基于激光扫描的特征轮廓三维建模装置以及三维建模方法
本发明涉及计算机视觉,特别涉及一种基于激光扫描的特征轮廓三维建模装置以及三维建模方法。
背景技术:
1、常用的三维建模方法包含有基于计算机辅助设计建模、基于图像建模以及基于激光扫描的三维建模等;其中基于计算机辅助设计建模是通过手工测量目标物的尺寸数据,再利用软件进行人工建模的方法;其中基于图像建模是通过计算机算法对图像进行分析和处理来创建三维模型的方法;其中基于激光扫描的三维建模无需接触物体表面,通过测量发射激光束和接收反射激光束之间的时间和强度差异来获取物体表面的形状信息,容易受到人为干扰,导致建模结果不够精确,同时受到环境因素和设备误差的影响,使采集的数据存在噪点和孤立点,致使点云数据质量降低。
技术实现思路
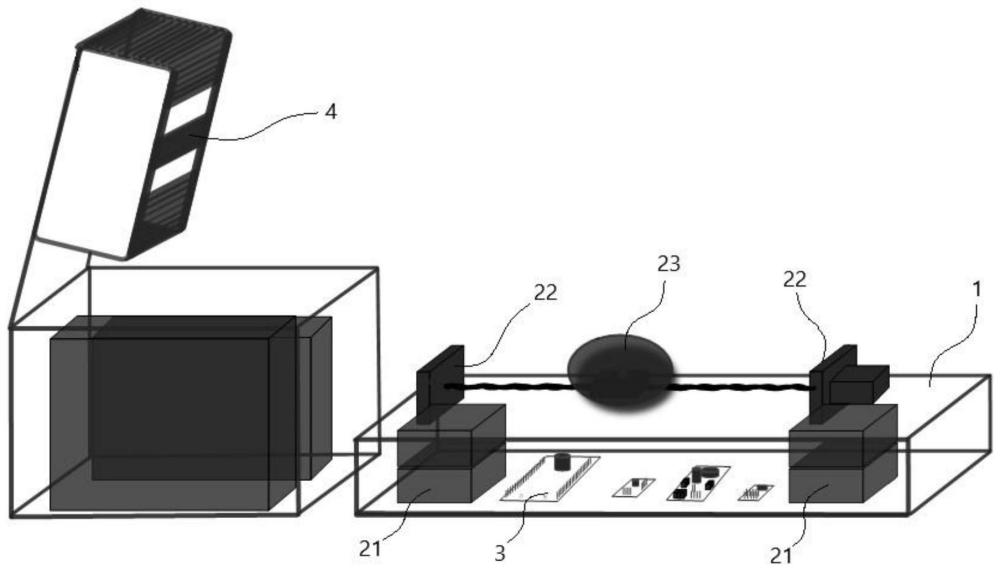
1、针对现有技术中存在的三维建模结果不够精确的技术问题,本发明的第一实施例提供了一种基于激光扫描特征轮廓的三维建模装置,其特征在于,包含:承载平台、位移模块、控制模块与激光采集装置;
2、位移模块设置在承载平台上,用于带动目标物进行位移;
3、控制模块设置在承载平台上,控制模块与位移模块电性连接,用于控制位移模块运行;
4、激光采集装置固定设置在承载平台的一侧,用于采集目标物的表面轮廓点云数据。
5、进一步,位移模块包含:一对支撑机构、水平位移机构与旋转平台;
6、一对支撑机构固定设置在承载平台上,用于消减震动;
7、水平位移机构设置在支撑机构上,用于带动目标物进行位移;
8、旋转平台设置在水平位移机构的执行端,目标物固定设置在旋转平台上,旋转平台用于带动目标物进行旋转。
9、本发明的第二实施例提出了一种基于激光扫描特征轮廓的三维建模方法,上述基于激光扫描特征轮廓的三维建模装置,包含如下步骤:
10、激光采集装置对目标物的表面轮廓进行激光扫描,获取目标物的表面轮廓点云数据;
11、初步处理表面轮廓点云数据,获得目标物的若干个局部轮廓面模型;
12、拼接处理若干个局部轮廓面模型,获得目标物的三维模型。
13、进一步,通过对不同视角下的若干个局部轮廓面模型添加权重,对若干个局部轮廓面模型进行拼接,获得三维模型。
14、进一步,初步处理表面轮廓点云数据,获得目标物的若干个局部轮廓面模型包含如下子步骤:
15、对表面轮廓点云数据进行高维空间映射,获得空间三维轮廓坐标点云数据;
16、对空间三维轮廓坐标点云数据进行三角划分,获得若干个空间三角网格;
17、平滑处理若干个空间三角网格,获得若干个局部轮廓面模型。
18、进一步,利用delaunay三角剖分对空间三维轮廓坐标点云数据进行三角划分,获得若干个三角网格。
19、进一步,基于无量纲半径规范平滑处理若干个三角网格,生成若干个三角面,即获得若干个局部轮廓面模型。
20、进一步,在对表面轮廓点云数据进行高维空间映射前,对表面轮廓点云数据进行去噪处理。
21、进一步,在对表面轮廓点云数据进行高维空间映射前,对表面轮廓点云数据进行坐标拉伸处理或坐标压缩处理,用于调整三维模型的表面轮廓形状以及三维模型的表面轮廓尺寸。
22、对目标物进行表面轮廓点云数据采集时,记激光测距仪扫描光线与物体表面分别相交于m、n两点,反射角度分别为,α、β,并在接收器端得到于m`、n`两点,夹角为γ,物体表面到接收器的距离为l,我们可以得到物体表面宽度w为:
23、
24、通过微控制器esp32、步进电机驱动电路l298n、减速电机驱动电路uln2003、激光测距仪lj-x8400、控制器lj-x8000a等材料基于三角测距法搭建激光扫描装置,利用亚克力板固定运动装置和采集装置,使激光扫描的激光束与物体运动夹角控制在15至45度之间,扫描范围保持在30至100厘米之间,从而实现对目标的不同方向和不同位置的测量,并利用支撑模块,降低水平运动平台震动产生的误差,提高扫描轮廓的精度。水平移动平台和旋转运动平台的芯片设备主要由微控制器esp32、双极晶体管驱动器l298n、步进电机驱动电路uln2003、多路输出dc-dc电压转化模块组成。esp32作为主控制器,通过烧录程序驱动各个模块,具有集成度高、性能稳定等优点;l298n作为步进电机的驱动模块,利用脉冲宽度调制技术改变输送电压,能够控制电机旋转速度,同时利用h桥供电控制输入电压的电极,控制电机的旋转方向;uln2003作为减速电机的驱动模块,具有极高的抗负载能,为减速电机提供充足的扭矩力;多路输出dc-dc电压转化模块将12v输入电压转换为多路输出,为其它芯片提供稳定的电压。
25、将采集到的目标轮廓点云集合进行去噪处理,并对轮廓点云进行坐标拉伸,通过将轮廓点集合按照某一轴向进行伸展和压缩,从而改变物体表面轮廓的形状和尺寸。设轮廓点云集合中任意点pi,进行拉伸操作后的新坐标采用拉伸前的点集合均值与标准差,拉伸后的坐标都有:
26、
27、其中,n是指定轴向下坐标值,代表当前坐标轮廓中标准差,n为指定轴向坐标值,δτ是拉伸长度的随机偏移量。
28、对拉伸后的轮廓坐标采用矩阵线性变换作为高维空间映射的方法,利用行进间点集合提取出当前轮廓的特征,用于分割当前轮廓所属层次。对于高维空间映射后的三维轮廓点云集合,利用降采样得到当前轮廓的三维点云数据。对于任意点p(χ,y,z)与点p(x1,y1,z1)、p(x2,y2,z2)的关系,由式(4)可得,得到当前轮廓的凸包表面ch:
29、
30、根据最小二乘法对包围盒box的尺寸和位置进行调整,由式(5)可得,通过最小化凸包上的点ch(xi,yi,zi)到包围盒最小距离的平方,不断缩小包围盒的包围尺寸,直到迭代结束,得到包围盒的尺寸和位置,作为轮廓凸包的最小包围盒boxmin。
31、mindis=min∑(chi-boxi)2 (4)
32、利用轮廓尺度切片,对三维轮廓凸包进行切割,为每条轮廓切片赋予thickness,确保每次切片处理后得到一组局部交叉的轮廓子集合,求取过程用式(6)表示:
33、
34、其中,zmax与zmin是最小包围盒boxmin中最大坐标点pmax(xmax,ymax,zmax)和最小坐标点pmin(xmin,ymin,zmin)进行z轴向的多轮切片,ncg代表轮廓分组数量,thickness代表切片厚度。
35、对局部三维轮廓切片添加厚度后,计算其空间三角形外接圆的半径及圆心坐标,基于投影方式判断当前点p(x,y,z)是否包含在三角形的外接圆中,由式(7)可判断p(x,y,z)与局部轮廓三角形外接圆的位置关系:
36、
37、其中,i、j、k代表不同轴向的单位向量。基于式(8),计算出当前三角形外接圆的半径如下式:
38、
39、其中,d表示空间中两点间的欧几里得距离。
40、将每组具有厚度的切片进行局部的delaunay三角化,通过拼接所有局部轮廓网格,保留各个局部三角网格相互交叉的部分,对退化的三角网格进行改进,将外接圆圆心新增到凸包点集合中,并重新生成轮廓表面网格。最终构建局部上、下表面轮廓点云。
41、对不同视角下测量的上、下表面轮廓点集合进行两阶段拼接,利用与
42、的协方差cov,由式(9)变换过程可得目标上、下表面轮廓点云集合,然后将上、下表面进行拼接,得到目标最终地三维轮廓。
43、
44、根据本发明实施例的基于激光扫描的特征轮廓三维建模装置以及三维建模方法,具备如下有益效果:本发明通过搭建基于激光扫描特征轮廓的三维建模装置对目标物自动进行激光扫描,采集目标物的表面轮廓点云数据,无需人工干扰,提高了数据的采集精度,降低了人为干扰产生的轮廓偏移;同时本发明极大程度地提高了表面模型化的生成速度,当需要多次采集时,只需要导出当前模型的轮廓点云集合,并重新测量目标物的轮廓,提高了三维建模的效率。
45、要理解的是,前面的一般描述和下面的详细描述两者都是示例性的,并且意图在于提供要求保护的技术的进一步说明。
- 还没有人留言评论。精彩留言会获得点赞!