一种物体3D数据采集系统及采集方法与流程
本发明属于三维检测设备,具体涉及一种物体3d(three dimension,三维)数据采集系统及采集方法。
背景技术:
1、在工业生产线中,产品的尺寸测量、异常检测依赖于物体的表面数字化,一般基于3d数据采集系统来实现。
2、在3d数据采集系统中,一般通过3d扫描仪采集物体3d数据。3d扫描仪中的投影仪将特征图投影到待扫描的物体上,并且通过3d扫描仪中一个或多个相机检测特征图,从采集到的特征图图像中即可获取物体的3d数据,所获取的物体3d数据是在3d扫描仪坐标系中。
3、目前,基于条纹图的3d扫描仪已经有许多成熟的商业产品。
4、然而,对于大型物体数字化,3d扫描仪必须移动到不同的记录位置,并且将各个记录位置的物体局部3d数据统一到全局坐标系中,以便能够从各个记录位置处的局部3d数据中获取物体完整的3d数据。这需要对各个记录位置在全局坐标系中的位姿进行精确跟踪和检测。
5、目前常用的方法是基于参考标记将物体局部3d数据转换到统一的坐标系下,从而获取完整的物体3d数据。
6、早期,主要是基于人工贴点,在待扫描物体表面粘贴标志点,基于标志点匹配将在多个位置采集的物体局部3d数据转换到统一的坐标系下。但是标志点需要人工粘贴和清除,效率低下、灵活性差。同时,粘贴和清除标志点的过程也会在物体表面引入新的缺陷。
7、为了提高灵活性,减少扫描过程中人为因素的影响,很多3d数据采集系统引入了额外的投影仪,将额外的投影仪固定于物体周围,向待扫描物体投射标志点图案。然而,对于大物体,需要大量额外的投影仪才能覆盖物体,极大的增加了测量准备工作,同时也给现场的安装和维护带来很大难度。
8、特别是在汽车生产线中,由于车身结构的复杂性,上述的方法存在很大的实施难度和维护难度。同时也不能根据不同车型灵活调整投射方案。
技术实现思路
1、为了解决现有技术存在的上述问题,本发明提供一种物体3d数据采集系统及采集方法,改进了现有的物体数字化系统和方法,减少系统对人工的依赖并且能够降低系统实施难度和维护难度,从而增强系统对复杂物体的兼容性,提高效率,降低维护成本。
2、本发明是通过以下技术方案实现的:
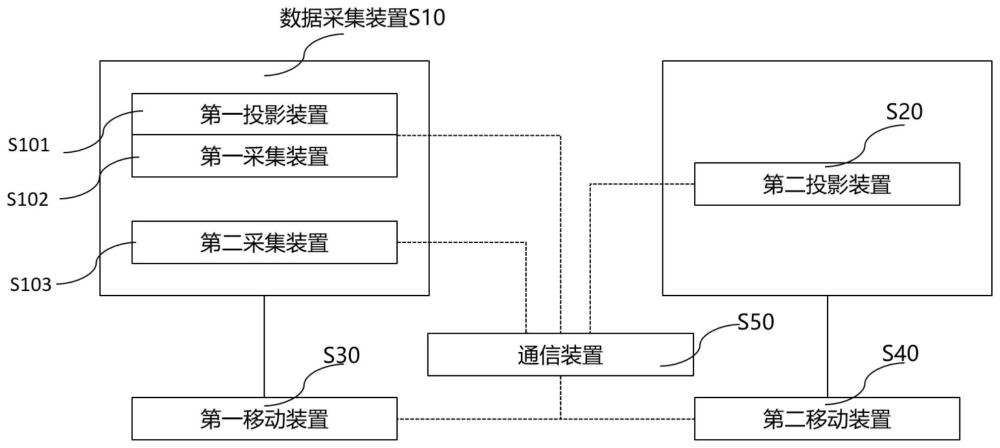
3、作为本发明的第一方面,提供一种物体3d数据采集系统,包括:数据采集装置s10、第二投影装置s20、第一移动装置s30、第二移动装置s40以及通信装置s50,所述数据采集装置s10、第二投影装置s20、第一移动装置s30以及第二移动装置s40通过通信装置s50通讯连接;
4、所述数据采集装置s10用于向待扫描物体表面投射特征图并获取待扫描物体表面的2d特征数据和3d数据;
5、所述第一移动装置s30用于移动所述数据采集装置s10到预定义的采集位置,所述数据采集装置s10固定于所述第一移动装置s30;
6、所述第二移动装置s40用于移动所述第二投影装置s20到预定义的投影位置,所述第二投影装置s20固定于所述第二移动装置s40。
7、进一步地,所述第二投影装置s20包括至少一个投影仪,用于向待扫描物体表面投射第二特征图。
8、进一步地,所述数据采集装置s10包括第一投影装置s101、与第一投影装置s101配套的第一采集装置s102,以及与所述第二投影装置s20配套的第二采集装置s103,第一投影装置s101、第一采集装置s102以及第二投影装置s20集成在同一个刚体结构上,相对位置保持稳定不变。
9、进一步地,所述第一投影装置s101包括至少一个投影仪,用于向待扫描物体表面投射第一特征图;本实施例中,第一特征图是一个或者多个正弦条纹图像;
10、所述第一采集装置s102包括至少一个相机,用于采集所述待扫描物体表面对所述第一特征图的反射图像,获取待扫描物体表面的3d数据;
11、所述第二采集装置s103包括至少一个相机,用于采集所述被待扫描物体表面对第二特征图的反射图像,获取待扫描物体表面的2d特征数据。
12、进一步地,所述第一投影装置向待扫描物体表面投射的第一特征图和第二投影装置向待扫描物体表面投射的第二特征图互不干扰。
13、进一步地,所述第一特征图可采用蓝光投影,第二特征图可采用红光投影;与所述第一特征图对应的第一采集装置能够感知蓝光且不能感知红光,与所述第二特征图对应的第二采集装置能够感知红光且不能感知蓝光。
14、进一步地,所述第二采集装置在相邻位置的采集范围重叠;相应的,第二投影装置在预定义的与该采集位置相对应投影位置投射的第二特征图至少有部分投射在重叠区域,重叠区域有充足的2d特征点。
15、作为本发明的第二方面,同时提供一种物体3d数据采集方法,其通过所述的物体3d数据采集系统实线,包括:
16、s601.准备步骤:将待测物体划分区域,根据划分的示教数据采集路径及与数据采集路径相对应的投影路径;
17、s602.反射图像采集:根据所述步骤s601示教的数据采集位置和相应的投影位置,顺序采集每个区域对第一特征图的反射图像和对第二特征图的反射图像;
18、s603.表面重建:在每个迭代采集步骤采集的3d数据,通过第一投影装置在同一个位置投射的第二特征图在相邻采集位置被采集的第二特征图反射图像,计算变换关系;基于优化后的相邻采集位置之间变换关系,将多个采集位置获取的3d数据通过融合获得待扫描物体表面完整的3d数据。
19、进一步地,所述步骤s601包括:将待检测物体s划分四个区域,记为{s1、s2、s3、s4},相邻区域之间存在区域重叠,与{s1、s2、s3、s4}四个区域对应的数据采集位置分别为与数据采集位置相对应的投影位置分别
20、进一步地,所述步骤s602包括:
21、s6021.初始化:
22、所述通信装置触发所述第一移动装置搭载所述数据采集装置有序移动到数据采集位置
23、所述通信装置触发所述第一投影装置向待扫描物体表面投射所述第一特征图;
24、所述通信装置触发所述第一采集装置采集被待扫描物体表面对第一特征图的反射图像并据此获取对应的3d数据
25、s6022.迭代采集:
26、1)对采集位置与采集位置对应的投影位置与相邻的采集位置执行迭代采集,获取采集位置的第二特征图的反射图像和采集位置的第二特征图的翻身图像以及的第一特征图的反射图像
27、所述通信装置触发所述第二移动装置搭载所述第二投影装置到投影位置
28、所述通信装置触发所述第二采集装置采集第二特征图的反射图像
29、所述第一移动装置搭载所述数据采集装置到数据采集位置
30、所述通信装置触发所述第二采集装置采集第二特征图的反射图像
31、所述通信装置分别触发所述第一投影装置向待扫描物体表面投射第一特征图,触发所述第一采集装置采集第一特征图的反射图像并据此获取对应的3d数据
32、2)对采集位置与采集位置对应的投影位置与相邻的采集位置执行迭代采集,从而获取采集位置的第二特征图的反射图像和的第二特征图的反射图像以及采集位置的第一特征图的反射图像
33、所述通信装置触发所述第二移动装置搭载所述第二投影装置到投影位置
34、所述通信装置触发所述第二采集装置采集第二特征图的反射图像
35、所述第一移动装置搭载所述数据采集装置到数据采集位置
36、所述通信装置触发所述第二采集装置采集第二特征图的反射图像
37、所述通信装置分别触发所述第一投影装置向待扫描物体表面投射第一特征图,触发所述第一采集装置采集第一特征图的图像并据此获取对应的3d数据
38、3)重复上述迭代采集过程,直至完成所有四个区域的2d特征数据采集和3d数据采集。
- 还没有人留言评论。精彩留言会获得点赞!