一种无人机辅助的通感一体化网络中目标三维定位方法
本发明涉及无人机,尤其是涉及一种无人机辅助的通感一体化网络中目标三维定位方法。
背景技术:
1、5g及以上的网络将推动新兴应用的发展,这些应用通常需要高通信速率、高精度定位。在同一应用中传感和通信使用不同的频谱和硬件设备,导致频谱资源浪费、设备功耗过大。为解决上述限制,引发了学术界、工业界对通感一体化系统的关注[1]。无人机辅助的通感一体化网络中无人机可以作为可移动的ap灵活调度至通信用户或感知目标周围,从而降低信号发射功率要求,增强网络性能。
2、以往的无人机通感一体化网络中,考虑静态网络,无人机在固定位置对目标定位,没有完全利用无人机机动性;动态无人机网络中对一个目标进行定位,没有考虑多个目标,效率较低;对传感目标的定位一般考虑利用测量距离估计,测量距离从测量回波延迟时间导出,存在转换噪声,不够准确;只考虑地面目标的二维坐标估计,这样的系统实用性不足、获取信息较少。
技术实现思路
1、本发明的目的是提供一种无人机辅助的通感一体化网络中目标三维定位方法,以至少解决现有技术中无人机辅助通感一体化网络中目标定位信息获取不足、目标定位效率低的技术问题。
2、本发明提供的一种无人机辅助的通感一体化网络中目标三维定位方法,包括以下步骤:
3、步骤1,建立多目标传感模型,导出目标探测回波接收信噪比,从而推导回波延迟时间测量模型;
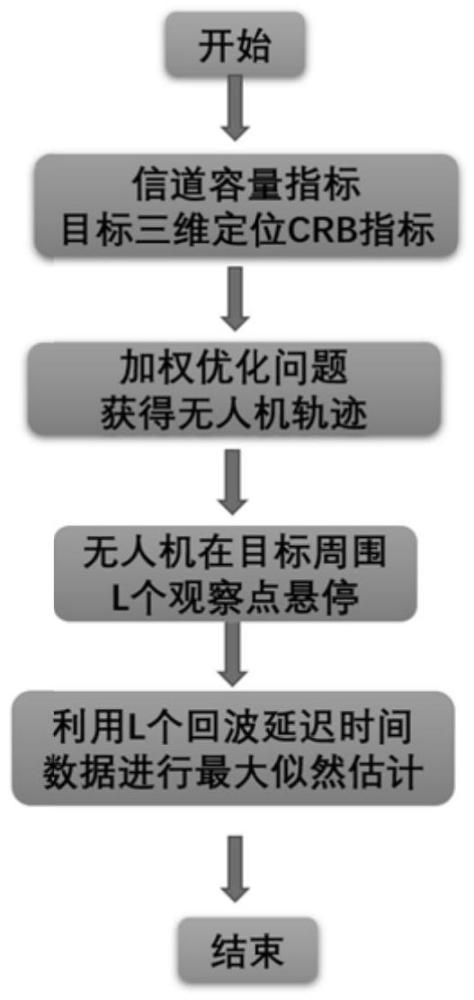
4、步骤2,根据所述回波延迟时间测量模型,导出信道容量指标、目标三维定位crb指标;
5、步骤3,解决加权优化问题,获得无人机飞行轨迹;
6、步骤4,获得目标三维坐标估计,实现目标的三维定位。
7、进一步的,所述步骤1包括如下步骤:
8、步骤101,根据无人机辅助的通感一体化网络,建立通信模型;
9、步骤102,利用无人机空对地信道模型导出信道容量指标;
10、步骤103,建立多目标传感模型,导出目标探测回波接收信噪比;
11、步骤104,推导回波延迟时间测量模型。
12、进一步的,所述无人机空对地信道模型为los链路和nlos链路结合构成的通信信道。
13、进一步的,所述回波延迟时间测量模型包括回波延迟时间的真实值、测量噪声,其中测量噪声呈高斯分布,均值为0,方差与回波接收信噪比成反比;
14、回波延迟时间的测量值表示为:
15、
16、τk(l)是回波延迟时间的真实值,wk(l)是测量噪声。
17、进一步的,所述步骤2包括如下步骤:
18、步骤201,利用回波延迟时间,导出回波延迟时间方差;
19、步骤202,利用回波延迟时间方差导出回波延迟时间fim,导出待估计坐标向量的fim;
20、步骤203,获得待估计目标三维定位crb指标。
21、进一步的,所述步骤202,利用回波延迟时间的方差和fim的关系求得回波延迟时间的fim,通过链式法则获取所述目标待估计坐标向量的fim;所述步骤203通过对待估计坐标向量的fim的逆求迹获得所述目标三维定位的crb。
22、进一步的,步骤3所述优化问题,是以加权归一化信道容量指标和三维坐标估计crb指标为目标函数,加上无人机约束;
23、所述约束包括:无人机能量;最大飞行速度;飞行、悬停、通信损耗的能量;电池容量。
24、进一步的,所述步骤4包括如下步骤:
25、步骤401,无人机在目标周围l个观察点悬停;
26、步骤402,利用l个回波延迟时间数据进行最大似然估计,获得目标所述三维坐标估计,进而实现目标的三维定位。
27、本发明的另一目的是提供一种目标定位系统,所述系统包括处理器以及与所述处理器连接的存储器;
28、其中,所述存储器用于存储程序数据;所述处理器用于运行所述程序数据,以执行一种无人机辅助的通感一体化网络中目标三维定位方法所述的方法。
29、本发明的另一目的是提供一种存储介质,所述存储介质存储有程序数据,所述程序数据被执行时实现如一种无人机辅助的通感一体化网络中目标三维定位方法所述的方法。
30、本发明解决现有无人机辅助通感一体化网络中目标定位信息获取不足,目标定位效率低的技术问题,有效实现无人机辅助的通感一体化网络中目标三维定位。
技术特征:
1.一种无人机辅助的通感一体化网络中目标三维定位方法,其特征在于,包括以下步骤:
2.根据权利要求1所述一种无人机辅助的通感一体化网络中目标三维定位方法,其特征在于,
3.根据权利要求2所述一种无人机辅助的通感一体化网络中目标三维定位方法,其特征在于,所述无人机空对地信道模型为los链路和nlos链路结合构成的通信信道。
4.根据权利要求3所述一种无人机辅助的通感一体化网络中目标三维定位方法,其特征在于,所述回波延迟时间测量模型包括回波延迟时间的真实值、测量噪声,其中测量噪声呈高斯分布,均值为0,方差与回波接收信噪比成反比;
5.根据权利要求4所述一种无人机辅助的通感一体化网络中目标三维定位方法,其特征在于,所述步骤2包括如下步骤:
6.根据权利要求5所述一种无人机辅助的通感一体化网络中目标三维定位方法,其特征在于,所述步骤202,利用回波延迟时间的方差和fim的关系求得回波延迟时间的fim,通过链式法则获取所述目标待估计坐标向量的fim;所述步骤203通过对待估计坐标向量的fim的逆求迹获得所述目标三维定位的crb。
7.根据权利要求6所述一种无人机辅助的通感一体化网络中目标三维定位方法,其特征在于,步骤3所述优化问题,是以加权归一化信道容量指标和三维坐标估计crb指标为目标函数,加上无人机约束;
8.根据权利要求7所述一种无人机辅助的通感一体化网络中目标三维定位方法,其特征在于,所述步骤4包括如下步骤:
9.一种目标定位系统,其特征在于,所述系统包括处理器以及与所述处理器连接的存储器;其中,所述存储器用于存储程序数据;所述处理器用于运行所述程序数据,以执行如权利要求1-8任一项所述的方法。
10.一种存储介质,其特征在于,所述存储介质存储有程序数据,所述程序数据被执行时实现如权利要求1-8任一项所述的方法。
技术总结
本发明公开一种无人机辅助的通感一体化网络中目标三维定位方法,根据无人机辅助的通感一体化网络,建立传感模型,制定多目标三维定位策略,利用无人机接收到的目标回波延迟时间估计目标的三维坐标,利用目标回波延迟时间的特性建立目标三维定位精度指标CRB的表达式,联合目标定位精度和通信速率规划无人机轨迹,本发明解决现有无人机辅助通感一体化网络中目标定位信息获取不足,目标定位效率低的技术问题,有效实现无人机辅助的通感一体化网络中目标三维定位,提高系统定位精度。
技术研发人员:骆春波,谷思艳,罗杨,谢骏涵,黄欣旸,闫龙程,孙文健,刘翔
受保护的技术使用者:电子科技大学长三角研究院(湖州)
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!