一种船载海岛礁地形水深一体化测绘系统及方法与流程
本发明属于海洋测量,尤其是一种船载海岛礁地形水深一体化测绘系统及方法。
背景技术:
1、海岛礁地形水深测量是一项非常重要且复杂的任务。在进行海岛礁地形水深测量时,地形测量通常采用传统rtk技术,对地貌地物特征点进行逐个采集,而水深测量采用gnss和声学定位技术,利用船载平台进行多波束或单波束水深测量。由于海岛礁的海岸带受地形、潮汐等因素影响,无法实现海岸带全覆盖测绘,岛礁地形、水深测量成果拼接困难,尤其是传统rtk地形测量作业效率低、机动性差、无法满足在植被茂密岛礁和高辐射、高污染、泥滩、悬崖等人员难以到达区域开展高效作业需求。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种测绘准确、效率高且有效降低测绘成本的船载海岛礁地形水深一体化测绘系统及方法。
2、本发明解决现有的技术问题是采取以下技术方案实现的:
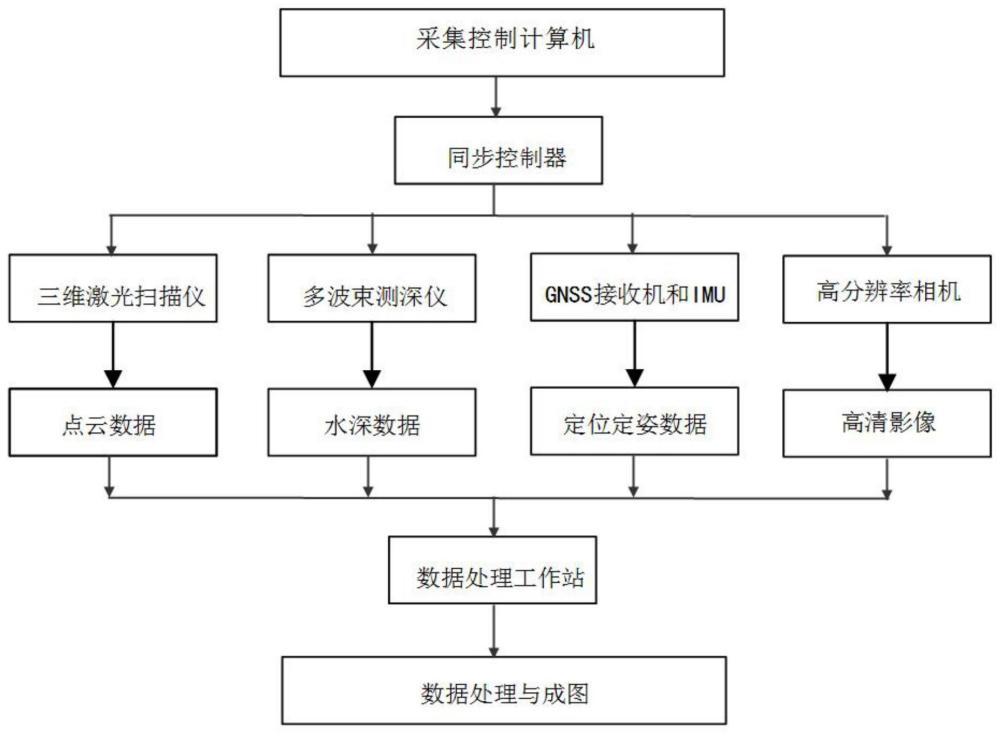
3、一种船载海岛礁地形水深一体化测绘系统,包括安装在船体上的三维激光测量子系统、水深测量子系统、导航定位定姿子系统、影像采集子系统、采集控制子系统、数据处理子系统,其中,三维激光测量子系统、水深测量子系统、影像采集子系统、导航定位定姿子系统在采集控制子系统的控制下同步采集点云数据、水深数据、定位定姿数据及高清影像数据,并发送给数据处理子系统,数据处理子系统对接收的数据进行处理,生成海岛礁地形水深一体化地形图。
4、进一步,所述三维激光测量子系统采用高精度三维激光扫描仪,采集处理后得到三维激光点云数据;所述水深测量子系统由多波束测深仪及表面声速仪、声速剖面仪组成,测量处理后得到水深数据;所述导航定位定姿子系统由2个gnss天线、1台imu和pos计算机,用于精准地提供船体的姿态、航向、涌浪、位置和速度数据,为三维激光扫描仪、多波束测深仪和高分辨相机提供精确的定位定姿数据;所述影像采集子系统采用高分辨相机,用于采集海岛礁的影像数据。
5、进一步,所述采集控制子系统由控制计算机及同步控制器构成,在控制计算机安装一体化移动三维测量系统操控软件,用于三维激光测量子系统、水深测量子系统、导航定位定姿子系统、影像采集子系统的同步采集控制功能。
6、进一步,所述数据处理子系统由数据处理工作站及其内置的数据处理与成图软件构成,所述数据处理与成图软件对三维激光测量子系统、水深测量子系统、导航定位定姿子系统采集的数据进行系统误差校验与消除处理并生成水域点云数据,再将水域点云数据与影像采集子系统采集的影像数据进行点云融合、地物分类,得到海岛礁地形水深一体化地形图。
7、进一步,所述海岛礁地形水深一体化地形图包括数字地形模型dtm、数字高程模型dem及三维分类效果图。
8、一种实现船载海岛礁地形水深一体化测绘系统的方法,包括以下步骤:
9、步骤1、采集控制子系统同步控制三维激光测量子系统、水深测量子系统、导航定位定姿子系统、影像采集子系统采集点云数据、水深数据、定位定姿数据及高清影像数据;
10、步骤2、数据处理子系统对步骤1采集的数据进行水域点云处理,得到融合点云数据;
11、步骤3、数据处理子系统根据融合点云数据,生成海岛礁地形水深一体化地形图;
12、步骤4、数据处理子系统对初步生成海岛礁地形水深一体化地形图进行质检,如存在问题,在返回步骤3进行修改,否则,生成最终的海岛礁地形水深一体化地形图。
13、进一步,所述海岛礁地形水深一体化地形图包括一体化dlg与元数据、一体化dem与元数据、一体化断面图及成果表。
14、进一步,所述步骤2的具体实现方法为:数据处理子系统接收船载激光点云、水下多波束点云数据并进行数据预处理,对边岸地面点云进行抽取,然后依次进行点云抽稀、范围调整及水域要素绘制,得到水域点云数据。
15、进一步,所述步骤3的具体实现方法为:
16、首先,数据处理子系统对水域点云数据进行一体化网格模型生产,生成对应的三维网格模型;
17、然后,数据处理子系统加载显示点云数据,选择测图要素,进行点、线、面数字化测图;加载显示全景影像,选择测图要素,进行点、线、面数字化测图;加载显示多波束数据,选择测图要素,进行点、线、面数字化测图,得到一体化dlg与元数据;
18、在得到一体化dlg与元数据的基础上,提取等高线、高程点及其他要素,构建tin,得到一体化dem与元数据;
19、在得到dem及元数据的基础上,绘制纵、横断面线,得到一体化断面图及成果表。
20、本发明的优点和积极效果是:
21、1、本发明通过三维激光测量子系统、水深测量子系统、导航定位定姿子系统和影像采集子系统,对岛礁、海岸线及港口的沿岸、水下地形进行高精度、灵活、快速的测量作业,实现海岛礁地形水深一体化测绘功能,为岛礁及沿岸水深和陆地地形测量提供高效技术手段和解决方案,满足了地形和水深同步测量的技术要求,大幅提升了作业效率,降低了作业难度和风险。
22、2、本发明建立了同一平台的时空基准并通过多模块一体化集成实现了海岛礁测量水上水下全覆盖,解决了基准不统一和海陆拼接复杂的难题,通过数据融合处理,减少了资料处理时垂直基准的转换误差,提高地形、水深测量数据拼接精度。
23、3、本发明能够同时进行地形水深综合测量,一次作业可同时获取水上和水下测量数据,较传统测量方法提高数倍作业效率和综合效能。
24、4、本发明实现海岛礁高精度一体化网格模型制作功能,可输出包括大比例尺岛礁地形图、水深成果图和全景影像等多种测量成果。
技术特征:
1.一种船载海岛礁地形水深一体化测绘系统,其特征在于:包括安装在船体上的三维激光测量子系统、水深测量子系统、导航定位定姿子系统、影像采集子系统、采集控制子系统、数据处理子系统,其中,三维激光测量子系统、水深测量子系统、影像采集子系统、导航定位定姿子系统在采集控制子系统的控制下同步采集点云数据、水深数据、定位定姿数据及高清影像数据,并发送给数据处理子系统,数据处理子系统对接收的数据进行处理,生成海岛礁地形水深一体化地形图。
2.根据权利要求1所述的一种船载海岛礁地形水深一体化测绘系统,其特征在于:所述三维激光测量子系统采用高精度三维激光扫描仪,采集处理后得到三维激光点云数据;所述水深测量子系统由多波束测深仪及表面声速仪、声速剖面仪组成,测量处理后得到水深数据;所述导航定位定姿子系统由2个gnss天线、1台imu和pos计算机,用于精准地提供船体的姿态、航向、涌浪、位置和速度数据,为三维激光扫描仪、多波束测深仪和高分辨相机提供精确的定位定姿数据;所述影像采集子系统采用高分辨相机,用于采集海岛礁的影像数据。
3.根据权利要求1所述的一种船载海岛礁地形水深一体化测绘系统,其特征在于:所述采集控制子系统由控制计算机及同步控制器构成,在控制计算机安装一体化移动三维测量系统操控软件,用于三维激光测量子系统、水深测量子系统、导航定位定姿子系统、影像采集子系统的同步采集控制功能。
4.根据权利要求1所述的一种船载海岛礁地形水深一体化测绘系统,其特征在于:所述数据处理子系统由数据处理工作站及其内置的数据处理与成图软件构成,所述数据处理与成图软件对三维激光测量子系统、水深测量子系统、导航定位定姿子系统采集的数据进行系统误差校验与消除处理并生成水域点云数据,再将水域点云数据与影像采集子系统采集的影像数据进行点云融合、地物分类,得到海岛礁地形水深一体化地形图。
5.根据权利要求1至4任一项所述的一种船载海岛礁地形水深一体化测绘系统,其特征在于:所述海岛礁地形水深一体化地形图包括数字地形模型dtm、数字高程模型dem及三维分类效果图。
6.一种实现权利要求1至5任一项所述的船载海岛礁地形水深一体化测绘系统的方法,其特征在于:包括以下步骤:
7.根据权利要求6所述的一种实现船载海岛礁地形水深一体化测绘系统的方法,其特征在于:所述海岛礁地形水深一体化地形图包括一体化dlg与元数据、一体化dem与元数据、一体化断面图及成果表。
8.根据权利要求7所述的一种实现船载海岛礁地形水深一体化测绘系统的方法,其特征在于:所述步骤2的具体实现方法为:数据处理子系统接收船载激光点云、水下多波束点云数据并进行数据预处理,对边岸地面点云进行抽取,然后依次进行点云抽稀、范围调整及水域要素绘制,得到水域点云数据。
9.根据权利要求7所述的一种实现船载海岛礁地形水深一体化测绘系统的方法,其特征在于:所述步骤3的具体实现方法为:
技术总结
本发明涉及一种船载海岛礁地形水深一体化测绘系统及方法,其特点是:包括安装在船体上的三维激光测量子系统、水深测量子系统、导航定位定姿子系统、影像采集子系统、采集控制子系统和数据处理子系统,三维激光测量子系统、水深测量子系统、影像采集子系统和导航定位定姿子系统在采集控制子系统的控制下同步采集数据,并发送给数据处理子系统,数据处理子系统对接收的数据进行处理,生成海岛礁地形水深一体化地形图。本发明实现了海岛礁地形水深一体化测绘功能,为岛礁及沿岸水深和陆地地形测量提供高效技术手段和解决方案,满足地形和水深同步测量的技术要求,大幅提升作业效率,降低作业难度和风险。
技术研发人员:李凯锋,徐广袖,邓凯亮,刘敏,孙雪洁,姚俊杰,青平,蒋其伟,王双喜,邹旺,邢超
受保护的技术使用者:中国人民解放军92859部队
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!