一种基于融合算法的电力仪表巡检机器人自主导航方法
本发明涉及一种基于融合算法的电力仪表巡检机器人自主导航方法,属于特种机器人领域。
背景技术:
1、随着中国电力系统规模急速扩张和电力变电站数量不断增加,电力系统的稳定运行成为国家发展的重要保障。电力变电站作为电力系统的关键节点,承担了电力运输、电压转换和电能分配的重要角色。为确保变电站的安全稳定运行,对其内部的电气设备进行定时巡检具有十分重要的意义。随着变电站数量的不断增加,传统的人工巡检方式面临着巡检任务繁重、效率低下、质量难以保障等问题。特别是在恶劣天气条件下,人工巡检的及时性和准确性更受到挑战。此外,人工巡检受到人员主观判断和工作经验的影响,存在一定的漏检和误检可能,对电力系统的稳定运行构成潜在威胁。
2、为解决这些问题,电力仪表巡检机器人应运而生。电力仪表巡检机器人能够通过自主导航技术在变电站内部规划出全局地图的最短路径并在运动过程中实时避障,搭载多种传感器实时感知电力设备的运行状态,自动记录检测结果并发出警告信号。这样的巡检过程不仅能极大减轻巡检人员的负担,提高巡检效率和准确性,还能降低电力设备故障的发生概率,保障电力系统的稳定运行。
技术实现思路
1、发明目的:为了克服现有技术中存在的不足,本发明提供在现有智能化技术的基础上基于融合算法的电力仪表巡检机器人自主导航方法实现巡检机器人全自动式的路径规划。
2、技术方案:为解决上述技术问题,本发明的一种基于融合算法的电力仪表巡检机器人自主导航方法,具体包括以下步骤:
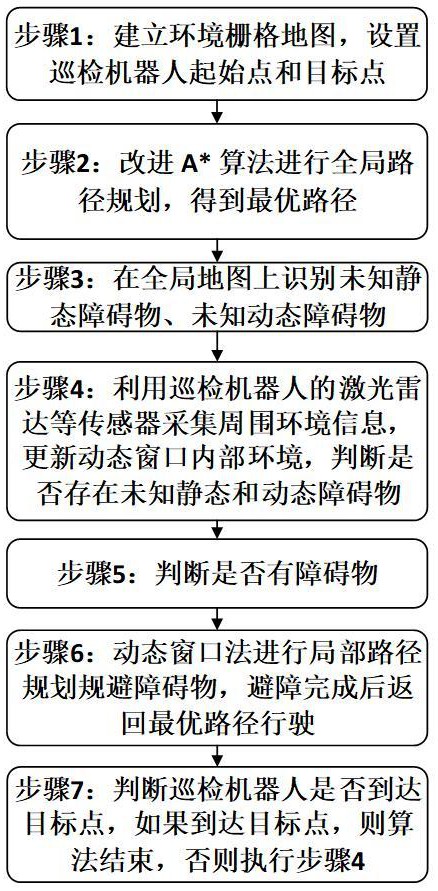
3、步骤1:建立环境栅格地图,设置巡检机器人起始点和目标点;
4、步骤2:利用改进 a* 算法进行全局路径规划,得到最优路径;步骤3:在全局地图上识别未知静态障碍物、未知动态障碍物;
5、步骤4:利用巡检机器人携带的激光雷达等传感器采集周围环境信息,更新动态窗口内部环境,判断是否存在未知静态和动态障碍物;
6、步骤5:如果没有障碍物,继续沿最短无障碍路径行驶;如果有障碍物,进行碰撞预测,实行避障措施;
7、步骤6:使用改进安全距离评价子函数的动态窗口法进行局部路径规划规避障碍物。巡检机器人沿局部规划路径运动,避障完成后返回最优路径行驶;
8、步骤7:判断巡检机器人是否到达目标点,如果到达目标点,则算法结束,否则执行步骤4。
9、本发明技术方案的进一步限定为,所述改进 a* 算法的方法,具体方法步骤如下:
10、s1:在路径优劣评价函数中引入自适应权重因子,该因子根据搜索过程中遇到障碍物的概率进行动态调整。此自适应性调整旨在迅速规划出满足电力仪表巡检机器人运动需求的最优路径,有效应对环境变化;
11、s2:剔除s1规划路径中的所有冗余转折点,以获得更为平滑且安全的路径。通过消除不必要的转折点,进一步优化路径设计,提高机器人在电力仪表间的运动效率,并降低机械损耗和能耗;
12、s3:对s2中的转折点进行圆弧处理,以减小路径长度和转折度,满足巡检机器人的几何特性;通过引入圆弧处理,巧妙地改善路径几何形状,降低机器人行进距离,同时减轻转弯时的机械应力,提高机器人运动的效率和稳定性;
13、通过上述改进步骤,本发明改进a*算法在电力仪表巡检过程中进一步提升了路径规划的自适应性、路径平滑性以及对巡检机器人几何特性的充分考虑,有效增强了巡检机器人导航的鲁棒性和性能。
14、进一步地,步骤6中,改进安全距离评价子函数的动态窗口法为:
15、;式中,,分别为巡检机器人的线速度和角速度;为方位偏转角评价子函数,表示巡检机器人前进方向与目标点方向之间的角度差;为安全距离评价子函数,其中为全局已知障碍物、未知动态障碍物及静态障碍物与模拟路径之间的最短距离;为安全惩罚函数;为速度评价函数,表示巡检机器人在当前状态下的速度;公式中、、、、 是权重系数用于调整巡检机器人运动方向、距离和速度等因素对评估函数结果的影响。进一步地,步骤2中,路径优劣评价函数优化,计算式为:
16、;
17、;
18、;
19、其中,;;式中,为在状态空间中从起始点到节点的实际代价;为从节点到目标状态的最佳路径的估计代价;为从起始点经节点到目标点的代价估计;为自适应权重因子;、为巡检机器人沿 x轴 和 y轴方向遍历的节点数;为二进制指示变量,判断位置处是障碍物则为 1,否则为 0;为起始节点与目标节点之间无障碍节点数;为欧氏距离。为从起点节点到当前节点的实际代价距离;为巡检机器人的安全半径;为当前节点与下个节点的路径到距离最近障碍物的最小距离;为安全代价权重。
20、进一步地,步骤2中,路径平滑度优化,计算式为:
21、;式中,起始点s、转折点n3、目标点t坐标分别为、、;、、、为切点坐标;、为圆心o的坐标。
22、本发明的有益效果:
23、(1)在全局规划中,通过在传统 a* 算法的路径优劣评价函数中引入自适应权重因子和安全半径,并对全局路径进行沉余节点优化和圆弧处理。经实验验证,与传统 a* 算法、跳点 a* 算法相比,改进 a* 算法的安全性、转折角度、平滑度得到明显提升,且路径更短。
24、(2)在局部规划中,建立巡检机器人的运动学模型,采用改进安全距离评价子函数的动态窗口法,使得巡检机器人避开未知障碍物的能力提升;通过将改进 a* 算法和动态窗口法融合,使得巡检机器人的动态避障能力提升。经实验验证,融合改进动态窗口法后,具备了在复杂的电力仪表间环境中找到最短无障碍路径的能力,实现了巡检机器人实时避开未知障碍,满足了无碰撞到达目标点位。
25、综上,本发明提供的一种基于融合算法的电力仪表巡检机器人自主导航方法,将改进的融合算法应用于巡检机器人上,在保证机器人巡检目标识别准确性的同时提高巡检机器人智能化水平,实现电力仪表间的无人化,通过对巡检机器人路径优化有利于降低机器人长期巡检的能耗,降低拐弯对电机的磨损程度,减少电池充电次数,延长巡检机器人使用寿命,提高经济性。本发明实施简单,成本低,精确度高,有效提高巡检机器人智能化水平,实现电厂无人化运行。
技术特征:
1.一种基于融合算法的电力仪表巡检机器人自主导航方法,其特征在于具体步骤如下:
2.根据权利要求书1所述的一种基于融合算法的电力仪表巡检机器人自主导航方法,其特征在于,步骤2改进 a* 算法的方法,具体如下:
3.根据权利要求书1所述的一种基于融合算法的电力仪表巡检机器人自主导航方法,其特征在于,步骤6中,改进安全距离评价子函数的动态窗口法为:
4.根据权利要求书2所述的一种基于融合算法的电力仪表巡检机器人自主导航方法,其特征在于,s2中,路径优劣评价函数优化,计算式为:
5.根据权利要求书2所述的一种基于融合算法的电力仪表巡检机器人自主导航方法,其特征在于,s2中,路径平滑度优化,计算式为:
技术总结
本发明涉及一种基于融合算法的电力仪表巡检机器人自主导航方法,具体如下:建立栅格地图,设置机器人起始点和目标点;根据改进A*算法进行全局路径规划,得到最优路径;在全局地图上识别障碍物;利用巡检机器人的激光雷达等传感器采集周围环境信息,更新动态窗口内部环境,判断是否存在未知静态和动态障碍物;通过改进安全距离评价子函数的动态窗口法进行局部路径规划规避障碍物。巡检机器人沿局部规划路径运动,避障完成后返回最优路径行驶并判断巡检机器人是否到达目标点。本发明实施简单,精确度高,有效提高巡检机器人在电力仪表间中找到最短无障碍路径的效率,实时避开未知障碍,安全到达目标点位。
技术研发人员:马自勇,朱星光,马立东,田英虎,王韬
受保护的技术使用者:太原科技大学
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!