车载雷达的目标同步方法、装置、设备及存储介质与流程
本技术涉及自动驾驶领域,特别涉及一种车载雷达的目标同步方法、装置、设备及存储介质。
背景技术:
1、在自动驾驶领域,为实现车辆的场景感知,采用多个雷达组合的形式可以互相补充,实现全场景覆盖的能力。为做到多个雷达点云数据的时空同步,常见的方法是相位同步法,将多个雷达的电机保持同一时刻相同的相位。现有技术中,一种方法是使用周期性的脉冲信号作为多个雷达的控制信号,雷达在收到脉冲信号后根据雷达当前相位与同步相位的相位差、当前电机转速来调节电机转速,实现多个雷达的相位同步。另一种方法是以其中一个雷达作为周期脉冲的同步源,其他一个或多个雷达接收到脉冲信号后调节电机转速来完成相位同步。或者将其中一个雷达作为主机,发送扫描角度信息和频率信息至其他雷达,其他雷达接收到信息后根据自身当前扫描角度信息与频率信息进行调节实现相位同步。
2、使用相位同步法可以将多个雷达的同步误差缩小,但由于雷达与雷达的安装位置角度不同,目标在同一时刻被多个雷达同一相位扫描到的目标位置,实际上仍存在时间和空间上的偏移,特别是目标相对速度较大时偏移更明显,在点云融合后目标点云融合结果会存在偏差。
3、因此,为了进一步提升点云融合精度,亟需一种解决多个雷达同一相位扫描到的目标位置上存在时间和空间上的偏移问题的车载雷达的目标同步方法。
技术实现思路
1、本技术提供了一种车载雷达的目标同步方法、装置、设备及存储介质,预先确定主雷达与从雷达的安装位置,在雷达使用时,基于安装位置确定雷达扫描平均相位差对从雷达进行相位修正,提高了点云融合精度,解决了自动驾驶中多个雷达同一相位扫描到的目标位置上存在时间和空间上的偏移大的问题。
2、根据本技术的一方面,提出了一种车载雷达的目标同步方法,所述方法包括:
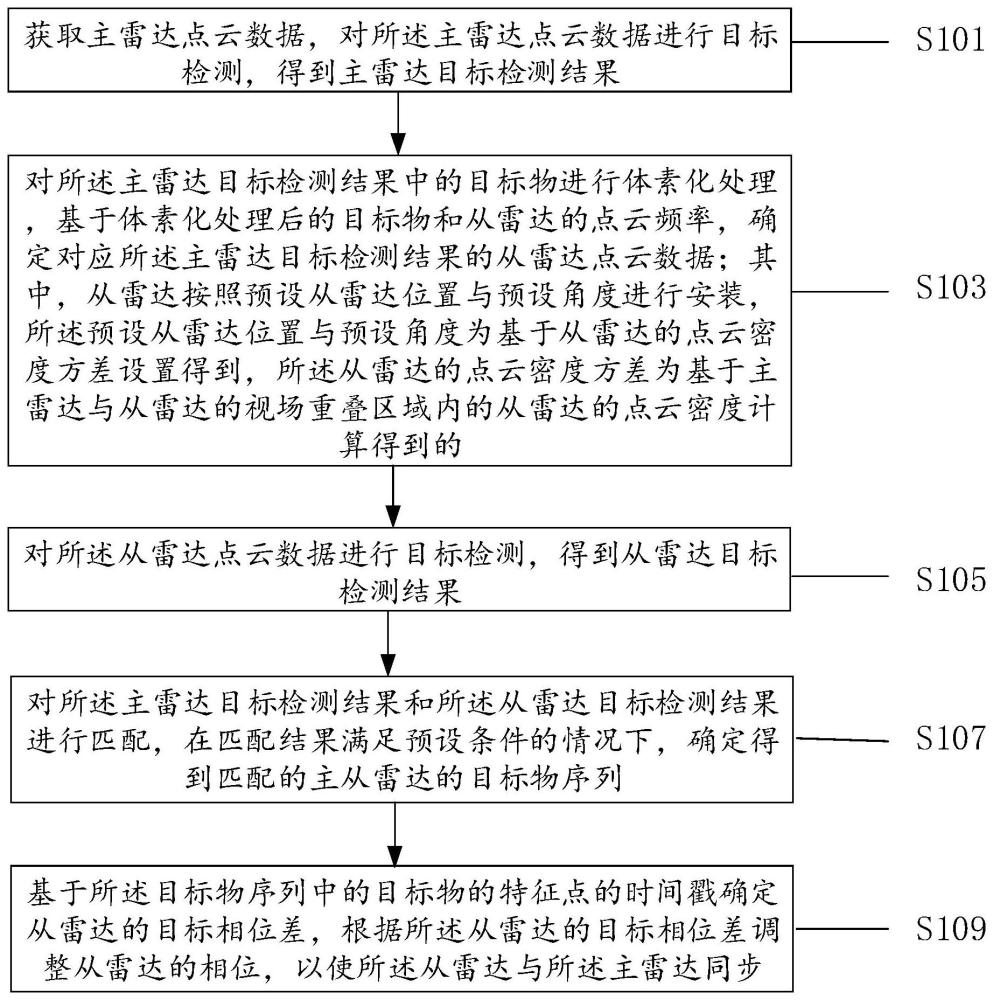
3、获取主雷达点云数据,对所述主雷达点云数据进行目标检测,得到主雷达目标检测结果;
4、对所述主雷达目标检测结果中的目标物进行体素化处理,基于体素化处理后的目标物和从雷达的点云频率,确定对应所述主雷达目标检测结果的从雷达点云数据;其中,从雷达按照预设从雷达位置与预设角度进行安装,所述预设从雷达位置与预设角度为基于从雷达的点云密度方差设置得到,所述从雷达的点云密度方差为基于主雷达与从雷达的视场重叠区域内的从雷达的点云密度计算得到的;
5、对所述从雷达点云数据进行目标检测,得到从雷达目标检测结果;
6、对所述主雷达目标检测结果和所述从雷达目标检测结果进行匹配,在匹配结果满足预设条件的情况下,确定得到匹配的主从雷达的目标物序列;
7、基于所述目标物序列中的目标物的特征点的时间戳确定从雷达的目标相位差,根据所述从雷达的目标相位差调整从雷达的相位,以使所述从雷达与所述主雷达同步。
8、在一种可能的实现方式中,所述主雷达目标检测结果包括至少一个目标物,
9、所述对所述主雷达目标检测结果中的目标物进行体素化处理,基于体素化处理后的目标物和从雷达的点云频率,确定对应所述主雷达目标检测结果的从雷达点云数据,包括:
10、对所述主雷达目标检测结果中的每个目标物的尺寸信息进行体素化处理,得到每个目标物的体素网格;
11、基于每个目标物的体素网格和从雷达的点云频率,确定对应所述主雷达目标检测结果的从雷达点云数据。
12、在一种可能的实现方式中,在基于所述主雷达目标检测结果中的目标物的尺寸信息进行体素化处理之前,所述方法包括:
13、将满足预设滤除条件的目标物从所述主雷达目标检测结果滤除,得到滤除后的主雷达目标检测结果;
14、所述对所述主雷达目标检测结果中的每个目标物的尺寸信息进行体素化处理,得到每个目标物的体素网格,包括:
15、对滤除后的主雷达目标检测结果中的每个目标物的尺寸信息进行体素化处理,得到每个目标物的体素网格。
16、在一种可能的实现方式中,所述主雷达、所述从雷达和所述目标物位于同一个空间直角坐标系、且使用坐标表示位置,所述空间直角坐标系包括原点和过原点互相垂直的三条坐标轴,所述三条坐标轴分别为横轴、纵轴和竖轴,任意两条坐标轴确定一个坐标平面,且三个坐标平面互相垂直,其中横轴与纵轴所确定的坐标面为第一坐标平面,
17、所述基于每个目标物的体素网格和从雷达的点云频率,确定对应所述主雷达目标检测结果的从雷达点云数据,包括:
18、将每个目标物的每个体素网格投影到空间直角坐标系的第一坐标平面上,得到每个目标物的每个体素网格的投影区域,将每个目标物的每个体素网格的投影区域的中心点坐标作为每个目标物的每个体素网格在第一坐标平面上的坐标;
19、基于每个目标物的每个体素网格在第一坐标平面上的坐标、主雷达的坐标和从雷达的坐标点,根据余弦定理计算得到每个目标物的每个体素网格的夹角,所述夹角为每个体素网格在第一坐标平面上的坐标与主雷达的坐标和从雷达的坐标之间的夹角;
20、基于每个目标物的每个体素网格的夹角和所述从雷达的点云频率,计算得到每个目标物的每个体素网格的主雷达和从雷达扫描的时间差;
21、基于所述时间差对每个目标物的每个体素网格内的点进行搜索处理,将满足预设条件的从雷达点云确定为对应所述主雷达目标检测结果的从雷达点云数据。
22、在一种可能的实现方式中,所述预设从雷达位置与预设角度的确定方法包括:
23、基于从雷达的初始位置信息,获取主雷达与从雷达的初始视场重叠区域内的点云数据,所述初始位置信息包括从雷达的位置和角度;
24、基于主雷达的线束分布信息对所述初始视场重叠区域进行划分,得到多个初始封闭区域;
25、基于每个初始封闭区域的面积和每个初始封闭区域内的从雷达的点云数据,计算每个初始封闭区域的从雷达点云分布,得到每个初始封闭区域的点云密度;
26、计算所有初始封闭区域的点云密度的方差,得到点云密度方差;
27、在所述点云密度方差大于预设方差阈值的情况下,调整所述从雷达的初始位置信息,将调整后的所述从雷达的初始位置信息重新作为所述从雷达的初始位置信息,重新得到所述点云密度方差;
28、在所述点云密度方差小于预设方差阈值的情况下,确定小于预设方差阈值的点云密度方差对应的从雷达的初始位置信息为从雷达的目标位置信息,根据所述从雷达的目标位置信息得到预设从雷达位置与预设角度。
29、在一种可能的实现方式中,在对所述从雷达点云数据进行目标检测之前,所述方法包括:
30、基于外参矩阵,对所述从雷达点云数据进行坐标转换处理,以使所述从雷达点云数据与所述主雷达点云数据的坐标系相同,所述外参矩阵是基于标定得到的;
31、相应地,所述对所述从雷达点云数据进行目标检测,得到从雷达目标检测结果,包括:
32、对经过坐标转换处理的所述从雷达点云数据进行目标检测,得到从雷达目标检测结果。
33、在一种可能的实现方式中,所述主雷达目标检测结果包括至少一个目标物的主雷达点云、位置信息和尺寸信息,所述从雷达目标检测结果包括至少一个目标物的从雷达点云、位置信息和尺寸信息,
34、所述对所述主雷达目标检测结果和所述从雷达目标检测结果进行匹配,包括:
35、对所述主雷达目标检测结果中的每个目标物的主雷达点云进行体素化处理,得到每个目标物的主雷达体素网格,以及对所述从雷达目标检测结果中的每个目标物的从雷达点云进行体素化处理,得到每个目标物的从雷达体素网格;
36、基于每个目标物的主雷达体素网格和每个目标物的从雷达体素网格进行匹配处理,计算得到每个目标物的体素网格重叠数据;
37、基于所述主雷达目标检测结果中每个目标物的位置信息和所述从雷达目标检测结果中每个目标物的位置信息进行匹配处理,计算得到每个目标物的距离匹配数据;
38、基于所述主雷达目标检测结果中每个目标物的尺寸信息和所述从雷达目标检测结果中每个目标物的尺寸信息进行匹配处理,计算得到每个目标物的尺寸匹配数据和体积匹配数据;
39、基于预设的权重值对每个目标物的所述体素网格重叠数据、所述距离匹配数据、所述尺寸匹配数据和所述体积匹配数据进行加权处理,得到每个目标物的加权匹配值;
40、根据每个目标物的加权匹配值生成所述匹配结果。
41、在一种可能的实现方式中,所述在匹配结果满足预设条件的情况下,确定得到匹配的主从雷达的目标物序列,包括:
42、在所述匹配结果显示所述目标物的加权匹配值满足预设条件的情况下,确定对应满足预设条件的所述加权匹配值的所述主雷达目标检测结果中的目标物,以及所述从雷达目标检测结果中的目标物为一组匹配的目标物;
43、在所述主雷达目标检测结果中的每个目标物与所述从雷达目标检测结果中的一个目标物匹配为一组匹配的目标物的情况下,将所有匹配的目标物作为匹配的主从雷达的目标物序列。
44、在一种可能的实现方式中,所述基于所述目标物序列中的目标物的特征点的时间戳确定从雷达的目标相位差,根据所述从雷达的目标相位差调整从雷达的相位,以使所述从雷达与所述主雷达同步,包括:
45、对所述匹配的主从雷达的目标物序列中的每一组匹配的目标物的主雷达点云数据和从雷达点云数据进行特征提取,得到每一组匹配的目标物的主雷达点云特征点和从雷达点云特征点;
46、对每一组匹配的目标物的主雷达点云特征点和从雷达点云特征点进行特征匹配处理,得到目标物点云的特征点匹配序列;
47、获取目标物点云的特征点匹配序列中每一组匹配的目标物的主雷达点云特征点和从雷达点云特征点对应的时间戳,基于所述时间戳计算得到平均时间差值;
48、基于所述平均时间差值和所述从雷达的点云频率进行乘法运算,确定所述从雷达的目标相位差,根据所述从雷达的目标相位差调整从雷达的相位,以使所述从雷达与所述主雷达同步。
49、另一方面,提供了一种车载雷达的目标同步装置,所述装置包括:
50、主雷达目标检测模块,用于获取主雷达点云数据,对所述主雷达点云数据进行目标检测,得到主雷达目标检测结果;
51、从雷达点云数据确定模块,用于对所述主雷达目标检测结果中的目标物进行体素化处理,基于体素化处理后的目标物和从雷达的点云频率,确定对应所述主雷达目标检测结果的从雷达点云数据;其中,从雷达按照预设从雷达位置与预设角度进行安装,所述预设从雷达位置与预设角度为基于从雷达的点云密度方差设置得到,所述从雷达的点云密度方差为基于主雷达与从雷达的视场重叠区域内的从雷达的点云密度计算得到的;
52、从雷达目标检测模块,用于对所述从雷达点云数据进行目标检测,得到从雷达目标检测结果;
53、目标检测结果匹配模块,用于对所述主雷达目标检测结果和所述从雷达目标检测结果进行匹配,在匹配结果满足预设条件的情况下,确定得到匹配的主从雷达的目标物序列;
54、同步处理模块,用于基于所述目标物序列中的目标物的特征点的时间戳确定从雷达的目标相位差,根据所述从雷达的目标相位差调整从雷达的相位,以使所述从雷达与所述主雷达同步。
55、在一种可能的实现方式中,所述主雷达目标检测结果包括至少一个目标物,
56、所述从雷达点云数据确定模块,用于:
57、对所述主雷达目标检测结果中的每个目标物的尺寸信息进行体素化处理,得到每个目标物的体素网格;
58、基于每个目标物的体素网格和从雷达的点云频率,确定对应所述主雷达目标检测结果的从雷达点云数据。
59、在一种可能的实现方式中,在基于所述主雷达目标检测结果中的目标物的尺寸信息进行体素化处理之前,所述主雷达目标检测模块,用于:
60、将满足预设滤除条件的目标物从所述主雷达目标检测结果滤除,得到滤除后的主雷达目标检测结果;
61、所述从雷达点云数据确定模块,用于:
62、对滤除后的主雷达目标检测结果中的每个目标物的尺寸信息进行体素化处理,得到每个目标物的体素网格。
63、在一种可能的实现方式中,所述主雷达、所述从雷达和所述目标物位于同一个空间直角坐标系、且使用坐标表示位置,所述空间直角坐标系包括原点和过原点互相垂直的三条坐标轴,所述三条坐标轴分别为横轴、纵轴和竖轴,任意两条坐标轴确定一个坐标平面,且三个坐标平面互相垂直,其中横轴与纵轴所确定的坐标面为第一坐标平面,
64、所述从雷达点云数据确定模块,包括:
65、将每个目标物的每个体素网格投影到空间直角坐标系的第一坐标平面上,得到每个目标物的每个体素网格的投影区域,将每个目标物的每个体素网格的投影区域的中心点坐标作为每个目标物的每个体素网格在第一坐标平面上的坐标;
66、基于每个目标物的每个体素网格在第一坐标平面上的坐标、主雷达的坐标和从雷达的坐标点,根据余弦定理计算得到每个目标物的每个体素网格的夹角,所述夹角为每个体素网格在第一坐标平面上的坐标与主雷达的坐标和从雷达的坐标之间的夹角;
67、基于每个目标物的每个体素网格的夹角和所述从雷达的点云频率,计算得到每个目标物的每个体素网格的主雷达和从雷达扫描的时间差;
68、基于所述时间差对每个目标物的每个体素网格内的点进行搜索处理,将满足预设条件的从雷达点云确定为对应所述主雷达目标检测结果的从雷达点云数据。
69、在一种可能的实现方式中,所述从雷达点云数据确定模块包括预设从雷达位置与预设角度的确定单元,用于:
70、基于从雷达的初始位置信息,获取主雷达与从雷达的初始视场重叠区域内的点云数据,所述初始位置信息包括从雷达的位置和角度;
71、基于主雷达的线束分布信息对所述初始视场重叠区域进行划分,得到多个初始封闭区域;
72、基于每个初始封闭区域的面积和每个初始封闭区域内的从雷达的点云数据,计算每个初始封闭区域的从雷达点云分布,得到每个初始封闭区域的点云密度;
73、计算所有初始封闭区域的点云密度的方差,得到点云密度方差;
74、在所述点云密度方差大于预设方差阈值的情况下,调整所述从雷达的初始位置信息,将调整后的所述从雷达的初始位置信息重新作为所述从雷达的初始位置信息,重新得到所述点云密度方差;
75、在所述点云密度方差小于预设方差阈值的情况下,确定小于预设方差阈值的点云密度方差对应的从雷达的初始位置信息为从雷达的目标位置信息,根据所述从雷达的目标位置信息得到预设从雷达位置与预设角度。
76、在一种可能的实现方式中,在对所述从雷达点云数据进行目标检测之前,所述从雷达目标检测模块,用于:
77、基于外参矩阵,对所述从雷达点云数据进行坐标转换处理,以使所述从雷达点云数据与所述主雷达点云数据的坐标系相同,所述外参矩阵是基于标定得到的;
78、相应地,所述从雷达目标检测模块,用于:
79、对经过坐标转换处理的所述从雷达点云数据进行目标检测,得到从雷达目标检测结果。
80、在一种可能的实现方式中,所述主雷达目标检测结果包括至少一个目标物的主雷达点云、位置信息和尺寸信息,所述从雷达目标检测结果包括至少一个目标物的从雷达点云、位置信息和尺寸信息,
81、所述目标检测结果匹配模块,用于:
82、对所述主雷达目标检测结果中的每个目标物的主雷达点云进行体素化处理,得到每个目标物的主雷达体素网格,以及对所述从雷达目标检测结果中的每个目标物的从雷达点云进行体素化处理,得到每个目标物的从雷达体素网格;
83、基于每个目标物的主雷达体素网格和每个目标物的从雷达体素网格进行匹配处理,计算得到每个目标物的体素网格重叠数据;
84、基于所述主雷达目标检测结果中每个目标物的位置信息和所述从雷达目标检测结果中每个目标物的位置信息进行匹配处理,计算得到每个目标物的距离匹配数据;
85、基于所述主雷达目标检测结果中每个目标物的尺寸信息和所述从雷达目标检测结果中每个目标物的尺寸信息进行匹配处理,计算得到每个目标物的尺寸匹配数据和体积匹配数据;
86、基于预设的权重值对每个目标物的所述体素网格重叠数据、所述距离匹配数据、所述尺寸匹配数据和所述体积匹配数据进行加权处理,得到每个目标物的加权匹配值;
87、根据每个目标物的加权匹配值生成所述匹配结果。
88、在一种可能的实现方式中,所述目标检测结果匹配模块,用于:
89、在所述匹配结果显示所述目标物的加权匹配值满足预设条件的情况下,确定对应满足预设条件的所述加权匹配值的所述主雷达目标检测结果中的目标物,以及所述从雷达目标检测结果中的目标物为一组匹配的目标物;
90、在所述主雷达目标检测结果中的每个目标物与所述从雷达目标检测结果中的一个目标物匹配为一组匹配的目标物的情况下,将所有匹配的目标物作为匹配的主从雷达的目标物序列。
91、在一种可能的实现方式中,所述同步处理模块,用于:
92、对所述匹配的主从雷达的目标物序列中的每一组匹配的目标物的主雷达点云数据和从雷达点云数据进行特征提取,得到每一组匹配的目标物的主雷达点云特征点和从雷达点云特征点;
93、对每一组匹配的目标物的主雷达点云特征点和从雷达点云特征点进行特征匹配处理,得到目标物点云的特征点匹配序列;
94、获取目标物点云的特征点匹配序列中每一组匹配的目标物的主雷达点云特征点和从雷达点云特征点对应的时间戳,基于所述时间戳计算得到平均时间差值;
95、基于所述平均时间差值和所述从雷达的点云频率进行乘法运算,确定所述从雷达的目标相位差,根据所述从雷达的目标相位差调整从雷达的相位,以使所述从雷达与所述主雷达同步。
96、另一方面,提供了一种电子设备,包括处理器和存储器,所述存储器中存储有至少一条指令或者至少一段程序,所述至少一条指令或者所述至少一段程序由所述处理器加载并执行以实现上述任一方面的车载雷达的目标同步方法。
97、另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一条指令或者至少一段程序,所述至少一条指令或者所述至少一段程序由处理器加载并执行以实现如上述任一方面的车载雷达的目标同步方法。
98、另一方面,提供了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。电子设备的处理器从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该电子设备执行上述任一方面的车载雷达的目标同步方法。
99、本技术实施例通过选定主雷达位置与角度,当从雷达在不同的相对位置和角度时,根据主雷达与从雷达地面点云分布情况,确定主雷达与从雷达的视场重叠区域;在视场重叠区域内,以主雷达线束分布的曲线形成封闭区间,计算封闭区间内的各子区间的从雷达点云密度和密度方差;确定当各子区间的从雷达点云密度方差为最小值时,从雷达的位置和角度即为最终确定值;在从雷达位置与角度确定的基础上,根据雷达视场重叠区域的目标特征分布来计算从雷达的平均相位差值,根据从雷达的平均相位差值对从雷达进行相位修正,以使从雷达与主雷达同步,实现根据雷达场景内的目标物动态修正相位,解决了由于雷达安装位置和角度不同使多个雷达同一相位扫描到的目标位置上存在时间和空间上的偏移大的问题,提高多雷达的同步精度,进而提高了点云融合后目标点云融合结果的精准性。
- 还没有人留言评论。精彩留言会获得点赞!