一种巡检机器人在无GNSS隧道环境下的自主定位方法与流程
本发明涉及导航定位,具体来说,涉及一种巡检机器人在无gnss隧道环境下的自主定位方法。
背景技术:
1、近年来,随着城市轨道交通的快速发展,大量城市已经进入了网络化运营阶段。这带来了日益增长的设备监测和日常巡检任务,尤其是地铁隧道内的设备巡检,由于线路里程长、隧道环境复杂等特点,成为日常运维中的一大难点。因此,迫切需要采用自动化手段来提高巡检和运维效率。目前,地铁轨旁设备和设施、轨道以及信号的监测主要依赖人工静态检查,辅以少量的动态监测。这种方式存在许多问题,如检查速度慢、耗时长、数据采集和整合效率低等。为应对这些挑战,巡检机器人应运而生,这种无人智能巡检机器人集多功能于一体,通过车身搭载的各类传感设备,能够对地铁轨旁或隧道内的设备设施、线缆、管道以及无线网络等进行全方位的多维数据采集。
2、目前,在巡检机器人的应用过程中,尤其在无全球导航卫星系统gnss(globalnavigation satellite system)的隧道环境下中,巡检机器人在作业效率和定位精度方面存在明显的不足,在无gnss的隧道环境中,巡检机器人尝尝依赖于车轮转速和里程计进行定位,但是这种方法往往准确度不高,因为车轮滑动、地面材质变化等因素都可能影响其准确性,从而会导致在无gnss的隧道环境下,巡检机器人的定位不够精确,进而影响其作业效率和任务完成的质量。
3、针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现思路
1、针对相关技术中的问题,本发明提出一种巡检机器人在无gnss隧道环境下的自主定位方法,以克服现有相关技术所存在的上述技术问题。
2、为此,本发明采用的具体技术方案如下:
3、一种巡检机器人在无gnss隧道环境下的自主定位方法,该巡检机器人在无gnss隧道环境下的自主定位方法包括以下步骤:
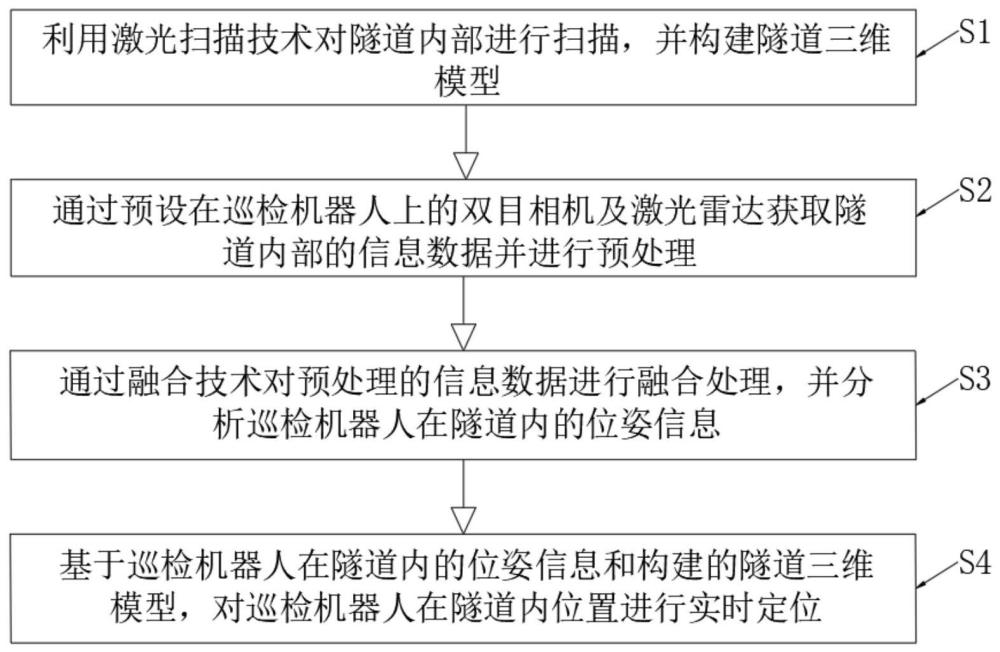
4、s1、利用激光扫描技术对隧道内部进行扫描,并构建隧道三维模型;
5、s2、通过预设在巡检机器人上的双目相机及激光雷达获取隧道内部的信息数据并进行预处理;
6、s3、通过融合技术对预处理的信息数据进行融合处理,并分析巡检机器人在隧道内的位姿信息;
7、s4、基于巡检机器人在隧道内的位姿信息和构建的隧道三维模型,对巡检机器人在隧道内位置进行实时定位。
8、优选的,利用激光扫描技术对隧道内部进行扫描,并构建隧道三维模型包括以下步骤:
9、s11、通过三维激光扫描仪对隧道的内部进行初始点云数据采集;
10、s12、对采集的初始点云数据进行点云数据去噪、数据拼接及坐标系转换处理;
11、s13、利用聚类方法对处理后的初始点云数据进行点云分类提取;
12、s14、根据分类提取的初始点云数据构建隧道的三维模型。
13、优选的,通过预设在巡检机器人上的双目相机及激光雷达获取隧道内部的信息数据并进行预处理包括以下步骤:
14、s21、通过双目相机和激光雷达分别获取隧道内部的图像数据和实时点云数据;
15、s22、利用图像增强技术对隧道内部的图像数据进行增强处理并提取特征点;
16、s23、将提取的特征点与实时点云数据中的数据点进行特征匹配,并建立点对关系。
17、优选的,利用图像增强技术对隧道内部的图像数据进行增强处理并提取特征点包括以下步骤:
18、s221、对隧道内部的图像数据进行不同尺度的降采样处理,并构建图像金字塔结构;
19、s222、从图像金字塔结构的顶层开始,利用ace算法对每个尺度的图像进行增强处理,并在增强处理过程中,根据图像金字塔结构在不同尺度上进行缩小和放大的操作,得到增强后的图像数据;
20、s223、通过orb特征点法从增强后的图像中提取特征点。
21、优选的,将提取的特征点与实时点云数据中的数据点进行特征匹配,并建立点对关系包括以下步骤:
22、s231、将激光雷达采集的实时点云数据统一到双目相机的坐标系下;
23、s232、利用迭代最近点算法将实时点云数据与提取的特征点进行匹配和配准,得到激光雷达在相机坐标系下的运动估计;
24、s233、通过匹配点对,建立实时点云数据和图像数据之间的点对关系。
25、优选的,利用迭代最近点算法将实时点云数据与提取的特征点进行匹配和配准,得到激光雷达在相机坐标系下的运动估计包括以下步骤:
26、s2321、初始化激光雷达和双目相机之间的初始变换矩阵;
27、s2322、对于实时点云数据中的每个数据点,通过最近邻搜索法找到图像数据中对应的特征点;
28、s2323、将找到的对应特征点与实时点云数据中的数据点进行点云配准,并根据配准结果更新变换矩阵;
29、s2324、判断是否满足预设的迭代次数,若不满足,则返回步骤s2322,否则,则根据更新后换矩阵将实时点云数据中的数据点变换到相机坐标下,得到激光雷达的运动估计。
30、优选的,通过融合技术对预处理的信息数据进行融合处理,并分析巡检机器人在隧道内的位姿信息包括以下步骤:
31、s31、基于实时点云数据和图像数据之间的点对关系,通过n点透视投影方法估计双目相机的运动;
32、s32、对双目相机运动的估计和激光雷达运动的估计进行融合处理,得到融合后的运动信息;
33、s33、对融合后的运动信息进行分析,确定巡检机器人在隧道内的位姿信息,位姿信息包括巡检机器人的朝向、位置及速度。
34、优选的,基于实时点云数据和图像数据之间的点对关系,通过n点透视投影方法估计双目相机的运动包括以下步骤:
35、s311、基于实时点云数据和图像数据之间的点对关系,选取预设数量的匹配点对,匹配点对包括实时点云数据中的数据点及其在图像数据中的对应点;
36、s312、对选取的每个点对,基于双目相机的属性信息并利用透视投影模型计算双目相机的初步参数;
37、s313、利用非线性最小二乘法对得到的双目相机的初步参数进行优化,得到双目相机的最终运动估计。
38、优选的,透视投影模型的表达式为:
39、sipi=ki[ri]hi;
40、式中,si表示尺度因子;
41、ki表示双目相机的内参矩阵;
42、[ri|ti]表示双目相机的外参矩阵;
43、hi表示实时点云数据中数据点的三维坐标点;
44、pi表示实时点云数据中数据点对应在图像数据中的二维坐标点。
45、优选的,基于巡检机器人在隧道内的位姿信息和构建的隧道三维模型,对巡检机器人在隧道内位置进行实时定位包括以下步骤:
46、s41、基于巡检机器人在隧道内的位姿信息,将将机器人的局部坐标系与隧道的全局坐标系对齐;
47、s42、获取的实时数据,并更新机器人的位姿信息;
48、s43、将实时获取的巡检机器人位置与隧道三维模型进行匹配;
49、s44、基于匹配结果,确定巡检机器人在隧道内的实时定位信息。
50、本发明的有益效果为:
51、1、本发明通过利用激光扫描技术,能够获取高精度的隧道三维模型,能够为后续的定位提供了可靠的参考基础,有助于提高定位的准确性,通过双目相机和激光雷达获取的信息进行融合处理,能够综合利用不同传感器的优势,可以提高定位方法的鲁棒性和准确性,同时,巡检机器人能够自主地获取、处理和分析传感器数据,进行实时定位,减少对外部gnss的依赖,提高了机器人在无人监控环境下的自主性。
52、2、本发明通过结合双目相机和激光雷达的数据,可以得到更加精确的环境信息,通过不同尺度的降采样和ace算法增强,可以有效提高图像数据中特征点的可识别性,通过将点云数据映射到相机坐标系,并与图像特征点进行配准,可以更准确地估计机器人在隧道内的运动。
53、3、本发明通过融合双目相机和激光雷达的数据,能够更准确地估计机器人的位姿,尤其在复杂的隧道环境中,而准确的位姿信息对于机器人的导航和路径规划至关重要,尤其是在隧道这样的限制性空间内,从而确保机器人在隧道内安全地导航,避免碰撞和其他潜在风险。
- 还没有人留言评论。精彩留言会获得点赞!