一种微动勘探数据采集同步方法及系统与流程
本发明涉及微动探测,具体涉及一种微动勘探数据采集同步方法及系统。
背景技术:
1、地球表面时刻处于一种微弱的震动状态,这种连续的微弱震动称为微动。微动是由体波和面波组成的复杂震动,其中面波的能量占微动总能量的绝大部分。微动勘探技术主要是采用台阵法来采集微动信息,从微动信息的垂直分量中提取面波频散曲线。通过对频散曲线的反演,来获得地下介质的横波速度结构。
2、由于台阵中各采集器彼此间隔有距离,且各采集器将采集的微动信息发送至主机时会附带采集的时间信息,则各微动信息附带的时间信息的准确程度直接影响最终的探测结果的准确性;而现有的探测方案中,各采集器均直接通过自身的时钟模块来确定采集微动信息时的时刻信息,导致各采集器所采集的微动信息的时刻信息容易出现不同步的情况,进而导致主机对各采集的微动信息提取面波频散曲线时出现误差,使得最终的探测结果的准确性降低。
技术实现思路
1、本发明的主要目的是提供一种微动勘探数据采集同步方法及系统,旨在解决现有的探测方案中,各采集器所采集的微动信息的时刻信息容易出现不同步的情况,进而导致最终的探测结果的准确性降低的问题。
2、本发明提出的技术方案为:
3、一种微动勘探数据采集同步方法,应用于微动勘探数据采集同步系统;所述系统包括采集器和主机;所述采集器的数量为多个,且各所述采集器均与所述主机通信连接;所述采集器包括第一处理器、本地时钟模块和微动传感器;所述主机包括gps时钟模块和第二处理器;所述方法,包括:
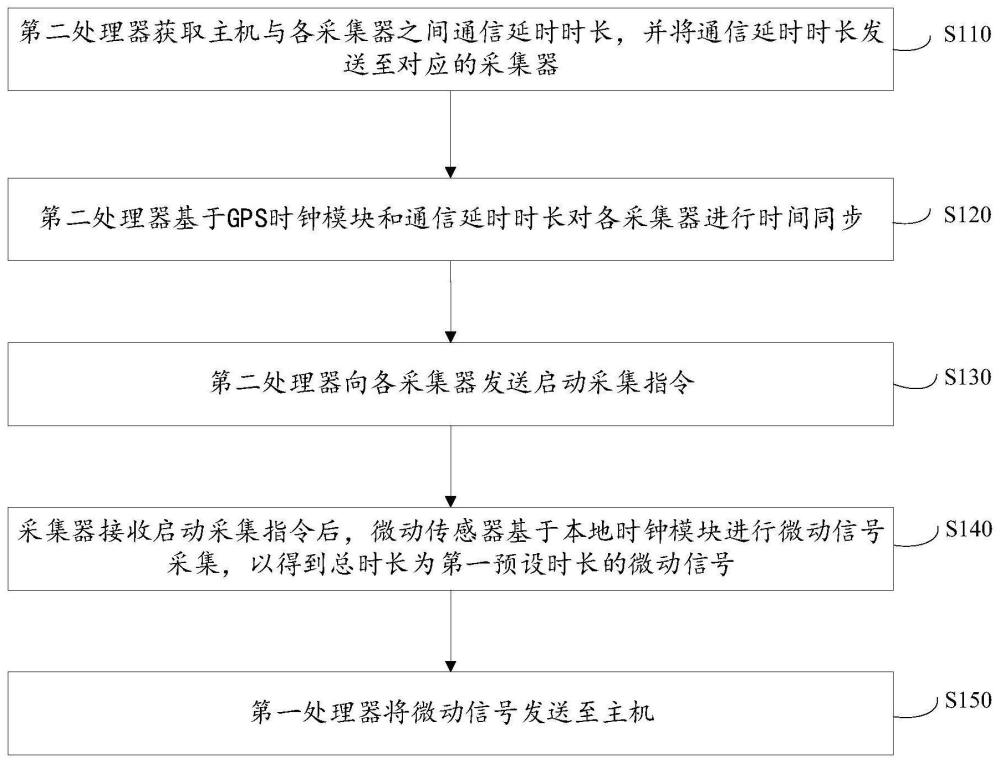
4、第二处理器获取主机与各采集器之间通信延时时长,并将通信延时时长发送至对应的采集器;
5、第二处理器基于gps时钟模块和通信延时时长对各采集器进行时间同步;
6、第二处理器向各采集器发送启动采集指令;
7、采集器接收启动采集指令后,微动传感器基于本地时钟模块进行微动信号采集,以得到总时长为第一预设时长的微动信号,其中,微动信号包括多个时间戳,以及与时间戳对应的振动值;
8、第一处理器将微动信号发送至主机。
9、优选的,所述第二处理器基于gps时钟模块和通信延时时长对各采集器进行时间同步,包括:
10、第二处理器基于gps时钟模块获取授时时刻,并等待第二预设时长后将授时时刻同时发送至各采集器;
11、第一处理器将采集器接收到授时时刻的时刻标记为第一时刻;
12、第一处理器将本地时钟模块的当前时刻标记为定位时刻,并将第一时刻和定位时刻之间的间隔时长标记为第一目标时长,其中,定位时刻晚于第一时刻;
13、第一处理器基于第二预设时长、通信延时时长、第一目标时长和授时时刻确定采集器对应的标准时刻;
14、第一处理器计算标准时刻和定位时刻之间的误差,并基于标准时刻和定位时刻之间的误差重新确定本地时钟模块的时间。
15、优选的,所述第一处理器基于第二预设时长、通信延时时长、第一目标时长和授时时刻确定采集器对应的标准时刻的计算公式为:
16、tb=ts+ty,2+tt+tm,1,
17、式中,tb为标准时刻,精准到微秒;ts为授时时刻,精准到微秒;ty,2为第二预设时长,单位为微秒;tt为通信延时时长,单位为微秒;tm,1为第一目标时长,单位为微秒。
18、优选的,所述第一处理器计算标准时刻和定位时刻之间的误差,并基于标准时刻和定位时刻之间的误差重新确定本地时钟模块的时间,包括:
19、第一处理器计算标准时刻和定位时刻之间的误差时长;
20、第一处理器判断误差时长的绝对值是否小于时长阈值;
21、若是,第一处理器不对本地时钟模块的时间进行修改;
22、若否,第一处理器将本地时钟模块的时间与误差时长相加后确定为新的本地时钟的时间。
23、优选的,所述第一处理器计算标准时刻和定位时刻之间的误差时长的计算公式为:
24、tw=tb-td,
25、式中,tw为误差时长,单位为微秒;td为定位时刻,精准到微秒。
26、优选的,所述启动采集指令包括第一预设时长、采集时长和第三预设时长;第一预设时长大于采集时长;所述第二处理器向各采集器发送启动采集指令,之后还包括:
27、第一处理器将采集器接收启动采集指令的时刻标记为第二时刻;
28、第一处理器确定初始时刻,其中,初始时刻晚于第二时刻;
29、微动传感器启动以采集微动信号,采集的总时长为第一预设时长,其中,微动信号包括时间戳,以及与时间戳对应的振动值,微动信号中第一个时间戳为初始时刻,且微动信号的采集间隔为第三预设时长;
30、第一处理器将微动信号发送至主机。
31、优选的,所述第三预设时长的单位为毫秒;所述第一处理器确定初始时刻,包括:
32、第一处理器将距离第二时刻最近的整秒时刻确定为初始时刻,其中,整秒时刻的精准到微秒,且整秒时刻的微秒值为0,整秒时刻的毫秒值为第三预设时长的正倍数。
33、优选的,所述第一处理器将微动信号发送至主机,之后还包括:
34、第二处理器基于各采集器对应的微动信号,将各采集器对应的微动信号中起始时间戳最晚的微动信号标记为第一目标信号,并将第一目标信号的起始时间戳标记为前限时刻;
35、第二处理器基于各采集器对应的微动信号,将各采集器对应的微动信号中结束时间戳最早的微动信号标记为第二目标信号,并将第二目标信号的结束时间戳标记为后限时刻;
36、第二处理器基于各采集器对应的微动信号和采集时长确定第一时间戳和第二时间戳,其中,第一时间戳晚于前限时刻,第二时间戳早于后限时刻,且第一时间戳和第二时间戳之间的间隔时长为采集时长;
37、第二处理器基于第一时间戳和第二时间戳依次对各采集器对应的微动信号进行对齐处理。
38、优选的,所述第二处理器基于第一时间戳和第二时间戳依次对各采集器对应的微动信号进行对齐处理,包括:
39、第二处理器将微动信号中第一时间戳之前,以及第二时间戳之后的信号删除,以得到对齐处理之后的微动信号。
40、本发明还提出一种微动勘探数据采集同步系统,应用微动勘探数据采集同步方法;所述系统包括采集器和主机;所述采集器的数量为多个,且各所述采集器均与所述主机通信连接;所述采集器包括第一处理器、本地时钟模块和微动传感器;所述主机包括gps时钟模块和第二处理器。
41、通过上述技术方案,能实现以下有益效果:
42、本发明提出的微动勘探数据采集同步方法通过设置主机,以及与主机通信连接的采集器;各采集器将采集到的微动信号发送至主机,主机针对不同位置的采集器的微动信号进行频散曲线的反演,从而获得地下介质的横波速度结构;本方法中主机先通过gps时钟模块来获取授时时刻,并将授时时刻作为标准时间来对各采集器进行时间同步,时间同步之后的各采集器所采集的微动信号之间的偏差更小,从而降低主机对各采集的微动信息提取面波频散曲线时的误差,提升最终的探测结果的准确性。
- 还没有人留言评论。精彩留言会获得点赞!