一种基于无人机的高速路地理信息导航勘测方法与流程
本发明涉及地理信息导航勘测,具体为一种基于无人机的高速路地理信息导航勘测方法。
背景技术:
1、地形测绘是对测量区域的地形、地物等的相对位置在水平面上的投影和高程进行测量,并按一定的标记和符号,以特定的比例绘制成地形图的过程,其成果广泛应用于工程建设、地质勘探、矿山开采、城市规划、用地分析及军事等多个领域。地形测绘发展初期,主要使用测绘仪等进行人工定位测量并绘制图件,随着遥感技术、全球定位系统技术及计算机技术的不断发展,地形测绘工作开始利用卫星及机载测绘系统开展,自此无人机航测技术应运而生并发展壮大,逐渐成为现阶段最常见地形测绘技术。利用无人机航测技术,能快速、精准、高效地获取测量区域的地理信息数据,极大地提高了地形测绘的工作质量和效率。
2、现有的无人机存在的缺陷是:
3、1、专利文件us20160223346a1公开了导航系统,其公开了“本发明涉及导航方法和导航装置。在导航方法中,检测导航装置和导航装置的用户的实际移动。为了达到规定的目的地,导航装置输出导航指令。可以通过用于检测周围环境的装置将反映周围环境的实际几何的信号传输到导航装置。如果认识到没有遵循输出导航指令,则检测反映周围几何形状的信号。基于实际运动与指令规定的运动之间的差异,确定替代导航指令。与最初建议的导航指令相比,替代导航指令构成了原始导航指令建议的移动方向的确认”,现有的无人机采集信息时,工作人员需要时刻观察无人机的位置,防止无人机与周围物体磕碰,导致无人机损坏;
4、2、专利文件us20150300826a1公开了导航系统,其公开了“提供了一种用于在车载设备显示从便携式终端接收的路线指导信息的导航系统中的终端或软件环境的类型的情况下以高精度进行路线引导的技术。导航系统包括安装在车辆中的独立的导航传感器;具有gps的移动终端接收并创建并发送目的地的路线引导信息;以及显示从移动终端接收到的路线引导信息的车载装置。车载设备基于由gps接收机检测的当前位置和由独立的导航传感器检测到的位置变化信息来创建校正的当前位置,并将修正的当前位置发送到移动终端。移动终端基于校正的当前位置和从车载设备接收到的地图信息来创建路线引导信息”,现有的无人机在对地面数据信息进行采集时,大多采用拍摄的方式进行拍摄,导致信息采集不全面;
5、3、专利文件jp2016532513a公开了导航系统,其公开了“本发明涉及干预系统的导航系统和用于导航介入装置中,诸如导管的导航系统。的位置和形状判定部,第一介入程序期间,诸如第一化疗栓塞会话,以确定生物体,专卖店,第二化学介入装置的第一位置和形状下一秒介入程序如栓塞治疗会话以确定生物体内的第二位置和所述介入设备的形状期间。在第二介入程序中,介入设备被导航根据基于所述第一位置和所存储的形状,并且所述第二位置和形状。这使得可以向第二介入程序之间,考虑到在第一介入程序期间所使用的介入设备的所述路径。特别地,这是在第一和第二介入程序,沿着能够导航的相同路径的介入设备之间”,现有的无人机在使用时需要工作人员手动的控制方向,增加了工作人员的工作负担;
6、4、专利文件cn111284694a公开了一种基于卫星定位导航的工程勘察无人机系统及勘察测绘方法,其公开了“包括无人机主体、支撑臂、螺旋桨、起落架、运输装置、取样装置、电源、监测装置、工作站。所述无人机主体内部包括导航定位模块、环境探测模块、测量放样模块、勘察工作监测模块、无线通讯模块、运输模块、取样模块、文本图像识别模块、飞行控制模块、防撞保护模块、电源模块、存储器、丢失找回模块。本发明采用先进的定位导航技术、遥感影像技术、雷达技术、飞行控制技术、实时航拍影像语音通话技术、智慧勘察技术、文本图像识别技术、无线传输技术,将岩土工程勘察与高新技术相结合,实现勘察自动测量放样、坐标高程复测、钻机导航提醒、勘察工作质量进度纠偏、自动运输与取样、人机交互、文本图像自动及无人机丢失找回等多项重要功能”,现有的无人机在降落时,往往采用缓慢降落的方式使得无人机与地面接触实现降落,在此过程中,无人机扇叶持续旋转,随后停止,导致降落力度较大,会损坏无人机,不够安全。
技术实现思路
1、本发明的目的在于提供一种基于无人机的高速路地理信息导航勘测方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种基于无人机的高速路地理信息导航勘测方法,包括导航模块、数据采集模块和信号模块。
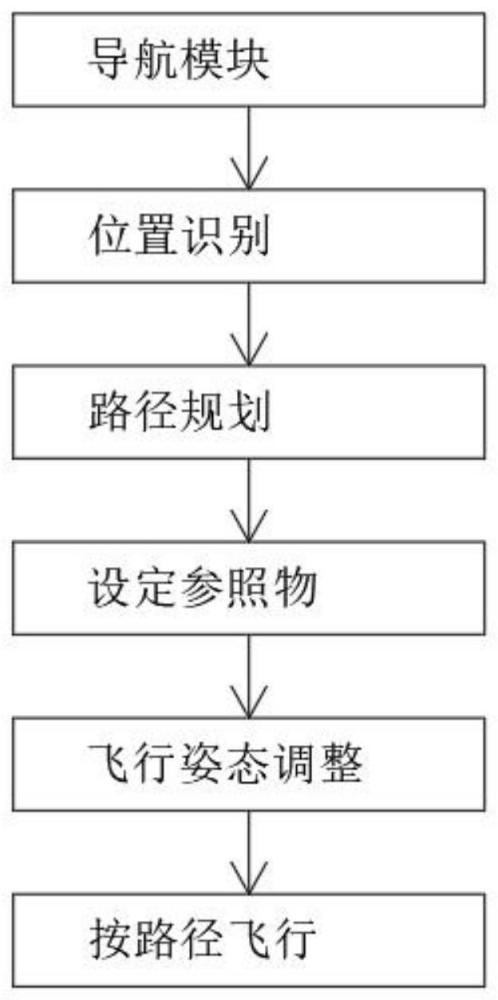
3、优选的,所述导航模块采用gps导航,通过摄像头对地面进行拍照,对地面数据信息进行采集,根据无人机与周围基站的位置和无人机拍摄的照片通过计算得出无人机的位置;
4、根据勘测需要,无人机通过摄像头对需要勘测的公路区域进行拍摄,根据拍摄的照片确定区域范围,根据无人机拍摄的的单张照片的范围,规划无人机的飞行路径,使得无人机的飞行路径覆盖勘测范围,根据飞行的路径点位调整无人机的飞行姿态,规划的无人机三维航迹,需要满足基本约束,包括最大转弯角、最大爬升角或下滑角、最小航迹段长度、最低和最高飞行高度,以及最大航迹长度约束,其中,最大转弯角约束,是指无人机只能在水平面内小于或等于指定的最大转弯角内转弯,最大爬升角或下滑角约束,是指无人机只能在垂直平面内小于或等于指定的最大爬升角或下滑角内爬升或下滑;最小航迹段长度约束,要求无人机改变飞行姿态之前,按目前的航迹方向飞行的最短航程,最低和最高飞行高度约束,要求无人机在指定的飞行高度区间飞行,最大航迹长度约束,是指无人机的航迹长度小于或等于指定的阈值;
5、最大转弯角约束,记最大转弯角为θmax,第i个航迹点qi的水平转弯角为θi,那么θi≤θmax,考虑3个连续的航迹点qi-1,qi-2,qi(i=3,4,5....)那么,航迹段qiqi-1和qi-1qi-2形成的向量在水平面的投影分别为(xi-xi-1,yi-yi-1)和(xi-1-xi-2,yi-1-yi-2),此时,可表示为为最大爬升角或下滑角约束,记最大爬升角或下滑角为ψmax,qi的爬升角或下滑角为ψi,那么ψi小于等于ψmax,考虑两个连续的航迹点qi-1,qi(i=2、3、4...),那么航迹段qiqi-1和qi-1qi-2形成的向量为(xi-xi-1,yi-yi-1,zi-zi-1),此时ψi可表示为最小航迹段长度约束,记最小航迹段长度为lmin,qiqi-1的长度为li,那么,li≥lmin。这里,li可表示为
6、最低和最高飞行高度约束,记最低飞行高度为zmin,最高飞行高度为zmax,那么,zmin≤zi≤zmax;
7、最大航迹长度约束,记最大航迹长度为lmax,那么,航迹为q1q2q3...qn满足
8、无人机的路径规划采用蚁群算法,蚁群的算法基本步骤简单,分为以下几个步骤;
9、步骤1相关参数初始化,蚂蚁种群数m、信息素因子参数、城市规模大小、启发式因子参数、信息素挥发因子ρ参数、信息素常数q、最大迭代次数等;
10、步骤2蚂蚁种群全部随机分配置于不同城市之中,计算每只蚂蚁访问下一个城市的概率大小,根据禁忌表让蚂蚁访问完所有的城市;
11、步骤3随着迭代次数的增加,记录蚂蚁的路径信息,记录当前路径最优解,对不同路径上的信息浓度进行更新,并记录迭代次数;
12、步骤4判断迭代次数是否满足需要继续迭代,不需要则输出最优解,否则继续迭代
13、优选的,所述数据采集模块包括地理信息采集单元、合成单元和传输单元;
14、地理信息采集单元通过勘测探头进行勘测,勘测探头采用激光雷达,通过激光束扫描地面,获取地形和物体高程信息,勘测过程如下;
15、发射激光束,激光雷达通过发射激光束来扫描周围环境,雷达频率为56ghz—156ghz,激光束会以极高的速度发射出去,并在与物体相交时被反射回来;
16、摄像头进行拍照,每秒拍摄35-55帧,拍摄分辨率为1500-3500万像素,通过航拍照片合成地图模型;
17、接收反射信号,激光雷达接收到反射回来的激光信号,并记录下每个反射点的距离和角度信息;
18、合成单元,通过对接收到的反射信号进行处理,激光雷达生成一个三维点云图,其中每个点代表一个扫描到的物体或表面;
19、数据处理:生成的点云数据可以被进一步处理和分析,通过点云数据来检测和识别障碍物、构建环境地图、进行定位和导航,激光雷达通过发射激光束并接收反射信号,然后生成点云数据来获取周围环境的三维信息;
20、传输单元,将扫描出的地理信息数据通过无线信号传输到控制手柄中的存储芯片中储存。
21、优选的,所述信号控制模块包括指令发射单元、指令加密单元和指令接收单元;
22、指令发射单元,采用5.8ghz频段,通过控制手柄和对应的控制钮发射无线信号;
23、指令加密单元,对发射出的指令信号进行加密,使用对称加密方法对信号进行加密;
24、指令接收,无人机上的集成芯片接收并解密信号,控制无人机的飞行路径、飞行姿态、高度和拍摄。
25、优选的,所述无人机的路径规划方法如下;
26、基于势场法的无人机路径规划算法的基本原理是利用势场的梯度来规划无人机的路径,势场为无人机周围的环境对其产生的影响,障碍物、目标点,在势场法中,无人机的目标点被视为吸引子,而障碍物则被视为斥力子,无人机的路径规划过程就是在吸引子和斥力子之间寻找平衡点的过程,在势场法中,无人机的位置被表示为(x,y),势场表示为u(x,y),则势场的梯度表示为u;
27、u(x,y)=(u/x,u/y)
28、在无人机路径规划中,目标点通常被视为吸引子,其势场表示为:
29、u_goal(x,y)=k*((x-x_goal)^2+(y-y_goal)^2)
30、其中,k为常数,(x_goal,y_goal)为目标点的坐标;
31、障碍物通常被视为斥力子,其势场表示为;
32、u_obs(x,y)=∑(k_obs/d_obs-1/d_obs^2)*f(d_obs)
33、其中,k_obs为常数,d_obs为无人机到障碍物的距离,f(d_obs)为障碍物的修正函数,通常为:
34、∫(d_obs)={1,d_obs>d0{(d_obs-d0)^2/((d_obs-d0)^2-1),d_obs<=d0
35、其中,d0为障碍物的作用范围;
36、无人机在势场中的位移表示为:
37、δx=-α*u(x,y)
38、其中,α为步长参数,在无人机路径规划中,需要不断计算无人机周围的势场,并根据势场的梯度来更新无人机的位置,直到无人机到达目标点为止。
39、优选的,该无人机的操作步骤如下:
40、s1、在无人机进行降落时,第三距离传感器检测无人机与地面之间的距离,当检测到距离较近时,第三距离传感器控制挤压结构对气体储存组件内部的气体挤压,随后气体从喷气头中喷出,同时无人机的扇叶停止旋转,无人机受到喷气头向下喷气后向上的推力,使得无人机悬停在地面上方1-2cm处,随后喷气结束,无人机由于重力落下,起落架与地面接触,对无人机缓冲,实现缓冲保护功能。
41、与现有技术相比,本发明的有益效果是:
42、1.本发明通过设有导航模块能够有效的区别需要勘测的区域,防止无人机对其他地区进行勘测,从而提高工作效率;
43、2.本发明通过设有勘测探头和摄像头能够勘测处公路区域的地理信息并且通过拍摄的照片方便对勘测区域建模,方便后续对公路区域进行详细的评估;
44、3.本发明通过设计有路径规划模块让无人机自动的在勘测区域巡回勘测,能够减轻工作人员的工作负担,且通过控制无人机的飞行姿态可以让其自动避障,防止无人机受损;
45、4.本发明通过安装有在无人机进行降落时,第三距离传感器检测无人机与地面之间的距离,当检测到距离较近时,第三距离传感器控制挤压结构对气体储存组件内部的气体挤压,随后气体从喷气头中喷出,同时无人机的扇叶停止旋转,无人机受到喷气头向下喷气后向上的推力,使得无人机悬停在地面上方1-2cm处,随后喷气结束,无人机由于重力落下,起落架与地面接触,对无人机缓冲,实现缓冲保护功能。
- 还没有人留言评论。精彩留言会获得点赞!