门架倾斜角度测量装置、运输车和方法与流程
本发明涉及物流运输车,具体涉及一种门架倾斜角度测量装置、运输车和方法。
背景技术:
1、物流运输车包括叉车、agv(自动导引运输车)等物流运输车辆,其属具部分主要包括门架和货叉,货叉能够在门架上升降,从而对物料进行举升或者放下,而门架与车体采用转动连接,使门架能够沿前后方向倾斜,便于对障碍进行避让。物流运输车主要承担了车间和工厂等场地物料运输工作,可能需要频繁的进出厂房门等具有坡道并且具有限高要求的场所。在经过坡道时,为了避免物料与坡道发生碰撞,一种方法是使运输车的货叉提升从而举升物料,然而,过度的举升物料容易使物料的上端与门体结构等高处障碍物发生碰撞,因此需要配合另一种方法,即调整门架的倾斜角度,从而使货叉尽可能与坡道平行,以减少需要举升物料的高度,避免与高处障碍发生碰撞,为了更精确的调整门架的倾斜角度,则需要对门架的角度进行测量。
2、在相关技术当中,对于门架角度的测量一般通过在车身固定安装角度放大器,从而将油缸的角度放大后测量,再经过计算从而获得门架倾斜的角度,或者通过在门架上安装陀螺仪,根据陀螺仪的加速度变化经过计算获得门架倾斜的角度。
3、然而在上述方法中,角度放大器结构复杂,与不同种类运输车的兼容性差,并且机械结构容易磨损导致精度下降,而陀螺仪的测量受到路面情况影响较大,并且只适用于静态测量,实时反馈的性能较差,并且可能会受到地理纬度的影响。
技术实现思路
1、有鉴于此,本发明提供了一种门架倾斜角度测量装置、运输车和方法,通过简单的结构和简单的计算方式获得门架倾斜的角度,使实时测量结果更准确可靠,并且不受地理纬度、路面倾斜情况等问题的影响。
2、第一方面,本发明提供了一种门架倾斜角度测量装置,包括:测距传感器,设于运输车的车体上并位于车体朝向运输车门架的一侧,所述测距传感器的测量端朝向门架方向,所述测距传感器的测量点的位置随着门架的俯仰角度变化而具有第一极限位置和第二极限位置;基准靶,设于门架上,所述第一极限位置、所述第二极限位置和两者之间的任意一点均位于所述基准靶上;计算单元,与所述测距传感器电连接,适于接收测距传感器的测量结果并进行计算处理,输出门架的倾斜角度。
3、有益效果:通过设置测距传感器设置在车体的前侧,并通过基准靶设置在门架上作为被测量目标,使测距传感器能够快速的测量出测距传感器与门架上被测量点之间的距离,并且当基准靶与测距传感器安装完毕后,测距传感器与门架转轴之间的距离、测量方向直线与测距传感器和门架转轴之间连线的夹角均为确定的已知数值,通过以测距传感器、基准靶上的测量点和距离门架转轴上距离测距传感器最近点位置的三点之间建立三角形,通过三角函数公式获得三角形底角的实时角度,再通过三角形底角实时角度与运输车在平地状态下底角角度对比,从而获得门架与竖直方向之间的角度。测量结构整体对机械结构依赖很少,杜绝了机械结构磨损对测量精度的影响,同时测量结构组成十分简单,成本很低,并且很容易在已有的运输车辆上加装测量结构,便于对现有运输车的改造,具有良好的实用性和便利性,另外,由于所需测量数据比较单一,进一步减小了测量结果受到外界影响的可能性,提升了测量结构可靠性。
4、在一种可选的实施方式中,所述测距传感器包括激光测距传感器、红外测距传感器、超声波传感器、光电测距传感器和拉线编码器中的任一种或多种的组合。
5、有益效果:由于能够获得与基准靶之间的距离数据即可完成整个测量过程,因此可使用的测距传感器种类十分广泛,使测量装置具有很强的适应性,可以适应各种场合的工作。
6、在一种可选的实施方式中,所述测距传感器为激光测距传感器,所述基准靶为反射板。
7、有益效果:激光测距传感器的精度较高,测量速度较快,并且反射板为激光测距传感器提供了精准、清晰的反射点,使测量装置能够精准、快速的获得所测量数据。
8、在一种可选的实施方式中,所述测距传感器设于车体朝向门架一侧的顶部,并且位于车体宽度方向上的中部位置。
9、有益效果:由于测距传感器设置在车体宽度方向的中部,并且位于顶部,从而加长了所建立三角形模型的边长,进一步降低了测量误差对计算结果的影响,提升了计算精度。
10、在一种可选的实施方式中,所述测距传感器与所述基准靶的安装高度相同,所述测距传感器的测量方向与车体平行。
11、有益效果:通过使测量方向与车体平行,使装置安装完成后对所需要测量的测距传感器至门架转轴的连线的长度、连线与测量方向之间的夹角数据更容易测量,从而减少测量误差,提升测量精度。
12、在一种可选的实施方式中,所述计算单元包括相互电连接的控制模块和计算模块,所述控制模块适于接收所述测距传感器的测量数据并发送至所述计算模块,以及接收所述计算模块的计算结果并发送至其他单元,所述控制模块包括电控箱,所述电控箱设于车体上并位于车体远离门架的一侧。
13、有益效果:控制模块和计算模块的交互实现了测量数据的处理和计算,并通过控制模块将计算结果发送至运输车计算机或者数显单元等其他单元处,电控箱设置与车体远离门架的一侧,从而减少了电控箱与货物发生碰撞而发生故障的可能性,提升了结构可靠性。
14、第二方面,本发明还提供了一种运输车,包括:包括车体;门架,设于所述车体前侧且与所述车体通过转轴转动连接;驱动装置,设于所述车体上并与所述门架连接,适于驱动所述门架绕所述转轴进行俯仰方向的转动;上述的门架倾斜角度测量装置,设于所述车体和所述门架上。
15、有益效果:由于门架倾斜角度测量装置结构简单,并且成本低、安装容易,可以对现有的运输车进行改造,同时,所需要的测量数据量单一,使测量结果高度可靠,使运输车能够迅速的测量出门架倾斜角度并且根据门架倾斜角度对运输车姿态进行调整,反馈调节响应迅速。并且,由于所需要的测距传感器可选种类较多,使运输车能够适应不同的应用场景。
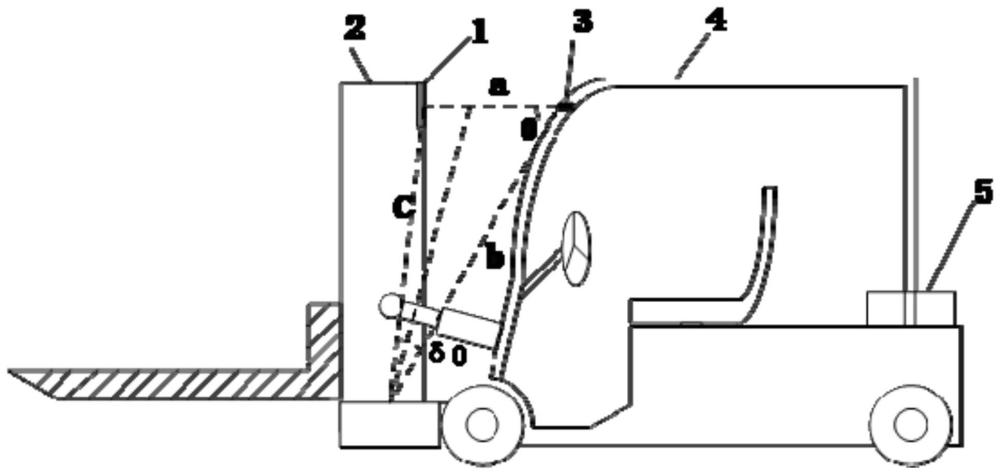
16、第三方面,本发明还提供了一种门架倾斜角度测量方法,应用于上述的一种运输车;安装所述测距传感器和所述基准靶,并使所述测距传感器和所述基准靶在所述车体宽度方向上的同一位置相对设置;
17、测量获得所述测距传感器与所述门架转轴之间的最短距离记为b,测量所述测距传感器至所述测量点之间连线与所述测距传感器至所述门架转轴与所述测距传感器最近点的连线之间的夹角记为θ,将b和θ的数值预制于所述计算单元中;
18、所述测距传感器的测量值为所述测量点与所述测距传感器之间的距离记为a,所述测距传感器将a的数值发送至所述计算单元;
19、所述测量点与所述门架转轴的最短距离记为c,所述门架转轴至所述测量点的连线与所述门架转轴至所述测距传感器的连线之间的夹角记为δ,通过所述计算单元根据公式计算获得c的数值,并根据公式δ=arc((b2-abcosθ)/bc)计算获得δ的数值;
20、将运输车置于平地,调整所述门架垂直于地面,并根据此时测距传感器3的测量值a带入上述公式计算此时δ的数值并记为δ0,将δ0预制在计算单元中;
21、将所述门架的倾斜角度记为β,所述计算单元根据公式β=δ0-δ计算的出β的数值。
22、需要说明的是,当β的数值为正时门架处于后仰的仰角状态,当β的数值为负时门架处于前倾的俯角状态。
23、有益效果:所需测量的数据仅为一个长度数据,其余工作通过计算单元根据简单的公式可以快速的测算出来,整个测算过程十分迅速,并且计算公式所需的已知定量获得容易,使计算结果高度可靠。
24、在一种可选的实施方式中,还包括以下步骤:根据所选运输车型号获得所述门架俯仰角度的最大值和最小值,分别记为β1和β2,根据公式δ=β-δ0计算得出当β=β1和β=β2时δ的数值,分别记为δ1和δ2;
25、根据公式c=(b2-2abcosθ)/δ分别计算出当δ=δ1和δ=δ2时c的数值,分别记为c1和c2;
26、记基准靶的最小长度为l,根据公式l=|1-c2|计算出l的最小值。
27、有益效果:通过计算公式可以反推出基准靶的最小长度,从而可以根据计算结果来选用可选范围内最小尺寸的基准靶,避免基准靶与运输车上其他结构发生干涉的情况,并且避免人工驾驶型运输车上基准靶对驾驶员视线的遮挡。
28、在一种可选的实施方式中,在所述运输车为自动运输车的情况下,所述计算单元与自动运输车的计算机电连接,并向所述计算机发送计算出的β数值,所述计算机将β与路面倾斜角度对比,并根据对比结果控制所述驱动装置调整所述门架的角度。
29、有益效果:在自动运输车上,通过将门架倾斜角度的计算结果传递给运输车计算机,再通过计算机根据获得地面坡度快速调整门架,并继续根据门架倾斜角度的实时反馈做出实时调整,提升了自动运输车的工作效率。
- 还没有人留言评论。精彩留言会获得点赞!