基于多传感器融合的高精度定位方法、设备及存储介质与流程
本技术涉及人工智能,尤其是涉及基于多传感器融合的高精度定位方法、设备及存储介质。
背景技术:
1、全球定位系统(gps)是最常见的导航方案之一,全球定位系统(gps)用于提供车辆的位置和速度信息,如此可以实现对车辆位置和运动状态的估计。
2、然而,gps定位的精度较低,在gps信号较强、没有遮挡的开阔领域,如农田、开阔的路面等场景,gps定位能够提供的精度通常有几米到十几米,而当gps信号收到遮挡、多路径效应和信号干扰等因素的影响时,gps定位的精度会下降,这就会影响最终得到的定位结果的精度。
技术实现思路
1、为了有助于提高定位结果的精度,本技术提供了基于多传感器融合的高精度定位方法、设备及存储介质。
2、第一方面,本技术提供一种基于多传感器融合的高精度定位方法,采用如下的技术方案:
3、一种基于多传感器融合的高精度定位方法,所述方法包括:
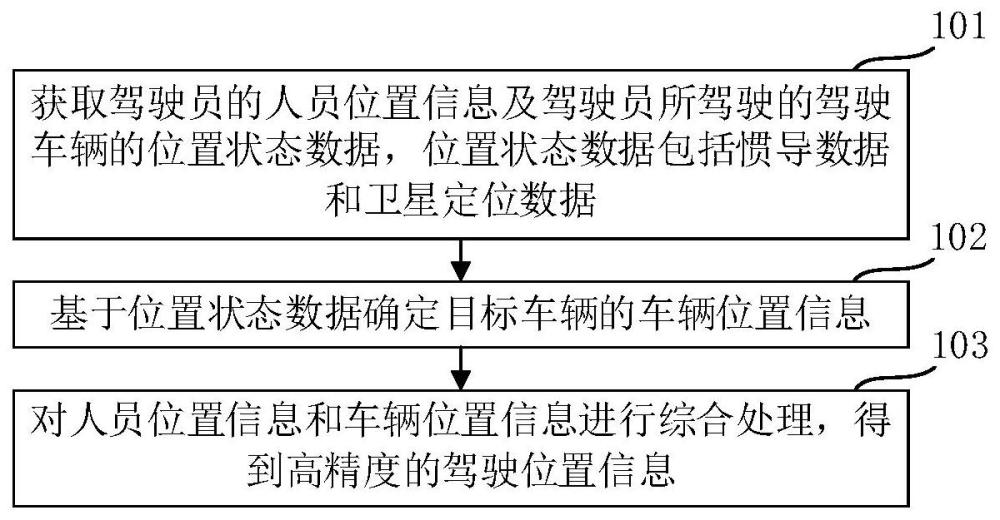
4、获取驾驶员的人员位置信息及驾驶员所述驾驶的驾驶车辆的位置状态数据,所述位置状态数据包括惯导数据和卫星定位数据;
5、基于所述位置状态数据确定目标车辆的车辆位置信息,所述目标车辆包括驾驶车辆和\或所述驾驶车辆设定范围内的车辆;
6、对所述人员位置信息和所述车辆位置信息进行融合处理,得到高精度的驾驶位置信息。
7、通过采用上述技术方案,由于驾驶车辆的位置状态数据包括惯导数据和卫星定位数据,如此可以结合惯导数据确定目标车辆的位置信息,从而可以有助于降低卫星定位精度低且不稳定的问题对车辆定位结果的影响,进而可以有助于提高确定出的驾驶位置信息的准确性。
8、可选的,所述车辆位置信息包括所述驾驶车辆对应的驾驶车辆位置,所述基于所述位置状态数据确定目标车辆的车辆位置信息,包括:
9、确定是否采用所述卫星定位数据进行定位;
10、在确定采用所述卫星定位数据进行定位的情况下,通过卡尔曼增益方程对前一预测不确定度进行计算,得到卡尔曼增益,所述前一不预测确定度为上一次确定出的预测不确定度;
11、基于所述卡尔曼增益、所述卫星定位数据、前一预测状态和卫星误差状态更新方程确定当前估计状态,所述当前估计状态包括驾驶车辆位置,所述卫星误差状态更新方程预先设置,所述前一预测状态是结合上一次获取的惯导数据预先确定的;
12、基于所述卡尔曼增益、所述前一预测不确定度和误差状态协方差更新方程确定估计不确定度,所述误差状态协方差更新方程预先设置,所述前一不确定度是结合上一次确定出的估计不确定度确定的。
13、通过采用上述技术方案,可以在结合卫星定位数据进行定位之前,需要先判断是否采用卫星定位数据进行定位,并在卫星定位数据具有一定可靠性的情况下,才结合卫星定位数据进行定位,如此可以有助于避免误差较大的卫星定位数据对最终定位结果的影响,进而可以有助于提高定位结果的精度。
14、可选的,所述位置状态数据还包括uwb定位数据,所述确定是否采用所述卫星定位数据进行定位之后,还包括:
15、在确定出不采用卫星定位数据进行定位的情况下,通过卡尔曼增益方程对所述前一预测不确定度进行计算,得到卡尔曼增益;
16、基于所述卡尔曼增益、所述uwb定位数据、所述前一预测状态和uwb误差状态更新方程确定所述当前估计状态,所述uwb误差状态更新方程预先设置;
17、基于所述卡尔曼增益、所述前一预测不确定度和误差状态协方差更新方程确定估计不确定度。
18、通过采用上述技术方案,由于在确定不使用卫星定位的情况下可以结合卡尔曼增益、本次采集的uwb定位数据和前一预测状态进行误差更新,从而得到驾驶车辆的估计位置,如此可以有助于提高最终确定出的定位结果的准确性。
19、可选的,所述通过卡尔曼增益方程对前一预测不确定度进行计算,得到卡尔曼增益之前,还包括:
20、将所述惯导数据指示的位置和所述卫星定位数据指示的位置输入预先设置的卫星位置误差观测方程,得到卫星位置观测误差;
21、将所述惯导数据指示的速度和所述卫星定位数据指示的速度输入预先设置的卫星速度误差观测方程,得到卫星速度观测误差;
22、基于所述卫星位置观测误差和所述卫星速度观测误差对所述卡尔曼增益方程中的测量不确定度进行调整,以使用调整后的卡尔曼增益方程计算卡尔曼增益。
23、通过采用上述技术方案,可以结合实时观测得到的卫星位置观测误差和卫星速度观测误差对卡尔曼增益中的测量不确定度进行调整,从而可以有助于结合卫星定位数据的实际情况对卡尔曼增益进行调整,进而可以有助于提高结合卡尔曼增益估算得到的驾驶车辆当前估计状态的准确性。
24、可选的,所述确定出当前估计状态之后,还包括:
25、基于所述惯导数据、所述当前估计状态和误差状态外推方程确定预测状态,所述误差状态外推方程是对所述驾驶车辆的惯导系统进行建模得到的,所述惯导数据由所述惯导系统采集;基于所述估计不确定度和误差状态协方差外推方程确定预测不确定度,所述误差协方差更新方程预先设置。
26、通过采用上述技术方案,可以结合惯导数据和当前估计状态进行误差状态外推得到预测状态,如此可以有助于提高确定出的预测状态的准确性,进而可以有助于提高下一次计算出的预估位置的准确性。
27、可选的,所述误差状态外推方程是结合所述惯导系统的姿态误差模型、速度误差模型、位置误差模型和传感误差模型构建。
28、通过采用上述技术方案,可以使得在通过误差外推方程进行误差外推的过程中可以考虑到不同维度的误差对状态预测结果的影响,进而可以有助于提高状态预测结果的准确性。
29、可选的,所述误差状态外推方程是基于所述惯导系统的系统误差向量构建的,所述系统误差向量通过下式表示:
30、δx=[δrn δvn φ bg ba sg sa]
31、其中,δx表示所述系统误差向量,δrn为所述惯导系统的位置误差向量,δvn为所述惯导系统的速度误差向量,φ为所述惯导系统的姿态误差向量,bg为所述惯导系统中的三轴陀螺仪零偏向量,ba为所述惯导系统中的三轴加速度计零偏向量,sg为所述三轴陀螺仪比例因子误差向量,sa为所述三轴加速度计比例因子误差向量。
32、可选的,所述误差状态外推方程通过下式表示:
33、δxk=φk,k-1δxk-1+ωk-1
34、其中,
35、
36、
37、δxk为所述预测状态,φk,k-1为状态转移矩阵,δxk-1为所述当前估计状态,ωk-1为系统高斯白噪声ω(t)的线性变换,f(t)为系统矩阵,g(t)为输入方程。
38、可选的,所述ωk-1满足ωk~n(0,qk),所述qk为系统状态噪声协方差矩阵,所述qk通过下式计算:
39、
40、其中,q(t)为常值矩阵,与所述传感误差模型相关。
41、通过采用上述技术方案,可以结合传感器误差模型确定系统状态噪声协方差矩阵,进而可以有助于提高最终预测结果的准确性。
42、可选的,所述方法还包括:
43、在未获取到所述人员位置信息的情况下,结合第三方云平台提供的第三方定位信息和所述车辆位置信息确定所述驾驶位置信息。
44、通过采用上述技术方案,可以在为获取到人员位置信息的情况下,结合第三方云平台提供的定位信息和车辆位置确定驾驶位置信息,如此可以有助于确保驾驶位置信息的准确性。
45、第二方面,本技术还提供一种电子设备,采用如下的技术方案:
46、一种电子设备,所述电子设备包括:
47、至少一个处理器;
48、存储器;
49、至少一个应用程序,其中至少一个应用程序被存储在存储器中并被配置为由至少一个处理器执行,所述至少一个应用程序配置用于:执行第一方面提供的任一种基于多传感器融合的高精度定位方法。
50、第三方面,本技术还提供一种计算机可读存储介质,采用如下的技术方案:
51、一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,当所述计算机程序在计算机中执行时,令所述计算机执行第一方面提供的任一种基于多传感器融合的高精度定位方法。
52、综上所述,本技术包括以下至少一种有益技术效果:
53、1.由于驾驶车辆的位置状态数据包括惯导数据和卫星定位数据,如此可以结合惯导数据确定目标车辆的位置信息,从而可以有助于降低卫星定位精度低且不稳定的问题对车辆定位结果的影响,进而可以有助于提高确定出的车辆位置信息的准确性。
54、2.由于在结合卫星定位数据进行定位之前,需要先判断是否采用卫星定位数据进行定位,并在卫星定位数据具有一定可靠性的情况下,才结合卫星定位数据进行定位,如此可以有助于避免误差较大的卫星定位数据对最终定位结果的影响,进而可以有助于提高定位结果的精度。
- 还没有人留言评论。精彩留言会获得点赞!