一种巡检路径规划中的线路识别规划方法及装置与流程
本发明涉及电力配网巡检,特别是涉及一种巡检路径规划中的线路识别规划方法及装置。
背景技术:
1、巡检路径规划是电力系统中重要的一环,它能够提高巡检效率、减少人力成本,并且保证巡检的全面性和准确性。传统的巡检路径规划方法主要依赖于人工经验。而工人巡检路径规划存在以下问题:首先,人工规划的效率低下,无法适应大规模电网的巡检需求。其次,由于电力线路复杂多变,人工规划容易出现遗漏和错误。最后,人工规划无法充分利用激光雷达等传感器数据,无法实现自动化和智能化。
技术实现思路
1、本发明所要解决的技术问题是:提供一种巡检路径规划中的线路识别规划方法及装置,实现自动化的巡检路径规划,提高电网巡检效率以及精度。
2、为了解决上述技术问题,本发明采用的技术方案为:
3、一种巡检路径规划中的线路识别规划方法,包括:
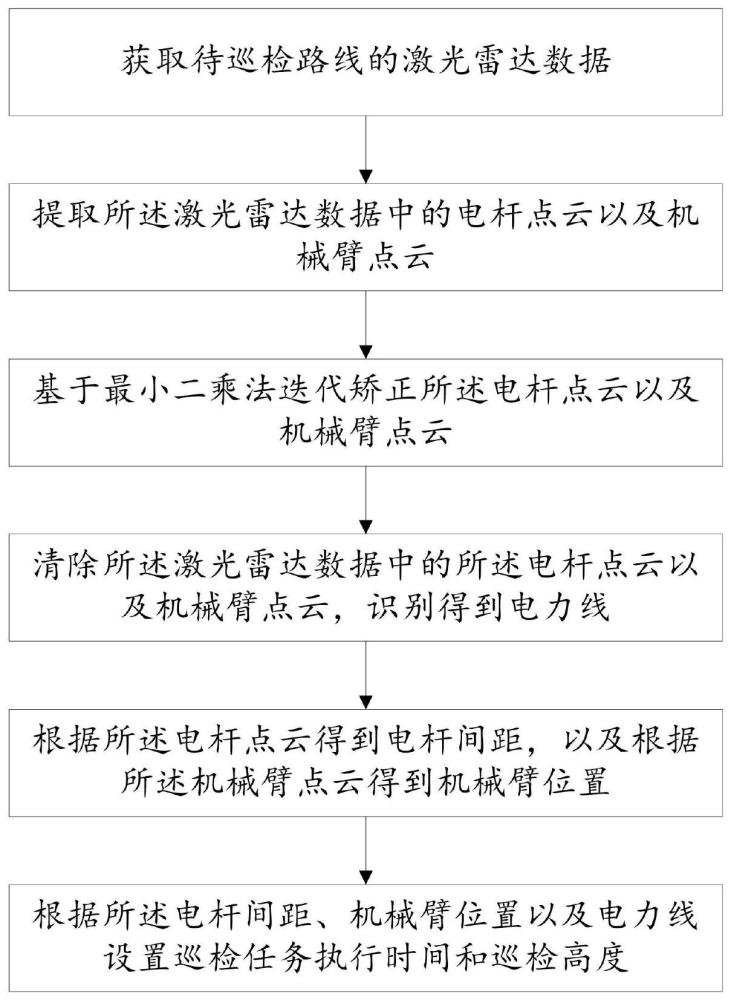
4、获取待巡检路线的激光雷达数据;
5、提取所述激光雷达数据中的电杆点云以及机械臂点云;
6、基于最小二乘法迭代矫正所述电杆点云以及机械臂点云;
7、清除所述激光雷达数据中的所述电杆点云以及机械臂点云,识别得到电力线;
8、根据所述电杆点云得到电杆间距,以及根据所述机械臂点云得到机械臂位置;
9、根据所述电杆间距、机械臂位置以及电力线设置巡检任务执行时间和巡检高度。
10、为了解决上述技术问题,本发明采用的另一技术方案为:
11、一种巡检路径规划中的线路识别规划装置,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述的一种线路识别规划方法中的各个步骤。
12、本发明的有益效果在于:在获取待巡检路线的激光雷达数据后,通过提取其中的电杆点云以及机械臂点云并基于最小二乘法迭代矫正,得到精确的电杆点云以及机械臂点云数据,再通过清除激光雷达数据中的电杆点云以及机械臂点云对其中的电力线进行识别,即能够从激光雷达数据提取出精确的电杆数据、机械臂数据以电力线数据,最终基于电杆数据、机械臂数据以电力线数据生成相应的巡检任务执行时间和巡检高度,实现自动化的巡检路径规划,提高电网巡检效率以及精度。
技术特征:
1.一种巡检路径规划中的线路识别规划方法,其特征在于,包括:
2.根据权利要求1所述的一种巡检路径规划中的线路识别规划方法,其特征在于,所述提取所述激光雷达数据中的电杆点云以及机械臂点云包括:
3.根据权利要求2所述的一种巡检路径规划中的线路识别规划方法,其特征在于,所述通过主成分分析计算所述电杆点云的特征向量主方向包括:
4.根据权利要求3所述的一种巡检路径规划中的线路识别规划方法,其特征在于,所述通过特征值分解计算所述分布矩阵的特征值以及所述特征值对应的特征向量包括:
5.根据权利要求1所述的一种巡检路径规划中的线路识别规划方法,其特征在于,所述基于最小二乘法迭代矫正所述电杆点云以及机械臂点云包括:
6.根据权利要求5所述的一种巡检路径规划中的线路识别规划方法,其特征在于,所述使用最小二乘法拟合所述电杆点云以及机械臂点云,分别得到电杆损失函数以及机械臂损失函数包括:
7.根据权利要求6所述的一种巡检路径规划中的线路识别规划方法,其特征在于,所述根据所述电杆平面主方向以及机械臂平面主方向分别确定电杆旋转矩阵以及机械臂旋转矩阵包括:
8.根据权利要求1所述的一种巡检路径规划中的线路识别规划方法,其特征在于,所述清除所述激光雷达数据中的所述电杆点云以及机械臂点云,识别得到电力线包括:
9.根据权利要求8所述的一种巡检路径规划中的线路识别规划方法,其特征在于,所述计算所述分割点云的直线度包括:
10.一种巡检路径规划中的线路识别规划装置,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1-9中任一项所述的一种巡检路径规划中的线路识别规划方法中的各个步骤。
技术总结
本发明公开一种巡检路径规划中的线路识别规划方法及装置,包括:获取待巡检路线的激光雷达数据;提取所述激光雷达数据中的电杆点云以及机械臂点云;基于最小二乘法迭代矫正所述电杆点云以及机械臂点云;清除所述激光雷达数据中的所述电杆点云以及机械臂点云,识别得到电力线;根据所述电杆点云得到电杆间距,以及根据所述机械臂点云得到机械臂位置;根据所述电杆间距、机械臂位置以及电力线设置巡检任务执行时间和巡检高度。即能够从激光雷达数据提取出精确的电杆数据、机械臂数据以电力线数据,最终基于电杆数据、机械臂数据以电力线数据生成相应的巡检任务执行时间和巡检高度,实现自动化的巡检路径规划,提高电网巡检效率以及精度。
技术研发人员:刘毅,林键炜,贺健伟,蔡柳晖,林碧云,陈佳文
受保护的技术使用者:福建省电力有限公司泉州电力技能研究院
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!