一种测距方法、装置、设备、找平系统及工程机械与流程
本申请涉及工程机械控制,具体涉及一种测距方法、装置、设备、找平系统及工程机械。
背景技术:
1、设置有找平系统的工程机械在作业过程中,一般通过测距单元测量与找平面之间的距离,控制器将测距单元的测量距离作为找平距离,并以保证找平距离始终保持在一个固定值为目的,生成相应的控制指令,控制找平执行机构进行相应动作,从而达到找平效果。
2、然而,工程机械的部分组成部件在运行时会产生振动,带动工程机械在作业过程中上下振动,进而带动设置在工程机械上的测距单元上下振动,使得测距单元偏离平衡位置,且偏移量不断变化。若控制器仍以测距单元的测量距离作为找平距离进行找平控制,则会导致找平距离存在误差,进而影响找平系统的工作性能,降低工程机械的施工质量。
技术实现思路
1、有鉴于此,本申请提供了一种测距方法、装置、设备、找平系统及工程机械,能够对测距单元的测量距离进行补偿,减小找平距离的误差,提高找平系统的工作性能。
2、根据本申请实施例的第一方面,提供了一种测距方法,应用于设置有找平系统的工程机械,所述找平系统包括用于检测第一距离的测距单元,所述第一距离表示所述测距单元的当前位置与找平面之间的距离;
3、所述方法包括:
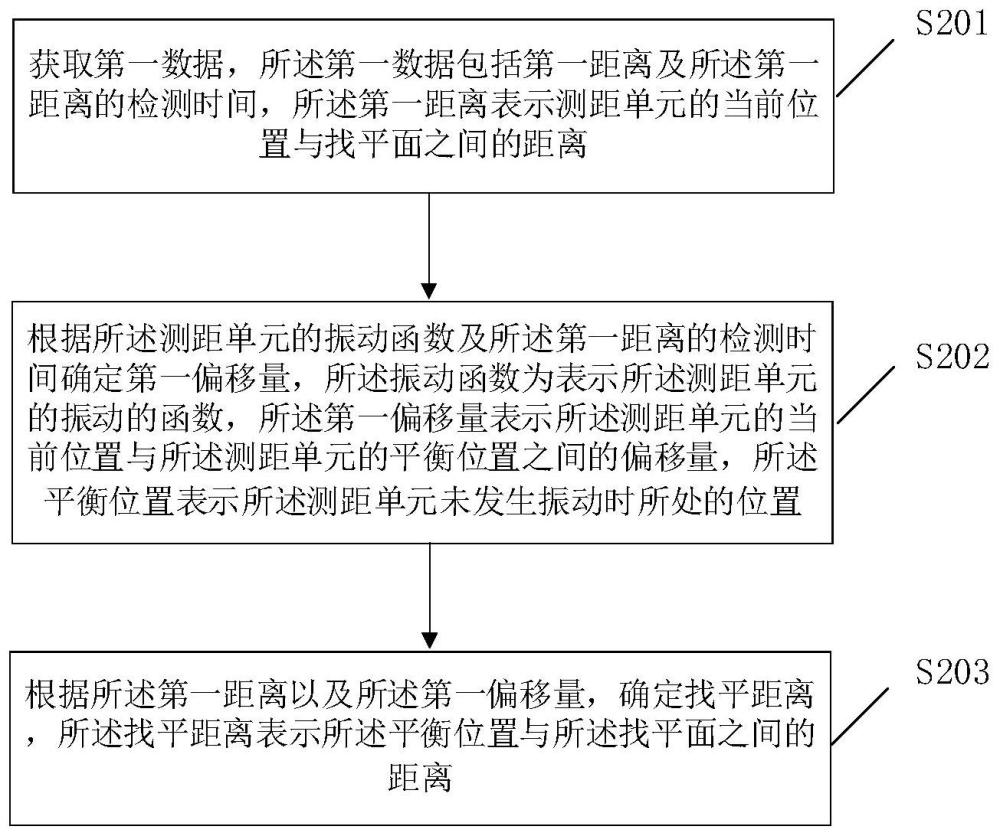
4、获取第一数据,所述第一数据包括所述第一距离及所述第一距离的检测时间;
5、根据所述测距单元的振动函数及所述第一距离的检测时间确定第一偏移量,所述振动函数为表示所述测距单元的振动的函数,所述第一偏移量表示所述测距单元的当前位置与所述测距单元的平衡位置之间的偏移量,所述平衡位置表示所述测距单元未发生振动时所处的位置;
6、根据所述第一距离以及所述第一偏移量,确定找平距离,所述找平距离表示所述平衡位置与所述找平面之间的距离。
7、可选的,所述方法还包括:
8、按照第一预设时间间隔周期性地获取第一数据集合,所述第一数据集合包括在所述第一预设时间间隔内获取到的多组所述第一数据;
9、基于预先设定的振动函数模型,对所述第一数据集合进行数据拟合,确定所述测距单元的所述振动函数。
10、可选的,所述找平系统包括至少两个测距单元;
11、所述获取第一数据集合,包括:
12、按照预设的分组方法对所述测距单元进行分组,得到至少两组测距单元;
13、获取所述每一组测距单元对应的所述第一数据集合;
14、所述基于预先设定的振动函数模型,对所述第一数据集合进行数据拟合,确定所述测距单元的所述振动函数,包括:
15、基于预先设定的振动函数模型,分别对所述每一组测距单元对应的所述第一数据集合进行数据拟合,确定所述每一组测距单元的第一振动函数;
16、根据所述每一组测距单元的所述第一振动函数,确定所述测距单元的所述振动函数。
17、可选的,所述振动函数中包括振幅及频率;
18、所述根据所述每一组测距单元的所述第一振动函数,确定所述测距单元的所述振动函数,包括:
19、获取所述每一组测距单元的所述第一振动函数的第一振幅值和第一频率值;
20、对所述第一振幅值进行处理,确定第二振幅值;
21、对所述第一频率值进行处理,确定第二频率值;
22、根据所述第二振幅值和所述第二频率值,确定所述测距单元的所述振动函数。
23、可选的,所述振动函数中包括振幅及频率;
24、所述基于预先设定的振动函数模型,对所述第一数据集合进行数据拟合,确定所述测距单元的所述振动函数,包括:
25、基于预先设定的振动函数模型,对所述第一数据集合进行数据拟合,确定至少两个第一候选振动函数;
26、在所述第一候选振动函数中,确定出满足第一预设频率阈值的振动函数,作为第二候选振动函数;
27、在所述第二候选振动函数中,确定出振幅最大的振动函数,作为所述测距单元的所述振动函数。
28、可选的,所述找平系统包括多个测距单元,所述多个测距单元按照预设的时序逻辑依次进行测距工作;
29、所述获取第一数据,包括:
30、获取当前时刻进行测距工作的测距单元检测的第一距离。
31、根据本申请实施例的第二方面,提供了一种测距装置,应用于设置有找平系统的工程机械,所述找平系统包括用于检测第一距离的测距单元,所述第一距离表示所述测距单元的当前位置与找平面之间的距离;
32、所述装置包括:
33、第一模块,用于获取第一数据,所述第一数据包括所述第一距离及所述第一距离的检测时间;
34、第二模块,用于根据所述测距单元的振动函数及所述第一距离的检测时间确定第一偏移量,所述振动函数为表示所述测距单元的振动的函数,所述第一偏移量表示所述测距单元的当前位置与所述测距单元的平衡位置之间的偏移量,所述平衡位置表示所述测距单元未发生振动时所处的位置;
35、第三模块,用于根据所述第一距离以及所述第一偏移量,确定找平距离,所述找平距离表示所述平衡位置与所述找平面之间的距离。
36、根据本申请实施例的第三方面,提供了一种测距设备,包括:
37、处理器,以及与所述处理器相连接的存储器;
38、所述存储器用于存储计算机程序;
39、所述处理器用于调用并执行所述存储器中的所述计算机程序,以执行如本申请实施例第一方面中任一项所述的测距方法。
40、根据本申请实施例的第四方面,提供了一种找平系统,包括:
41、测距单元以及如本申请实施例第三方面所述的测距设备;
42、所述测距单元用于检测第一距离,所述第一距离表示所述测距单元的当前位置与找平面之间的距离;
43、所述测距单元与所述测距设备通信连接。
44、根据本申请实施例的第五方面,提供了一种工程机械,包括:如本申请实施例第四方面所述的找平系统。
45、本申请提出的技术方案,获取第一数据,所述第一数据包括第一距离及所述第一距离的检测时间,所述第一距离表示测距单元的当前位置与找平面之间的距离;根据所述测距单元的振动函数及所述第一距离的检测时间确定第一偏移量,所述振动函数为表示所述测距单元的振动的函数,所述第一偏移量表示所述测距单元的当前位置与所述测距单元的平衡位置之间的偏移量,所述平衡位置表示所述测距单元未发生振动时所处的位置;根据所述第一距离以及所述第一偏移量,确定找平距离,所述找平距离表示所述平衡位置与所述找平面之间的距离。
46、本申请提出的技术方案,能够实时确定测距单元的当前位置与平衡位置之间的第一偏移量,并利用第一偏移量对测距单元检测的第一距离进行实时补偿,确定找平距离,从而减小因测距单元振动导致的找平距离误差,提高找平系统的工作性能,保障工程机械的施工质量。
技术特征:
1.一种测距方法,其特征在于,应用于设置有找平系统的工程机械,所述找平系统包括用于检测第一距离的测距单元,所述第一距离表示所述测距单元的当前位置与找平面之间的距离;
2.根据权利要求1所述的方法,其特征在于,所述方法还包括:
3.根据权利要求2所述的方法,其特征在于,所述找平系统包括至少两个测距单元;
4.根据权利要求3所述的方法,其特征在于,所述振动函数中包括振幅及频率;
5.根据权利要求2所述的方法,其特征在于,所述振动函数中包括振幅及频率;
6.根据权利要求1-5中任一项所述的方法,其特征在于,所述找平系统包括多个测距单元,所述多个测距单元按照预设的时序逻辑依次进行测距工作;
7.一种测距装置,其特征在于,应用于设置有找平系统的工程机械,所述找平系统包括用于检测第一距离的测距单元,所述第一距离表示所述测距单元的当前位置与找平面之间的距离;
8.一种测距设备,其特征在于,应用于设置有找平系统的工程机械,所述找平系统包括用于检测第一距离的测距单元,所述第一距离表示所述测距单元的当前位置与找平面之间的距离;
9.一种找平系统,其特征在于,包括:
10.一种工程机械,其特征在于,包括:如权利要求9所述的找平系统。
技术总结
本申请提供了一种测距方法、装置、设备、找平系统及工程机械,该方法包括:获取第一数据,所述第一数据包括第一距离及所述第一距离的检测时间,所述第一距离表示测距单元的当前位置与找平面之间的距离;根据测距单元的振动函数及所述第一距离的检测时间确定第一偏移量,所述第一偏移量表示所述测距单元的当前位置与所述测距单元的平衡位置之间的偏移量,所述平衡位置表示所述测距单元未发生振动时所处的位置;根据所述第一距离以及所述第一偏移量,确定找平距离,所述找平距离表示所述平衡位置与所述找平面之间的距离。本申请能够减小因测距单元振动导致的找平距离误差,提高找平系统的工作性能,保障工程机械的施工质量。
技术研发人员:夏元杰,刘超
受保护的技术使用者:湖南三一智能控制设备有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!