基于框架导引头的目标测距方法与流程
本发明涉及计算机,尤其涉及一种基于框架导引头的目标测距方法。
背景技术:
1、目前目标测距方法主要有两种途径,1种是导引头配备激光测距辅助的目标距离测量方法,该模式下需要导引头+激光测距仪配合使用,系统组成较为复杂,且双光(可见光导引头+激光测距仪)导引头重量相对较高,进一步增加了对飞行平台搭载能力的要求;另外1种是多导引头(至少2个导引头)协同目标测距方法,该模式下需要有多个空中平台(至少2个飞行平台),平台之间必须配合完成测距工作,至少有2个导引头同时锁定目标情况下方能发挥作用,并且依赖自组网数据链进行信息交互,进而解算目标距离,系统组成复杂,并且操作难度较大。
技术实现思路
1、本发明的目的就在于为了解决上述问题设计了一种基于框架导引头的目标测距方法。
2、本发明通过以下技术方案来实现上述目的:
3、基于框架导引头的目标测距方法,包括:
4、s1、飞行平台锁定跟踪目标后,对导引头输出的弹目角度信息,以及飞行平台笛卡尔坐标测量信息通过数据缓存区进行存储;
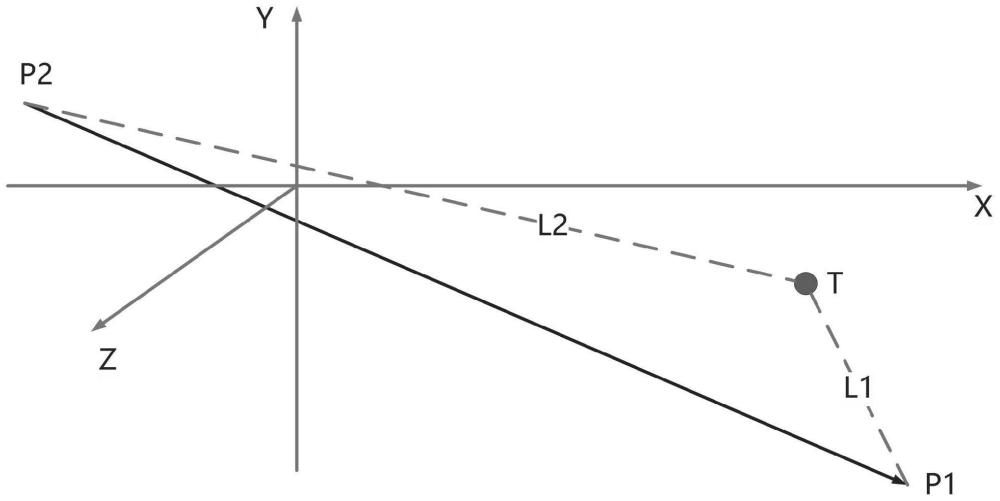
5、s2、获取数据缓存区储存的数据,并设t0时刻的导引头和飞行平台笛卡尔测量信息在点p2,t0+△t时刻的导引头和飞行平台笛卡尔测量信息在点p1;
6、s3、p1、p2分别与目标t连线,形成两条弹目连线p1t、p2t;
7、s4、设两条弹目连线的弹目距离分别为l1和l2;
8、s5、将两条弹目连线p1t、p2t的矢量向分别p1和p2位置的地理坐标系投影;
9、s6、根据点p1和点p2的经纬高坐标,分析点p2到点p1连线的矢量在p1位置的地理坐标系的投影;
10、s7、求解弹目距离l1和l2。
11、本发明的有益效果在于:通过建立数据缓存区的方法,基于单飞行平台带导引头先后在两点p1和p2上对目标的观测数据,模拟了两机协同测距的工作模式,即实现对目标距离的解算,简化了系统组成,降低了使用成本和操作复杂度。
技术特征:
1.基于框架导引头的目标测距方法,其特征在于,包括:
2.根据权利要求1所述的基于框架导引头的目标测距方法,其特征在于,在s5中,弹目连线p1t的矢量表示为[l1;0;0],弹目连线p2t的矢量表示为[l2;0;0],弹目连线p1t的矢量向p1位置的地理坐标系投影表示为:
3.根据权利要求1所述的基于框架导引头的目标测距方法,其特征在于,在s6中包括:
4.根据权利要求1所述的基于框架导引头的目标测距方法,其特征在于,在s7中包括:
技术总结
本发明公开了基于框架导引头的目标测距方法,涉及计算机技术领域,包括S1飞行平台锁定跟踪目标后,对导引头输出的弹目角度信息,以及飞行平台笛卡尔坐标测量信息通过数据缓存区进行存储;S2设T<subgt;0</subgt;时刻的导引头和飞行平台笛卡尔测量信息在点P<subgt;2</subgt;,T<subgt;0</subgt;+△T时刻的导引头和飞行平台笛卡尔测量信息在点P<subgt;1</subgt;;S3、P<subgt;1</subgt;、P<subgt;2</subgt;分别与目标T连线,形成两条弹目连线P<subgt;1</subgt;T、P<subgt;2</subgt;T;S4设P<subgt;1</subgt;T、P<subgt;2</subgt;T的弹目距离分别为L<subgt;1</subgt;和L<subgt;2</subgt;;S5将P<subgt;1</subgt;T、P<subgt;2</subgt;T的矢量分别向P<subgt;1</subgt;和P<subgt;2</subgt;地理坐标系投影;S6分析P<subgt;2</subgt;到P<subgt;1</subgt;连线的矢量在地理坐标系的投影;S7求解L<subgt;1</subgt;和L<subgt;2</subgt;;通过建立数据缓存区,基于单飞行平台带导引头在P<subgt;1</subgt;和P<subgt;2</subgt;上对目标的观测数据,即实现对目标距离的解算,简化了系统组成,降低了使用成本和操作复杂度。
技术研发人员:袁鸣,闫朋朋,李波,赵林东,刘智陶,李皓,鲍泳林,陈强洪
受保护的技术使用者:中国工程物理研究院总体工程研究所
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!