一种相机和雷达标定方法、装置、电子设备及存储介质与流程
本技术涉及多维感知,特别是涉及一种相机和雷达标定方法、装置、电子设备及存储介质。
背景技术:
1、毫米波雷达和球形摄像机(简称球机)组成了可以对水运场景中的船舶进行检测的监测系统。由于毫米波雷达采集的方位数据和球机采集的图像数据是两种不同的模态,在实现上述监测系统时,需要对雷达采集的方位数据和球机采集的图像数据进行精确的转换,以提高船舶监测效果。
2、相关技术中,由技术人员在现场对水运场景的各个标定参数进行精确的测量,基于测量得到的标定参数,确定得到雷达坐标与球机的ptz值之间的映射关系。进而基于标定出的映射关系,对雷达采集的方位数据和球机采集的图像数据进行转换。然而,上述过程,人工测量标定参数的误差较大,并且在实际应用中需要较高的测量成本,即对相机和雷达标定进行标定的成本较高,且会降低对相机和雷达标定进行标定的效率。
技术实现思路
1、本技术实施例的目的在于提供一种相机和雷达标定方法、装置、电子设备及存储介质,以实现降低对相机和雷达标定进行标定的成本,提高对相机和雷达标定进行标定的效率,并提高确定出的相机的像素坐标系与雷达的雷达坐标系之间的目标转换关系的准确性。具体技术方案如下:
2、第一方面,为了达到上述目的,本技术实施例提供了一种相机和雷达标定方法,所述方法包括:
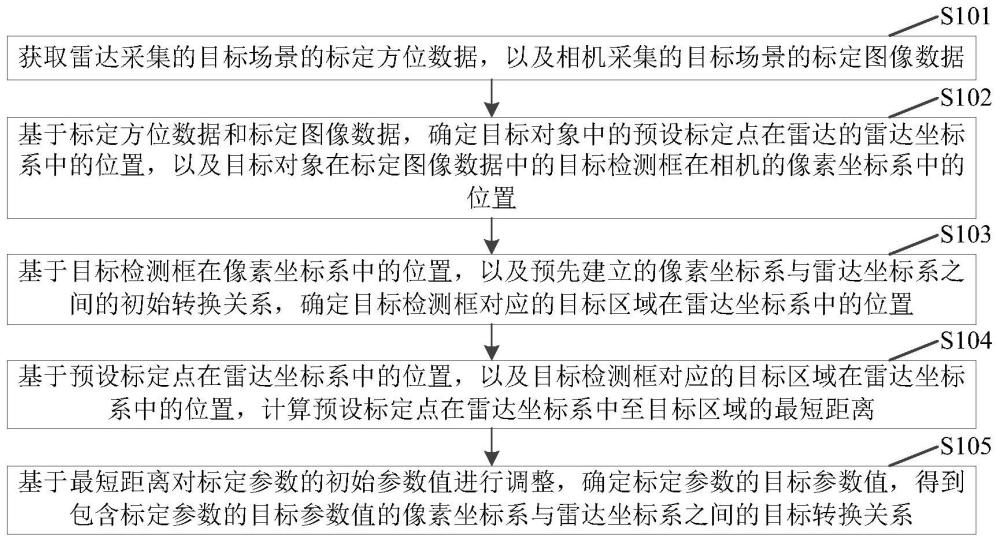
3、获取雷达采集的目标场景的标定方位数据,以及相机采集的所述目标场景的标定图像数据;
4、基于所述标定方位数据和所述标定图像数据,确定目标对象中的预设标定点在所述雷达的雷达坐标系中的位置,以及所述目标对象在所述标定图像数据中的目标检测框在所述相机的像素坐标系中的位置;
5、基于所述目标检测框在所述像素坐标系中的位置,以及预先建立的所述像素坐标系与所述雷达坐标系之间的初始转换关系,确定所述目标检测框对应的所述目标区域在所述雷达坐标系中的位置;其中,所述初始转换关系中的标定参数为初始参数值;
6、基于所述预设标定点在所述雷达坐标系中的位置,以及所述目标检测框对应的所述目标区域在所述雷达坐标系中的位置,计算所述预设标定点在所述雷达坐标系中至所述目标区域的最短距离;
7、基于所述最短距离对所述标定参数的初始参数值进行调整,确定所述标定参数的目标参数值,得到包含所述标定参数的目标参数值的所述像素坐标系与所述雷达坐标系之间的目标转换关系。
8、可选的,所述基于所述目标检测框在所述像素坐标系中的位置,以及预先建立的所述像素坐标系与所述雷达坐标系之间的初始转换关系,确定所述目标检测框对应的所述目标区域在所述雷达坐标系中的位置,包括:基于所述目标检测框中的第一指定点在所述像素坐标系中的二维坐标,以及预先建立的所述像素坐标系与所述雷达坐标系之间的初始转换关系,确定所述目标检测框中的第一指定点在所述雷达坐标系中对应的第二指定点的二维坐标;基于所述相机的z值,以及所述目标检测框的视觉宽度和视觉长度,计算所述目标对象的水平视场角和竖直视场角;其中,所述目标对象的水平视场角为:所述相机与目标对象的左侧边缘之间的连线,与所述相机与所述目标对象的右侧边缘之间的连线之间的夹角;所述目标对象的竖直视场角为:所述相机与目标对象的上侧边缘之间的连线,与所述相机与所述目标对象的下侧边缘之间的连线之间的夹角;所述相机为球形摄像机;基于所述目标对象与所述雷达之间的距离,以及所述目标对象的水平视场角和竖直视场角,计算所述目标检测框在所述雷达坐标系中对应的目标区域的目标宽度和目标长度;基于所述第二指定点在所述雷达坐标系中的二维坐标,以及所述目标宽度和所述目标长度,确定所述目标区域在所述雷达坐标系中的位置。
9、可选的,所述基于所述相机的z值,以及所述目标检测框的宽度和长度,计算所述目标对象的水平视场角和竖直视场角,包括:基于所述相机的z值、第一预设公式,以及所述目标检测框的视觉宽度和视觉长度,计算所述目标对象的水平视场角和竖直视场角;其中,所述第一预设公式包括:
10、γu=wu*fovu(z)
11、γv=wv*fovv(z)
12、yu表示所述目标对象的水平视场角;wu表示所述目标检测框的视觉宽度;fovu(z)表示所述相机的z值对应的所述相机的水平视场角;z表示所述相机的z值;yv表示所述目标对象的竖直视场角;wv表示所述目标检测框的视觉长度;fovv(z)表示所述相机的z值对应的所述相机的竖直视场角。
13、可选的,所述基于所述目标对象与所述雷达之间的距离,以及所述目标对象的水平视场角和竖直视场角,计算所述目标检测框在所述雷达坐标系中对应的目标区域的目标宽度和目标长度,包括:基于所述目标对象与所述雷达之间的距离、第二预设公式,以及所述目标对象的水平视场角和竖直视场角,计算所述目标检测框在所述雷达坐标系中对应的初始预估区域的初始宽度和初始长度;其中,所述第二预设公式包括:
14、west=γu*rradar
15、hest=γv*rradar
16、west表示所述初始宽度;γu表示所述目标对象的水平视场角;rradar表示所述目标对象与所述雷达之间的距离;hest表示所述初始长度;γv表示所述目标对象的竖直视场角;
17、基于所述初始宽度和所述初始长度,确定所述目标检测框在所述雷达坐标系中对应的目标区域的目标宽度和目标长度。
18、可选的,所述基于所述初始宽度和所述初始长度,确定所述目标检测框在所述雷达坐标系中对应的目标区域的目标宽度和目标长度,包括:按照预设调整参数,对所述初始宽度和所述初始长度进行调整,得到所述目标检测框在所述雷达坐标系中对应的目标区域的目标宽度和目标长度。
19、可选的,所述第一指定点为所述目标检测框的底边的中点;
20、所述基于所述第二指定点在所述雷达坐标系中的二维坐标,以及所述目标宽度和所述目标长度,确定所述目标区域在所述雷达坐标系中的位置,包括:按照所述第二指定点为所述目标区域的中心点,与所述目标对象至所述相机之间的连线的方向为所述目标区域的短边所在方向,在所述雷达坐标系中,确定宽度为所述目标宽度,且长度为所述目标长度的矩形区域,得到所述目标区域在所述雷达坐标系中的位置。
21、可选的,所述获取雷达采集的目标场景的标定方位数据,以及相机采集的所述目标场景的标定图像数据,包括:获取雷达在各个历史时刻采集的目标场景的各个标定方位数据,以及相机各个历史时刻采集的所述目标场景的多个标定图像数据;
22、所述基于所述标定方位数据和所述标定图像数据,确定目标对象中的预设标定点在所述雷达的雷达坐标系中的位置,以及所述目标对象在所述标定图像数据中的目标检测框在所述相机的像素坐标系中的位置,包括:针对每一历史时刻,从该历史时刻的标定方位数据中,获取该历史时刻的标定方位数据中的第一对象的预设标定点在所述雷达的雷达坐标系中的位置;对该历史时刻的各个标定图像数据进行目标检测,得到该历史时刻的标定图像数据中的第二对象的检测框在所述相机的像素坐标系中的位置;对该历史时刻的第一对象与第二对象进行组合,得到多个标定数据组;其中,一个标定数据组包括:一个第一对象的预设标定点在所述雷达的雷达坐标系中的位置,以及一个第二对象的检测框在所述相机的像素坐标系中的位置;从所述多个标定数据组中,确定包含目标对象的目标标定数据组;获取所述目标标定数据组中的目标对象中的预设标定点在所述雷达坐标系中的位置,以及所述目标对象在所述标定图像数据中的目标检测框在所述相机的像素坐标系中的位置。
23、可选的,所述从所述多个标定数据组中,确定包含目标对象的目标标定数据组,包括:针对每一标定数据组,在该标定数据组中的第一对象和第二对象的属性信息满足预设的筛选条件时,确定该标定数据组为包含目标对象的目标标定数据组;其中,一个对象的属性信息包括以下至少一项:该对象与雷达之间的距离、该对象的运动速度、尺寸、运动方向。
24、可选的,所述基于所述预设标定点在所述雷达坐标系中的位置,以及所述目标检测框对应的所述目标区域在所述雷达坐标系中的位置,计算所述预设标定点在所述雷达坐标系中至所述目标区域的最短距离,包括:针对每一目标标定数据组,基于该目标标定数据组中的预设标定点在所述雷达坐标系中的位置,以及该标定数据组中的目标区域在所述雷达坐标系中的位置,计算该目标标定数据组中的所述预设标定点在所述雷达坐标系中至所述目标区域的最短距离,得到该目标标定数据组对应的最短距离;
25、所述基于所述最短距离对所述标定参数的初始参数值进行调整,确定所述标定参数的目标参数值,得到包含所述标定参数的目标参数值的所述像素坐标系与所述雷达坐标系之间的目标转换关系,包括:在各个目标标定数据组对应的最短距离不满足预设的收敛条件时,对所述标定参数的初始参数值进行调整得到调整后的初始参数值;返回执行所述基于所述目标检测框在所述像素坐标系中的位置,以及预先建立的所述像素坐标系与所述雷达坐标系之间的初始转换关系,确定所述目标检测框对应的所述目标区域在所述雷达坐标系中的位置的步骤,直至各个目标标定数据组对应的最短距离满足预设的收敛条件,确定初始参数值为目标参数值,得到包含所述标定参数的目标参数值的所述像素坐标系与所述雷达坐标系之间的目标转换关系;
26、所述方法还包括:在各个目标标定数据组对应的最短距离满足预设的收敛条件时,确定所述初始参数值为目标参数值,得到包含所述标定参数的目标参数值的所述像素坐标系与所述雷达坐标系之间的目标转换关系。
27、可选的,所述目标场景为水运场景;
28、在所述基于所述目标检测框在所述像素坐标系中的位置,以及预先建立的所述像素坐标系与所述雷达坐标系之间的初始转换关系,确定所述目标检测框对应的所述目标区域在所述雷达坐标系中的位置之前,所述方法还包括:获取预先记录的各历史时刻所述水运场景的水面高度;确定预先记录的各历史时刻所述水运场景的水面高度中的最小值,得到标定基准平面的水面高度;针对每一历史时刻,计算该历史时刻所述水运场景的水面高度与所述标定基准平面的水面高度的差值,得到该历史时刻对应的水面高度差;计算所述相机的基准高度参数的初始参数值与该历史时刻对应的水面高度差的差值,作为该历史时刻所述相机的高度参数的初始参数值,得到该历史时刻所述像素坐标系与所述雷达坐标系之间的初始转换关系;其中,所述基准高度参数表示:所述相机至所述标定基准平面的高度;
29、所述基于所述目标检测框在所述像素坐标系中的位置,以及预先建立的所述像素坐标系与所述雷达坐标系之间的初始转换关系,确定所述目标检测框对应的所述目标区域在所述雷达坐标系中的位置,包括:针对每一目标标定数据组,基于该目标标定数据组中的所述目标检测框在所述像素坐标系中的位置,以及该目标标定数据组所属的历史时刻的初始转换关系,确定该目标标定数据组中的目标区域在所述雷达坐标系中的位置。
30、可选的,所述相机为球形摄像机;所述雷达为毫米波雷达;
31、所述标定参数包括:所述相机的高度参数;所述相机的p值为o时所述相机的正方向与所述雷达坐标系的x轴的正方向之间的夹角;所述相机指向所述相机的底座倾斜的方向时的p值;所述相机的安装俯仰角;其中,所述安装俯仰角为所述相机的底座与水平面之间的夹角;所述相机的t值的误差量。
32、可选的,所述像素坐标系与所述雷达坐标系之间的转换关系包括:
33、x=r*cos(yawobj+δα)
34、y=r*sin(yawobj+δα)
35、
36、
37、
38、
39、t1=t+t0
40、yaw0=arctan2{sin(p-p0),cos[(p-p0)*|cosθ|]}
41、dv=v-0.5
42、du=u-0.5
43、(x,y)表示对象中的目标特征点在bev坐标系中的二维坐标;r表示所述目标特征点与所述雷达坐标系的原点之间的距离;(u,v)表示所述目标特征点在所述像素坐标系中的归一化后的二维坐标;pitchobj表示所述相机的光心和对象之间的连线与水平面的夹角;yawobj表示所述目标特征点在所述雷达坐标系中的方位角;δα表示所述相机的p值为o时所述相机的正方向与所述雷达坐标系的x轴的正向之间的角度差;h表示所述相机的高度参数;t1表示所述相机的实际t值;表示所述相机的底座与水平方向之间的倾斜角度;dv表示所述目标特征点在所述像素坐标系中归一化后的纵坐标相对于图像中心的偏移量;du表示所述目标特征点在所述像素坐标系中归一化后的横坐标相对于图像中心的偏移量;z表示所述相机当前的z值;f0vv(z)表示所述相机当前的z值对应的所述相机的竖直视场角;fovu(z)表示所述相机当前的z值对应的所述相机的水平竖直视场角;yaw0表示所述相机从p值为p0至p值为p进行转动时,所述相机在所述水平面上转过的角度;t表示所述相机当前的t值;t0表示所述相机的t值的误差量;p表示所述相机当前的p值;p0表示所述相机指向所述相机的底座倾斜的方向时的p值;θ表示所述相机的安装俯仰角;
44、所述bev坐标系以所述雷达在水平面中的投影点为坐标原点,所述bev坐标系的x轴和y轴位于水平面内;所述bev坐标系的x轴的正方向与所述雷达坐标系的x轴的正方向相同。
45、第二方面,为了达到上述目的,本技术实施例提供了一种相机和雷达标定装置,所述装置包括:
46、数据获取模块,用于获取雷达采集的目标场景的标定方位数据,以及相机采集的所述目标场景的标定图像数据;
47、第一位置确定模块,用于基于所述标定方位数据和所述标定图像数据,确定目标对象中的预设标定点在所述雷达的雷达坐标系中的位置,以及所述目标对象在所述标定图像数据中的目标检测框在所述相机的像素坐标系中的位置;
48、第二位置确定模块,用于基于所述目标检测框在所述像素坐标系中的位置,以及预先建立的所述像素坐标系与所述雷达坐标系之间的初始转换关系,确定所述目标检测框对应的所述目标区域在所述雷达坐标系中的位置;其中,所述初始转换关系中的标定参数为初始参数值;
49、最短距离确定模块,用于基于所述预设标定点在所述雷达坐标系中的位置,以及所述目标检测框对应的所述目标区域在所述雷达坐标系中的位置,计算所述预设标定点在所述雷达坐标系中至所述目标区域的最短距离;
50、第一转换关系确定模块,用于基于所述最短距离对所述标定参数的初始参数值进行调整,确定所述标定参数的目标参数值,得到包含所述标定参数的目标参数值的所述像素坐标系与所述雷达坐标系之间的目标转换关系。
51、可选的,所述第二位置确定模块,具体用于基于所述目标检测框中的第一指定点在所述像素坐标系中的二维坐标,以及预先建立的所述像素坐标系与所述雷达坐标系之间的初始转换关系,确定所述目标检测框中的第一指定点在所述雷达坐标系中对应的第二指定点的二维坐标;基于所述相机的z值,以及所述目标检测框的视觉宽度和视觉长度,计算所述目标对象的水平视场角和竖直视场角;其中,所述目标对象的水平视场角为:所述相机与目标对象的左侧边缘之间的连线,与所述相机与所述目标对象的右侧边缘之间的连线之间的夹角;所述目标对象的竖直视场角为:所述相机与目标对象的上侧边缘之间的连线,与所述相机与所述目标对象的下侧边缘之间的连线之间的夹角;所述相机为球形摄像机;基于所述目标对象与所述雷达之间的距离,以及所述目标对象的水平视场角和竖直视场角,计算所述目标检测框在所述雷达坐标系中对应的目标区域的目标宽度和目标长度;基于所述第二指定点在所述雷达坐标系中的二维坐标,以及所述目标宽度和所述目标长度,确定所述目标区域在所述雷达坐标系中的位置。
52、可选的,所述第二位置确定模块,具体用于基于所述相机的z值、第一预设公式,以及所述目标检测框的视觉宽度和视觉长度,计算所述目标对象的水平视场角和竖直视场角;其中,所述第一预设公式包括:
53、γu=wu*fovu(z)
54、γv=wv*fovv(z)
55、yu表示所述目标对象的水平视场角;wu表示所述目标检测框的视觉宽度;fovu(z)表示所述相机的z值对应的所述相机的水平视场角;z表示所述相机的z值;yv表示所述目标对象的竖直视场角;wv表示所述目标检测框的视觉长度;fovv(z)表示所述相机的z值对应的所述相机的竖直视场角。
56、可选的,所述第二位置确定模块,具体用于基于所述目标对象与所述雷达之间的距离、第二预设公式,以及所述目标对象的水平视场角和竖直视场角,计算所述目标检测框在所述雷达坐标系中对应的初始预估区域的初始宽度和初始长度;其中,所述第二预设公式包括:
57、west=γu*rradar
58、hest=γv*rradar
59、west表示所述初始宽度;γu表示所述目标对象的水平视场角;rradar表示所述目标对象与所述雷达之间的距离;hest表示所述初始长度;γv表示所述目标对象的竖直视场角;
60、基于所述初始宽度和所述初始长度,确定所述目标检测框在所述雷达坐标系中对应的目标区域的目标宽度和目标长度。
61、可选的,所述第二位置确定模块,具体用于按照预设调整参数,对所述初始宽度和所述初始长度进行调整,得到所述目标检测框在所述雷达坐标系中对应的目标区域的目标宽度和目标长度。
62、可选的,所述第一指定点为所述目标检测框的底边的中点;
63、所述第二位置确定模块,具体用于按照所述第二指定点为所述目标区域的中心点,与所述目标对象至所述相机之间的连线的方向为所述目标区域的短边所在方向,在所述雷达坐标系中,确定宽度为所述目标宽度,且长度为所述目标长度的矩形区域,得到所述目标区域在所述雷达坐标系中的位置。
64、可选的,所述数据获取模块,用于获取雷达在各个历史时刻采集的目标场景的各个标定方位数据,以及相机各个历史时刻采集的所述目标场景的多个标定图像数据;
65、所述第一位置确定模块,具体用于针对每一历史时刻,从该历史时刻的标定方位数据中,获取该历史时刻的标定方位数据中的第一对象的预设标定点在所述雷达的雷达坐标系中的位置;对该历史时刻的各个标定图像数据进行目标检测,得到该历史时刻的标定图像数据中的第二对象的检测框在所述相机的像素坐标系中的位置;对该历史时刻的第一对象与第二对象进行组合,得到多个标定数据组;其中,一个标定数据组包括:一个第一对象的预设标定点在所述雷达的雷达坐标系中的位置,以及一个第二对象的检测框在所述相机的像素坐标系中的位置;从所述多个标定数据组中,确定包含目标对象的目标标定数据组;获取所述目标标定数据组中的目标对象中的预设标定点在所述雷达坐标系中的位置,以及所述目标对象在所述标定图像数据中的目标检测框在所述相机的像素坐标系中的位置。
66、可选的,所述第一位置确定模块,具体用于针对每一标定数据组,在该标定数据组中的第一对象和第二对象的属性信息满足预设的筛选条件时,确定该标定数据组为包含目标对象的目标标定数据组;其中,一个对象的属性信息包括以下至少一项:该对象与雷达之间的距离、该对象的运动速度、尺寸、运动方向。
67、可选的,所述最短距离确定模块,具体用于针对每一目标标定数据组,基于该目标标定数据组中的预设标定点在所述雷达坐标系中的位置,以及该标定数据组中的目标区域在所述雷达坐标系中的位置,计算该目标标定数据组中的所述预设标定点在所述雷达坐标系中至所述目标区域的最短距离,得到该目标标定数据组对应的最短距离;
68、所述第一转换关系确定模块,具体用于在各个目标标定数据组对应的最短距离不满足预设的收敛条件时,对所述标定参数的初始参数值进行调整得到调整后的初始参数值;返回执行所述基于所述目标检测框在所述像素坐标系中的位置,以及预先建立的所述像素坐标系与所述雷达坐标系之间的初始转换关系,确定所述目标检测框对应的所述目标区域在所述雷达坐标系中的位置的步骤,直至各个目标标定数据组对应的最短距离满足预设的收敛条件,确定初始参数值为目标参数值,得到包含所述标定参数的目标参数值的所述像素坐标系与所述雷达坐标系之间的目标转换关系;
69、所述装置还包括:
70、第二转换关系确定模块,用于在各个目标标定数据组对应的最短距离满足预设的收敛条件时,确定所述初始参数值为目标参数值,得到包含所述标定参数的目标参数值的所述像素坐标系与所述雷达坐标系之间的目标转换关系。
71、可选的,所述目标场景为水运场景;
72、所述装置还包括:
73、水面高度获取模块,用于在所述第二位置确定模块执行基于所述目标检测框在所述像素坐标系中的位置,以及预先建立的所述像素坐标系与所述雷达坐标系之间的初始转换关系,确定所述目标检测框对应的所述目标区域在所述雷达坐标系中的位置之前,执行获取预先记录的各历史时刻所述水运场景的水面高度;
74、水面高度确定模块,用于确定预先记录的各历史时刻所述水运场景的水面高度中的最小值,得到标定基准平面的水面高度;
75、水面高度差确定模块,用于针对每一历史时刻,计算该历史时刻所述水运场景的水面高度与所述标定基准平面的水面高度的差值,得到该历史时刻对应的水面高度差;
76、第三转换关系确定模块,用于计算所述相机的基准高度参数的初始参数值与该历史时刻对应的水面高度差的差值,作为该历史时刻所述相机的高度参数的初始参数值,得到该历史时刻所述像素坐标系与所述雷达坐标系之间的初始转换关系;其中,所述基准高度参数表示:所述相机至所述标定基准平面的高度;
77、所述第二位置确定模块,具体用于针对每一目标标定数据组,基于该目标标定数据组中的所述目标检测框在所述像素坐标系中的位置,以及该目标标定数据组所属的历史时刻的初始转换关系,确定该目标标定数据组中的目标区域在所述雷达坐标系中的位置。
78、可选的,所述相机为球形摄像机;所述雷达为毫米波雷达;
79、所述标定参数包括:所述相机的高度参数;所述相机的p值为0时所述相机的正方向与所述雷达坐标系的x轴的正方向之间的夹角;所述相机指向所述相机的底座倾斜的方向时的p值;所述相机的安装俯仰角;其中,所述安装俯仰角为所述相机的底座与水平面之间的夹角;所述相机的t值的误差量。
80、可选的,所述像素坐标系与所述雷达坐标系之间的转换关系包括:
81、x=r*cos(yawobj+δα)
82、y=r*sin(yawobj+δα)
83、
84、
85、
86、
87、t1=t+t0
88、yaw0=arctan2{sin(p-p0),cos[(p-p0)*|cosθ|]}
89、dv=v-0.5
90、du=u-0.5
91、(x,y)表示对象中的目标特征点在bev坐标系中的二维坐标;r表示所述目标特征点与所述雷达坐标系的原点之间的距离;(u,v)表示所述目标特征点在所述像素坐标系中的归一化后的二维坐标;pitchobj表示所述相机的光心和对象之间的连线与水平面的夹角;yawobj表示所述目标特征点在所述雷达坐标系中的方位角;δα表示所述相机的p值为o时所述相机的正方向与所述雷达坐标系的x轴的正向之间的角度差;h表示所述相机的高度参数;t1表示所述相机的实际t值;表示所述相机的底座与水平方向之间的倾斜角度;dv表示所述目标特征点在所述像素坐标系中归一化后的纵坐标相对于图像中心的偏移量;du表示所述目标特征点在所述像素坐标系中归一化后的横坐标相对于图像中心的偏移量;z表示所述相机当前的z值;fovv(z)表示所述相机当前的z值对应的所述相机的竖直视场角;fovu(z)表示所述相机当前的z值对应的所述相机的水平竖直视场角;yaw0表示所述相机从p值为p0至p值为p进行转动时,所述相机在所述水平面上转过的角度;t表示所述相机当前的t值;t0表示所述相机的t值的误差量;p表示所述相机当前的p值;p0表示所述相机指向所述相机的底座倾斜的方向时的p值;θ表示所述相机的安装俯仰角;
92、所述bev坐标系以所述雷达在水平面中的投影点为坐标原点,所述bev坐标系的x轴和y轴位于水平面内;所述bev坐标系的x轴的正方向与所述雷达坐标系的x轴的正方向相同。
93、本技术实施例还提供了一种电子设备,包括:存储器,用于存放计算机程序;处理器,用于执行存储器上所存放的程序时,实现上述任一所述的相机和雷达标定方法。
94、本技术实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述任一所述的相机和雷达标定方法。
95、本技术实施例还提供了一种包含指令的计算机程序产品,当其在计算机上运行时,使得计算机执行上述任一所述的相机和雷达标定方法。
96、本技术实施例有益效果:
97、本技术实施例提供的一种相机和雷达标定方法,获取雷达采集的目标场景的标定方位数据,以及相机采集的目标场景的标定图像数据。基于标定方位数据和标定图像数据,确定目标对象中的预设标定点在雷达的雷达坐标系中的位置,以及目标对象在标定图像数据中的目标检测框在相机的像素坐标系中的位置。基于目标检测框在像素坐标系中的位置,以及预先建立的像素坐标系与雷达坐标系之间的初始转换关系,确定目标检测框对应的目标区域在雷达坐标系中的位置,初始转换关系中的标定参数为初始参数值。基于预设标定点在雷达坐标系中的位置,以及目标检测框对应的目标区域在雷达坐标系中的位置,计算预设标定点在雷达坐标系中至目标区域的最短距离。基于最短距离对标定参数的初始参数值进行调整,确定标定参数的目标参数值,得到包含标定参数的目标参数值的像素坐标系与雷达坐标系之间的目标转换关系。
98、基于上述处理,无需人工测量目标场景的标定参数,就可以自动确定出像素坐标系与雷达坐标系之间的目标转换关系,可以降低对相机和雷达标定进行标定的成本,提高对相机和雷达标定进行标定的效率。并且,目标对象中的预设标定点为目标对象中的标定点,目标区域为目标对象所在的区域。相应的,预设标定点位于目标区域内,基于预设标定点在雷达坐标系中至目标区域的最短距离对标定参数的参数值进行调整,可以提高确定出的目标转换关系的准确性。后续,可以基于目标转换关系对方位数据和图像数据进行精确的转换,针对水运场景可以提高船舶监测的准确性。
99、当然,实施本技术的任一产品或方法并不一定需要同时达到以上所述的所有优点。
- 还没有人留言评论。精彩留言会获得点赞!