一种基于基可达图的多智能体最优任务分配与规划方法、装置及系统
本发明属于路径规划领域,涉及一种基于基可达图的多智能体最优任务分配与规划方法、装置及系统。
背景技术:
1、多智能体系统是一个综合了多个学科技术的复杂系统,目前已在各个行业有了广泛的应用。随着多智能体行业的不断发展,智能化与自动化水平的不断提高,多智能体已经逐渐渗透到了人们的日常生活中,比如物流运输、餐饮服务、农业采摘、搜寻救援等方面。多智能体如无人车辆、水下航行器等无人设备,能够有效的降低人工成本,并适用于一些危险环境。
2、一个智能体能够自主实现环境感知、路径规划、控制执行等,其中路径规划是核心问题之一。路径规划技术能够为智能体提供一条最优或次优且避开障碍物的移动路径,以减小智能体移动时间与能耗。而现有技术中,复杂任务下的任务分配与规划通常基于已知全局地图信息,包括任务地点和障碍物地点。针对求解的结果可以将相关算法分为最优算法与非最优算法,在最优算法中,当前的主流算法有dijkstra算法、整数线性规划。上述的dijkstra算法擅于处理简单的可达性任务,而整数线性规划方法在面临地图较大、任务较复杂情况下,求解效率较低。但实际环境地图较大、任务较复杂,往往一条路径需要途径多个任务点,且任务点之间可能存在一定的顺序要求,基于全局地图信息搜索最优路径,存在计算量大、最优路径规划时间长,导致效率低的问题。
技术实现思路
1、本发明的目的是提供一种基于基可达图的多智能体最优任务分配与规划方法、装置及系统,该方法以解决现有技术基于全局地图信息、复杂任务情况下存在的最优路径规划时间长、效率低且规划的路径质量不高的问题。
2、为了达到上述目的,本发明提供一种基于基可达图的多智能体最优任务分配与规划方法,主要步骤包括:
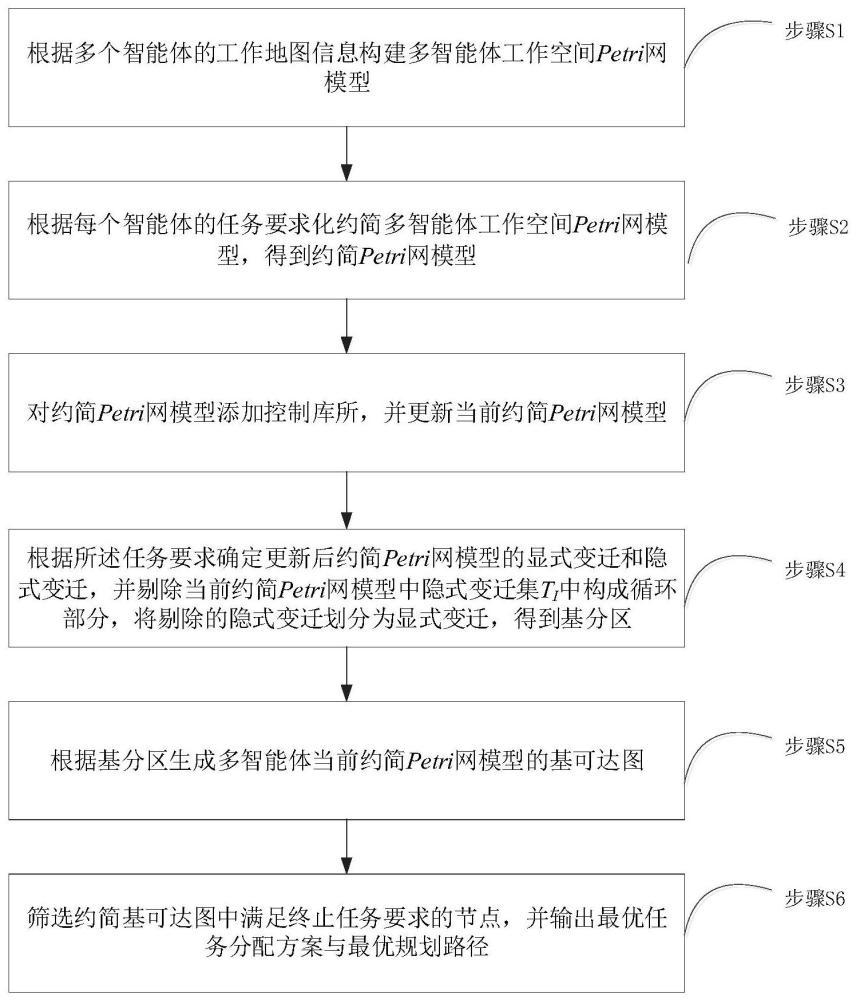
3、步骤s1:根据多个智能体的工作地图信息构建多智能体工作空间petri网模型;
4、步骤s2:根据每个智能体的任务要求约简多智能体工作空间petri网模型,得到约简petri网模型,其中任务要求指的是每个智能体需执行的任务;
5、步骤s3:对约简petri网模型添加控制库所,并更新当前约简petri网模型;
6、步骤s4:根据任务要求确定更新后约简petri网模型的显式变迁和隐式变迁,并剔除当前约简petri网模型中隐式变迁集ti中构成循环部分,将剔除的隐式变迁划分为显式变迁,得到基分区;;
7、步骤s5:根据基分区生成多智能体当前约简petri网模型的基可达图;
8、步骤s6:筛选基可达图中满足终止任务要求的节点,并输出最优任务分配方案与最优规划路径。
9、可选地,步骤s1具体包括:
10、根据多智能体的工作地图信息中的栅格、各栅格的连接关系以及各栅格间的距离信息,构建多智能体工作空间petri网系统;
11、基于多智能体工作空间petri网系统构建关于库所集合、变迁集合、前关联矩阵以及后关联矩阵的多智能体工作空间petri网模型。
12、可选地,多智能体工作空间petri网模型n表示为:
13、n=(p,t,pre,post),
14、其中n,p为库所集合,t为变迁集合,pre为前关联矩阵,post为后关联矩阵。
15、可选地,步骤s2具体包括:根据每个智能体的任务要求确定每个智能体在多智能体工作空间petri网模型中的起点、任务点以及终点;
16、根据起点、任务点以及终点,分别确定当前多智能体工作空间petri网模型中最短路径集
17、删除最短路径集中相关库所、相关变迁之外的无关库所和无关变迁,得到约简petri网模型。
18、可选地,步骤s3具体包括:根据每个智能体的任务要求对约简petri网模型添加控制库所,并更新当前约简petri网模型,其中,控制库所主要包含限制库所pc、观测库所po和记录库所pr。
19、可选地,步骤s4具体包括:在当前约简petri网模型上根据任务要求划分出仅包含给定显式变迁集te与隐式变迁集ti的一组划分。
20、可选地,基于当前显式隐式变迁划分方式,剔除当前约简petri网模型中的隐式变迁集ti中构成的循环部分,并将剔除的隐式变迁划分至显式变迁集,得到新的一组划分方式,称为基分区d,生成多智能体约简petri网模型的基可达图。
21、可选地,步骤s6具体包括:基于基可达图,根据定义的终点控制规范筛选满足终止状态要求的节点,并输出最优任务分配方案与最优规划路径。
22、本发明还提供了一种基于基可达图的多智能体最优任务分配与规划装置,包括存储器、处理器以及存储在存储器中并可在处理器上运行的计算机程序,处理器执行计算机程序时实现上述方法实施例中任一项的一种基于基可达图的多智能体最优任务分配与规划方法。
23、本发明还提供了一种基于基可达图的多智能体最优任务分配与规划系统,该系统包括:
24、petri网模型建立模块,用于根据多个智能体的工作地图信息构建多智能体工作空间petri网模型;
25、petri网模型约简模块,用于根据每个智能体的任务要求化约简多智能体工作空间petri网模型,得到约简petri网模型,其中任务要求指的是每个智能体需执行的任务;
26、控制库所添加模块,用于对约简petri网模型添加控制库所,并更新当前约简petri网模型;
27、基分区划分模块,用于根据任务要求确定更新后约简petri网模型的显式变迁和隐式变迁,并剔除当前约简petri网模型中隐式变迁集ti中构成循环部分,将剔除的隐式变迁划分为显式变迁,得到基分区;
28、可达图生成模块,用于根据基分区生成多智能体当前约简petri网模型的基可达图;
29、输出模块,用于筛选约简基可达图中满足终止任务要求的节点,并输出最优任务分配方案与最优规划路径。
30、本发明的有益效果是:本发明的技术方案首先剔除每个智能体基于任务要求在petri网模型中无关库所和无关变迁,相当于缩小了地图信息,只保留了每个智能体任务相关的地图信息,简化了多智能体工作空间petri网模型;在此基础上进一步基于当前任务要求,将变迁划分为显式变与隐式变迁,并根据这样的一组基分区生成petri网模型的基可达图,在该基可达图中搜索满足任务要求的最小成本终点状态;最后根据终点状态进行路径回溯,获取多智能体在工作环境中满足任务要求且具有最小成本的任务分配方式与移动轨迹。实现对当前问题解空间的进一步简化。
31、一方面,针对多智能体复杂任务最优任务分配与规划问题,本发明通过将多智能体建模为petri网系统,并根据任务要求对petri网系统进行约简,构建了约简petri网,约简petri网保留了全局关键信息;后续任务分配与规划基于该约简后petri网,减小了地图规模,提高计算效率。
32、另一方面,使用控制库所实现对复杂任务的约束,从而将复杂任务任务分配与规划问题转换为目标状态的可达性问题,并使用基可达图方法约简系统状态可达空间,从而在基可达图中进行状态搜索,极大程度减小了求解空间,进一步提升了计算效率且输出最优规划。
- 还没有人留言评论。精彩留言会获得点赞!