4(m,n)进行斜地校正得到地距图像s5(m,n),包括:
9.如权利要求1所述的高速平台实时sar成像方法,其特征在于,所述接收回波信号,根据所述回波信号通过距离维处理形成回波信号矩阵s1(τ,η),包括:
10.一种高速平台实时sar成像装置,其特征在于,包括:
11.一种高速平台实时sar成像系统,其特征在于,包括处理器和与所述处理器连接的存储器,所述存储器存储有可被所述处理器执行的计算机程序;
12.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被所述处理器执行时实现如权利要求1至9中任一项所述的高速平台实时sar成像方法。
技术总结
本申请提供一种高速平台实时SAR成像方法、装置、系统及存储介质,包括:S1,对回波数据进行距离维处理。S2,运动误差粗补偿阶段。S3,对粗补偿后回波数据进行回波的多普勒中心频率估计阶段。S4,对粗补偿后回波数据进行回波的多普勒调频率估计阶段。S5,根据粗补偿后回波数据、多普勒中心频率和多普勒调频率的估计值进行成像处理阶段:根据多普勒中心频率估计值f<subgt;dc</subgt;(m)和多普勒调频率估计值f<subgt;dr</subgt;(m)对运动误差粗补偿后的回波信号矩阵s<subgt;2</subgt;(τ,η)的方位维进行解线性调频,再通过傅里叶变换得到斜距图像S<subgt;3</subgt;(m,n),对斜距图像S<subgt;3</subgt;(m,n)进行相位梯度估计,估计出高阶相位误差并进行补偿,得到精细图像S<subgt;4</subgt;(m,n),对所述精细图像S<subgt;4</subgt;(m,n)进行斜地校正得到地距图像S<subgt;5</subgt;(m,n)。
技术研发人员:毛堃麟,付连庆,胡荣,叶永生,李茂林,郑泰山,刘绍锐
受保护的技术使用者:英飞睿(成都)微系统技术有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!