一种飞机地面试验位姿主动控制装置及方法与流程
本申请属于全尺寸飞机静强度地面试验位姿控制技术,特别涉及一种飞机地面试验位姿主动控制装置及方法。
背景技术:
1、如图1所示,飞机在实际飞行过程中,需要对俯仰角、滚转角、偏航角进行控制,通过对飞机的升降舵、方向舵、副翼等形成闭环控制,操作各舵面的偏转实现对飞机的爬高、下滑、转弯的控制。然而,在飞机结构强度试验在实施过程中,飞机姿态的控制完全不能与空中姿态控制进行类比,飞机采用的支持方式对飞机姿态影响较大,试验中通常通过调整支持点位移,采用载荷监测手段对飞机姿态进行开环控制,控制精度各工况有一定的差异。传统飞机全机地面试验进行飞机姿态实时监测采用的是位移控制方法,试验过程中同时对支持点的支反力进行了监测。随着虚拟试验发展的需求,提出了一种基于神经网络的位移和角度双闭环控制的飞机地面试验位姿主动控制方法。
技术实现思路
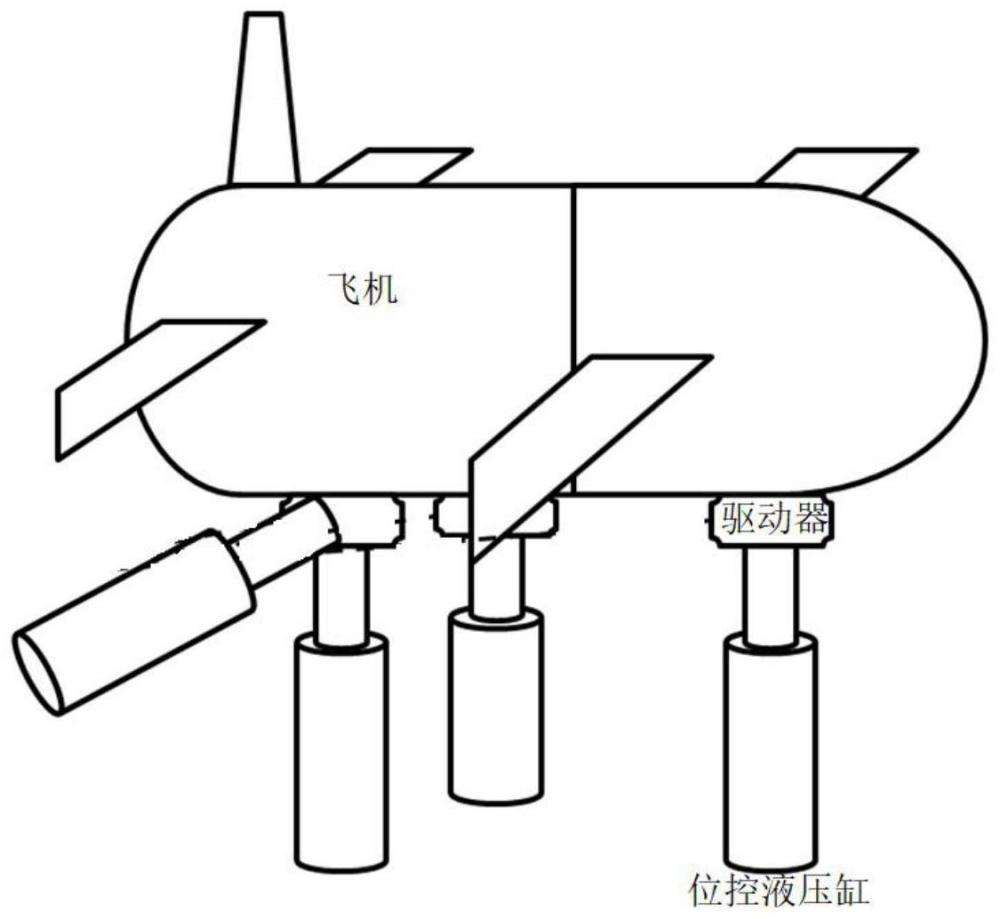
1、为了解决上述问题,本申请提供了一种飞机地面试验位姿主动控制装置,包括:
2、位控液压缸,包括分别安装在飞机各个起落架上的多个垂向的位控液压缸;
3、驱动器,分别安装在飞机各个起落架与位控液压缸之间;
4、位移传感器,分别安装在飞机各个起落架上,包括侧向的位移传感器以及多个垂向的位移传感器;
5、控制系统,分别连接位控液压缸、驱动器以及位移传感器。
6、一种飞机地面试验位姿主动控制方法,采用飞机地面试验位姿主动控制装置,所述方法包括:步骤s1:向控制系统输入位置指令;
7、步骤s2:通过控制系统获取位移传感器的位置信号,基于所述位置信息与所述初始位置指令控制位控液压缸作动使飞机位于预设位置;
8、步骤s3:对位于预设位置飞机进行加载试验,通过控制系统以及位移传感器获取因飞机受载产生的扰动位移信号;
9、当扰动位移信号属于第一区间时,控制系统基于扰动位移信号驱动驱动器使飞机保持预设位置;
10、当扰动位移信号属于第二区间时,控制系统基于扰动位移信号驱动位控液压缸使飞机保持预设位置。
11、所述扰动位移信号通过飞机受载后位移传感器的位置信号与飞机受载前位移传感器的位置信号作差得到。
12、优选的是,当扰动位移信号属于第一区间时,通过控制系统内置的神经网络模块将所述扰动位移信号换算成飞机位姿的扰动偏航角、扰动俯仰角和扰动滚转角,控制系统控制所述驱动器使所述扰动偏航角、扰动俯仰角和扰动滚转角趋近于0。
13、优选的是,当扰动位移信号大于预设值时,通过控制系统内置的神经网络模块将飞机受载前位移传感器的位置信号以及飞机受载后位移传感器的位置信号均换算成偏航角、俯仰角以及滚转角,并基于两者差值控制所述驱动器使飞机保持预设位置。
14、优选的是,当扰动位移信号属于第三区间时,将扰动位移信分为符合第一区间的第一扰动位移信号以及符合第二区间的第二扰动信号,控制系统同时基于第一扰动位移信号驱动六自由度,基于第二扰动位移信号驱动位控液压缸使飞机保持预设位置。
15、优选的是,第三区间大于第二区间,第二区间大于第一区间。
16、优选的是,可替换的是,步骤s3:对位于预设位置飞机进行加载试验,通过控制系统以及位移传感器获取因飞机受载产生的扰动位移信号;
17、当飞机受载小于预设值时,控制系统基于扰动位移信号驱动驱动器使飞机保持预设位置;
18、当飞机受载大于预设值时,控制系统基于扰动位移信号驱动位控液压缸使飞机保持预设位置。
19、优选的是,当飞机受载大于第二预设值时,第二预设值大于所述预设值,将扰动位移信分为第一扰动位移信号以及第二扰动信号,控制系统同时基于第一扰动位移信号驱动六自由度,基于第二扰动位移信号驱动位控液压缸使飞机保持预设位置。
20、一种飞机地面试验位姿主动控制方法,采用权利要求1所述的飞机地面试验位姿主动控制装置,其特征在于,所述方法包括:
21、步骤s1:向控制系统输入位置指令;
22、步骤s2:通过控制系统获取位移传感器的位置信号,基于所述位置信息与所述初始位置指令控制位控液压缸作动使飞机位于预设位置;
23、步骤s3:对位于预设位置飞机进行加载试验,通过控制系统以及位移传感器获取因飞机受载产生的扰动位移信号;
24、通过控制系统内置的神经网络模块将所述扰动位移信号换算成飞机位姿的扰动偏航角、扰动俯仰角和扰动滚转角,控制系统控制所述驱动器使所述扰动偏航角、扰动俯仰角和扰动滚转角趋近于0;同时控制系统基于扰动位移信号驱动位控液压缸使飞机保持预设位置。
25、本申请的优点包括:本申请双闭环控制对位置及角度的控制能力和精度取代了传统控制方法,通过神经网络实现自动计算偏航角、俯仰角和滚转角,大大提高了控制精度,系统扩展功能开放,可靠性高,尤其在大型飞机地面试验实施过程中对飞机姿态进行实时控制,提高飞机强度地面试验全机位姿控制精度本申请既能达到对飞机全机工况地面试验实施过程中飞机位姿的控制精度要求,又能实现对飞机全机工况试验过程中支反力的监测,并能对约束点支反力进行实时显示,用于提高飞机全机工况地面试验的位姿控制的准确性和稳定性。
技术特征:
1.一种飞机地面试验位姿主动控制装置,其特征在于,包括:
2.一种飞机地面试验位姿主动控制方法,采用权利要求1所述的飞机地面试验位姿主动控制装置,其特征在于,所述方法包括:
3.如权利要求1所述的飞机地面试验位姿主动控制装置,其特征在于,所述扰动位移信号通过飞机受载后位移传感器的位置信号与飞机受载前位移传感器的位置信号作差得到。
4.如权利要求1所述的飞机地面试验位姿主动控制装置,其特征在于,当扰动位移信号属于第一区间时,通过控制系统内置的神经网络模块将所述扰动位移信号换算成飞机位姿的扰动偏航角、扰动俯仰角和扰动滚转角,控制系统控制所述驱动器使所述扰动偏航角、扰动俯仰角和扰动滚转角趋近于0。
5.如权利要求1所述的飞机地面试验位姿主动控制装置,其特征在于,当扰动位移信号大于预设值时,通过控制系统内置的神经网络模块将飞机受载前位移传感器的位置信号以及飞机受载后位移传感器的位置信号均换算成偏航角、俯仰角以及滚转角,并基于两者差值控制所述驱动器使飞机保持预设位置。
6.如权利要求1所述的飞机地面试验位姿主动控制装置,其特征在于,当扰动位移信号属于第三区间时,将扰动位移信分为符合第一区间的第一扰动位移信号以及符合第二区间的第二扰动信号,控制系统同时基于第一扰动位移信号驱动六自由度,基于第二扰动位移信号驱动位控液压缸使飞机保持预设位置。
7.如权利要求6所述的飞机地面试验位姿主动控制装置,其特征在于,第三区间大于第二区间,第二区间大于第一区间。
8.如权利要求1所述的飞机地面试验位姿主动控制装置,其特征在于,可替换的是,步骤s3:对位于预设位置飞机进行加载试验,通过控制系统以及位移传感器获取因飞机受载产生的扰动位移信号;
9.如权利要求8所述的飞机地面试验位姿主动控制装置,其特征在于,当飞机受载大于第二预设值时,第二预设值大于所述预设值,将扰动位移信分为第一扰动位移信号以及第二扰动信号,控制系统同时基于第一扰动位移信号驱动六自由度,基于第二扰动位移信号驱动位控液压缸使飞机保持预设位置。
10.一种飞机地面试验位姿主动控制方法,采用权利要求1所述的飞机地面试验位姿主动控制装置,其特征在于,所述方法包括:
技术总结
本申请属于全尺寸飞机静强度地面试验位姿控制技术,特别涉及一种飞机地面试验位姿主动控制装置及方法,位控液压缸,包括分别安装在飞机各个起落架上的多个垂向的位控液压缸;驱动器,分别安装在飞机各个起落架与位控液压缸之间;位移传感器,分别安装在飞机各个起落架上,包括侧向的位移传感器以及多个垂向的位移传感器;控制系统,分别连接位控液压缸、驱动器以及位移传感器,控制时采用驱动器与位控液压缸分步或者同时控制的方式,是飞机姿态保持预设位置。
技术研发人员:韩涛,卢杰,聂小华,常亮,王立凯,张国凡,万春华,王海燕,罗利龙
受保护的技术使用者:中国飞机强度研究所
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!